基于汽车纵向主动安全的控制方式研究
2016-07-20张文康潘文章
张文康+潘文章
摘 要 本文主要针对汽车的安全性能,从纵向主动安全控制方式,高效快速的测量物体之间的距离,提高汽车的安全性能。文章首先介绍基于汽车纵向主动安全的控制方式——汽车主动安全避撞系统的相关概念,在此基础上,分析了其在汽车信息感知、处理以及安全判断等的作用。希望通过本文分析,为相关领域进行汽车安全研究提供借鉴。
关键词 汽车;纵向主动安全;控制方式
中图分类号 U46 文献标识码 A 文章编号 1674-6708(2016)164-0193-01
随着汽车行业竞争的不断增加,作为推动汽车工业发展的重要保障,对汽车控制技术进行理论与方法创新具有极为重要的现实作用。汽车安全性作为最基本的性能至关重要,作为主动安全控制的重要方式,纵向主动控制模式可以高效快速的测量物体之间的距离,可以为驾驶人员提供有效的信息,可以有效避免汽车碰撞事故的产生,因此极为重要。现今,汽车的安全装置包括2种,即主动安全装置和被动安全装置。其中主动安全装置主要基于汽车本身,为降低事故发生,主动采取措施的配置;被动安全装置指的是当事故发生之后,为避免人员的伤亡以及财物的受损等,汽车本身采取的措施。在纵向主动安全控制中,最为成熟的技术为汽车主动安全避撞控制技术,本文主要针对汽车主动安全避撞控制技术研究基于汽车纵向主动安全的控制方式。
1 汽车主动安全避撞技术
汽车主动安全避撞技术作为最为成熟的主动安全技术,可以自动检测可能与汽车产生碰撞的车辆、行人等障碍物,并及时发出报警措施。其组成包括车用测距传感器、气节门位置传感器、路况检测传感器等。
1.1 行车信息感知以及处理
行车信息感知以及处理主要基于汽车上各种传感器,包括车用测距传感器、气节门位置传感器等,对车辆的运行进行实时监测,并对必要信息进行处理,进而获得可靠、有效以及准确的形成数据。对于汽车主动安全避撞控制系统所包含的车间距离测量传感器,属于主动避撞系统所独有的。目前,国内外对于汽车纵向主动安全控制方式的研究,主要集中在对车间距离测量传感器的研究和对测量信息的处理方面。
依据实现方式的不同,可将车间距离传感器分为2种,即以机器视觉为实现方式的车间距离测量研究;以车载雷达系统为实现模式的车间距离测量研究。其中前者主要基于视觉信号,获得车间的距离值,其中视觉信号具有以下优势,即探测范围极宽、目标信息的完整性较好等,尤其是基于道路以及分道线的探测,具有不可比拟的优越性,但此种模式存在极大的缺陷,表现在运算量巨大,对数据测量的实时性较低;摄像头影响极大,且对于车间距离的测量,精度极低。
以车载雷达系统作为实现方式的车间距离测量,主要利用微波以及激光雷达的方式,经过处理雷达信号,获得所需的车间距离以及相对速度等。同以机器视觉为实现方式的车间距离相比,雷达测量具有好的实时性、准确性,这使得国内外很多研究人员选择器作为车辆距离获得的主要模式。通过介质的区别,可将其分为激光雷达以及微波雷达2种,其中同激光雷达相比,微波雷达的运行更加可靠,更不易受外界环境的干扰,但此种模式具有极高的成本以及结构极其复杂。
通过雷达获得的车辆运动信息,基于测量原理的限制,所获得的目标信息含有很多测量噪声,因此,需要进行处理。目前采用最多的处理方式为卡尔曼滤波原理,但从原理分析,如果车辆相对于自车来讲,具有恒定的相对速度或者是相对加速度,则采用卡尔曼滤波可以得到准确实时的车辆信息。但在实际中,汽车的速度以及加速度会经常发生变化,采用卡尔曼滤波则难以获得准确、实时的车辆信息。因此,在基于汽车纵向主动安全的应用中,要注意。
1.2 行车的安全判断
汽车纵向安全距离模型分为前向与后向2部分,其中两者之间的判断存在极大差别,因此,要分别考虑前向模型与后向模型2种。如图1所示,为汽车以及其他车辆之间的相对位置形势图。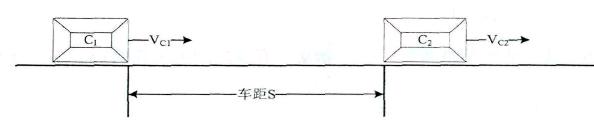
其中C1以及C2分别表示同向行驶的两辆车,T时刻,两车之间距离为S,两车之间的相对行驶关系如表1所示。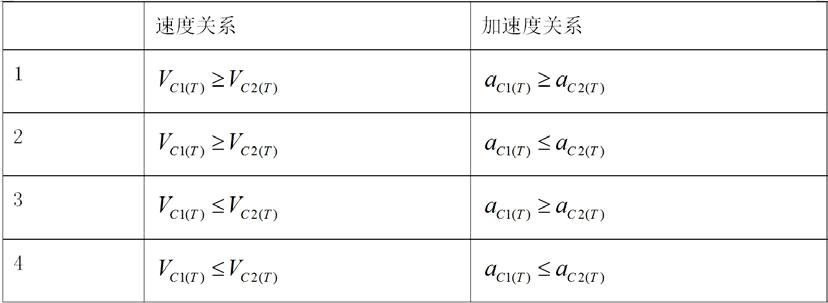
1.2.1 前向的安全距离模型
基于前向的安全距离模型主要包括2种警戒方式,即一般提醒报警以及紧急危险报警。
汽车在制动停止后,两汽车之间应保持一个相对安全的距离s d,这一间距的选取要合理,否则会影响系统的虚警率,目前,国内外相关资料定义的相对安全距离为2m~5m,为进一步加强虚警率的降低,同时还可以确保汽车的安全,在基于汽车的前向安全距离模型中,一般选取mds2=。
对于汽车,其在运动过程中,本身的车速1 V可以通过车载速度传感器获得,两车的相对速度1 2CV可以通过公式(1)表示: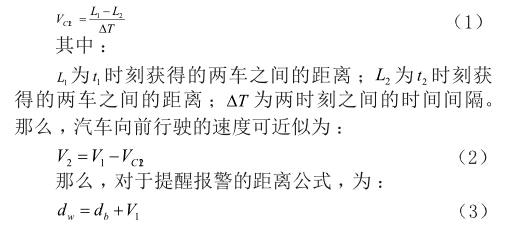
其中,wd表示一般的提醒报警距离;b d表示紧急危险情况下的报警距离。
1.2.2 后向的安全距离模型
汽车追尾事故的发生一般会引起连环反应,为了保证汽车在行驶当中具有足够的安全,则需要研究汽车的后向安全距离模型。当汽车在紧急制动条件下,后方车辆还处于加速条件,这种情况极其危险。本文基于后向的安全距离模型构建,主要基于2种状态,即:车辆相对速度为负值条件,汽车的危险系数极低,此时不报警;
随着汽车纵向主动控制系统的日趋复杂以及要求的越来越高,基于现代信息技术、传感技术作为基础的汽车纵向主动安全控制技术的要求越来越高,在车辆行驶过程中,对汽车纵向主动安全控制的人性化要求越来越强。在此基础上,对基于汽车纵向主动安全的控制方式研究具有极强的现实意义。本文基于汽车纵向主动安全的控制方式——汽车主动安全避撞系统的相关概念,在此基础上,分析了其在汽车信息感知、处理以及安全判断等的作用。希望通过本文分析,为相关领域进行汽车安全研究提供借鉴。
参考文献
[1]王建强,刘刚,李克强,等.复杂路况下汽车主动避撞报警技术研究[J].公路交通科技,2005,22(4):132-135.
[2]赵政春,陆绮荣,蒋冬初.汽车障碍物检测系统的设计[J].计算机测量与控制,2007,15(4):432-434.
[3]唐文,李绍文.汽车主动避撞系统的改进方法与讨论[J].汽车电子,2009,25(11-12):203-205.
