自抗扰控制器应用于水轮机调速系统的仿真分析
2016-07-18要亚斌王利杰邵丽娜
要亚斌,王利杰,邵丽娜
(1. 河北省电力勘测设计研究院,石家庄 050031;2.国网河北省电力公司电力科学研究院,石家庄 050021)
自抗扰控制器应用于水轮机调速系统的仿真分析
要亚斌1,王利杰2,邵丽娜1
(1. 河北省电力勘测设计研究院,石家庄050031;2.国网河北省电力公司电力科学研究院,石家庄050021)
摘要:针对水轮机调速系统的特点,提出在水轮机调速系统中引入自抗扰控制的策略。介绍水轮机调速系统的原理,分析自抗扰控制器的特点,搭建带自抗扰控制器的仿真模型,将传统PID仿真结果与带自抗扰控制器的仿真结果进行比对,结果表明自抗扰控制器能有效改善水轮机系统的控制品质,并具有工程实际价值。
关键词:自抗扰控制器;水轮机;调速系统;调速器;仿真
0引言
水力发电过程控制分为3个层次[1]:设备层级控制、电厂层级控制、电网层级控制。设备层级控制虽处于整个水力发电过程控制系统的最底层控制,而水轮机转速调节系统又位于机组层级控制的最高端。因此,水轮机调速器作为转速调节系统的控制器,其控制性能就显得尤为重要和关键[2]。
自抗扰控制器(ADRC)自PID控制器演变过来,采取了PID误差反馈控制的核心理念。传统PID采用设定值与系统输出的误差作为其输入信号,容易导致系统的快速性和超调行之间出现矛盾。于是自抗扰控制器吸取了现代控制理论成就,发扬了PID控制技术的精髓,是不依赖于被控对象精确模型的、能够替代PID控制技术的、新型实用数学控制技术[3]。自抗扰控制器可以通过特殊环节获得系统未知扰动和不确定量的估计值,并将估计量反馈到控制系统中,从而实现系统的动态线性化,该理论思想独特,方法简单,不需要系统的精确模型,特别适合具有非线性和时变特性的水轮机调节系统。
1水轮机调速系统原理
水轮机转速调节原理见图1。
水轮机发电机组转动部分可描述为绕固定轴旋转的刚体运动,其运动方程为[3]:
(1)

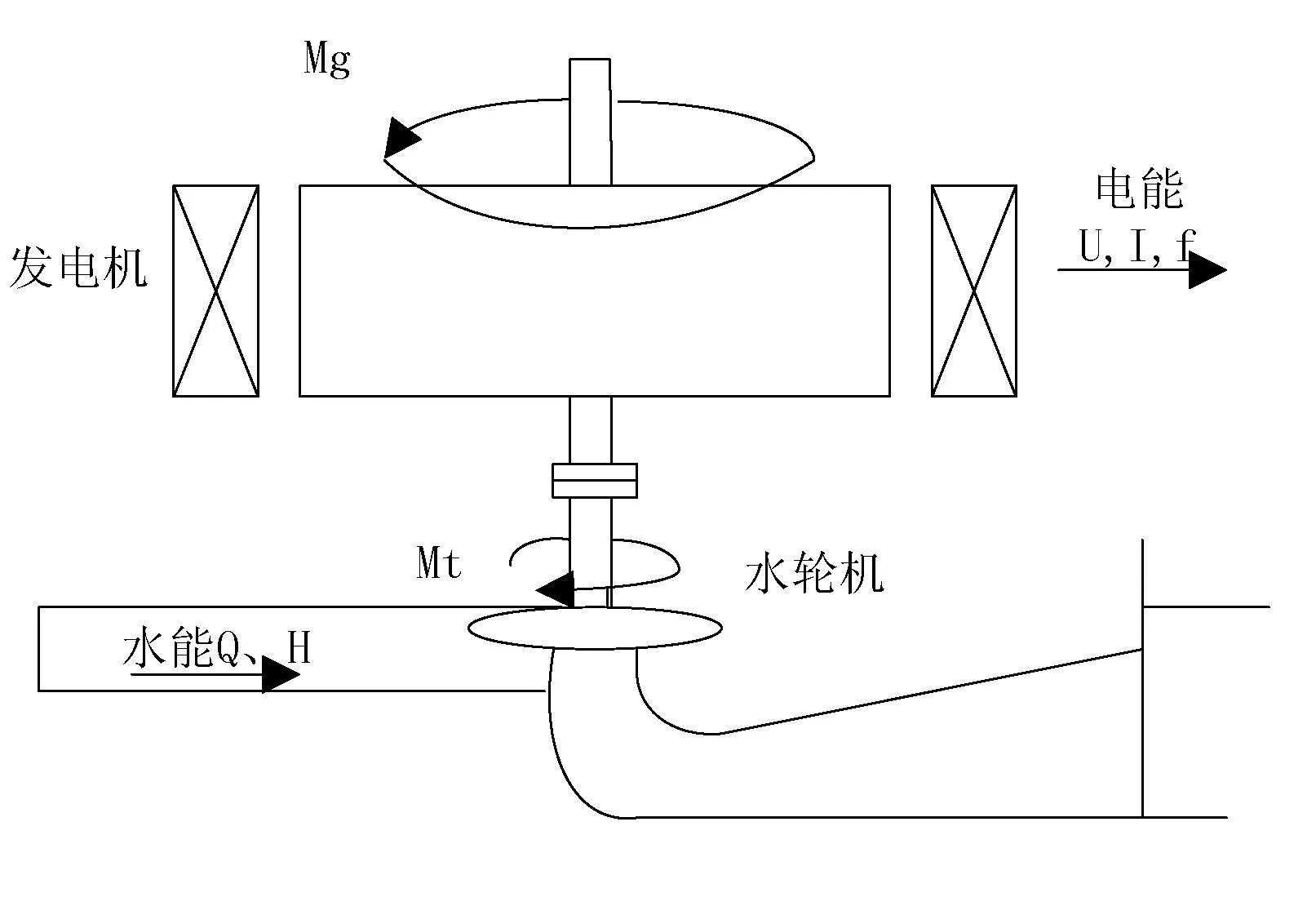
图1 水轮机转速调节原理
则可得出:Mt=Mg
由此可以看出,水轮机主动力矩等于发电机阻力矩是维持水轮发电机组转速或频率恒定的必要条件。为了满足这个条件,水轮机主动力矩必须跟随发电机阻力矩变化而变化,这样才能保证机组转速或者频率恒定不变。
水轮机的主动力矩由水流作用于转轮叶片而产生,水轮机的主动力矩可有公式(2)表示:
(2)
式中:P为机组出力,r为水的容量,Q为水轮机的流量,H为水轮机工作水头,η为水轮机效率。
由此可知,调节水轮机的流量可以改变水轮机的主动力矩,而水轮机的流量可以通过改变导叶开度或喷针开度来实现,这种方法较其他方法简单,易实现。因此当发电机负荷发生变化时,通过调整水轮机开度改变主动力矩的大小,使其与负载主力矩相平衡,以维持机组的转速或频率恒定[4]。
2自抗扰控制器的特点
自抗扰控制器主要由三部分组成:微分跟踪器TD(tracking differentiator),扩展状态观测器ESO(extended state observer)和非线性状态误差反馈控制律NLSEF(nonlinear state error feedback law)。
微分跟踪器的作用是安排过渡过程,给出合理的控制信号,解决了响应速度与超调性之间的矛盾。扩展状态观测器用来解决模型未知部分和外部未知扰动综合对控制对象的影响。虽然叫做扩展状态观测器,但与普通的状态观测器不同。扩展状态观测器设计了一个扩展的状态量来跟踪模型未知部分和外部未知扰动的影响。然后给出控制量补偿这些扰动。将控制对象变为普通的积分串联型控制对象。设计扩展状态观测器的目的就是观测扩展出来的状态变量,用来估计未知扰动和控制对象未建模部分,实现动态系统的反馈线性化,将控制对象变为积分串联型。非线性误差反馈控制律给出被控对象的控制策略。
自抗扰控制器可以通过特殊环节获得系统未知扰动和不确定量的估计值,并将估计量反馈到控制系统中,从而实现系统的动态线性化,该理论思想独特,方法简单,不需要系统的精确模型,特别适合具有非线性和时变特性的水轮机调节系统。
根据水轮机模型,搭建的自抗扰控制器结构如图2所示。
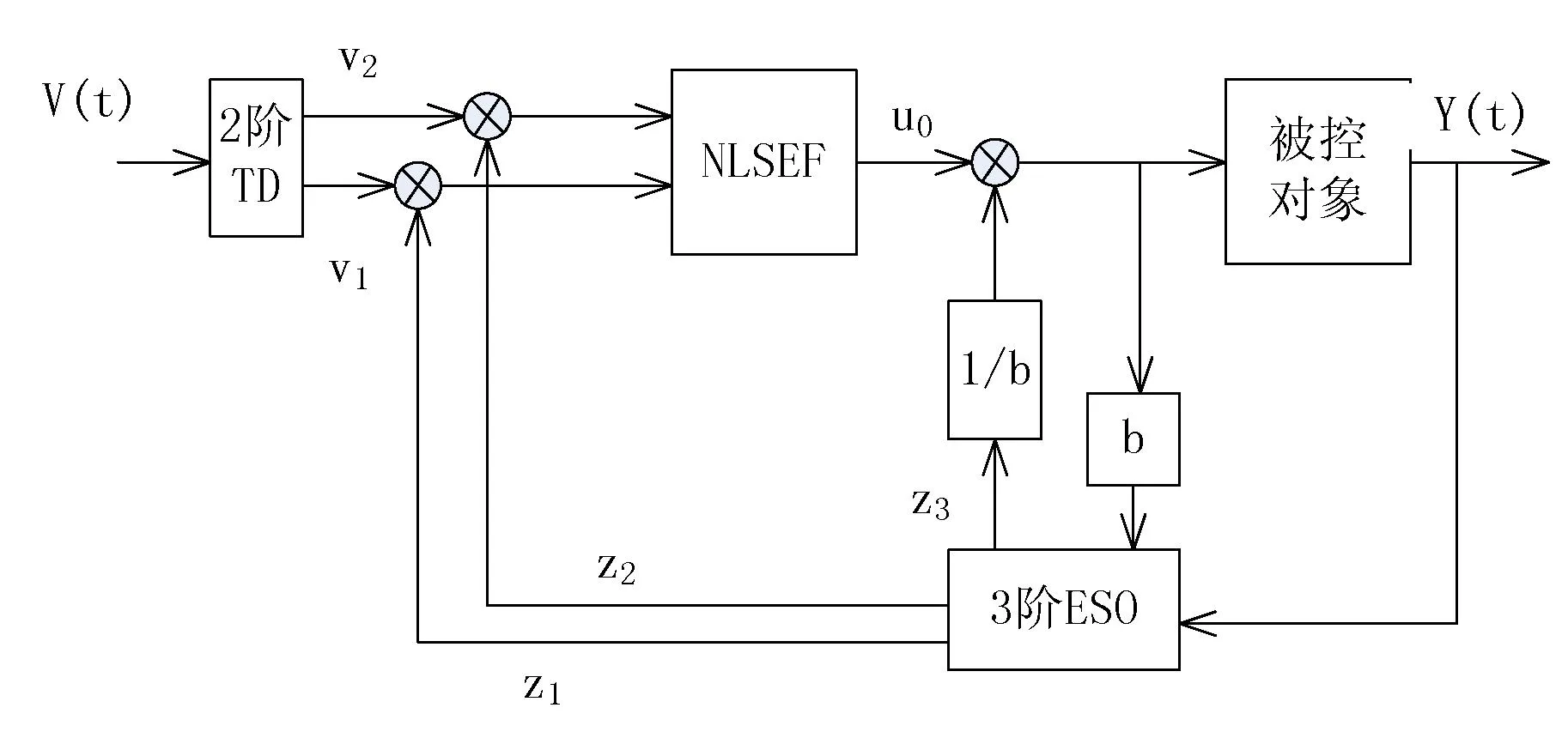
图2 自抗扰控制器结构
3基于自抗扰控制器的水轮机模型仿真
3.1常规PID控制
在MATLAB中建立仿真模型。
经过简化的具有PID调节规律调速器的水轮机调节系统,将对象变为线性传递函数,忽略某些小时间参数,再进行仿真。式中重要参数为:Ty=0.1,Tw=1,en=8,Ta=1,Kp=1.5,KI=1,KD=0。仿真结果如图3所示。
考虑到现场被控对象参数可能测定不准确,所以设定Tw=1.1,en=8.5时,进行二次仿真,该控制器控制效果见图4。
由仿真结果可知,采用常规PID控制器已经可以达到比较好的效果,响应速度快,即使被控对象发生变化,也能有较好的调节效果,即有较强的鲁棒性,调节时间快,只是超调较大。

(a) 频率给定扰动阶跃响应
(b) 功率扰动阶跃响应
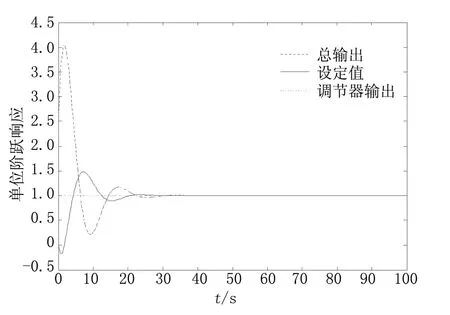
(a) 被控对象参数变化后频率给定扰动阶跃响应

(b) 被控对象参数变化后功率扰动阶跃响应
3.2自抗扰控制
根据水轮机模型,搭建的带自抗扰控制器的仿真模型如图5所示。
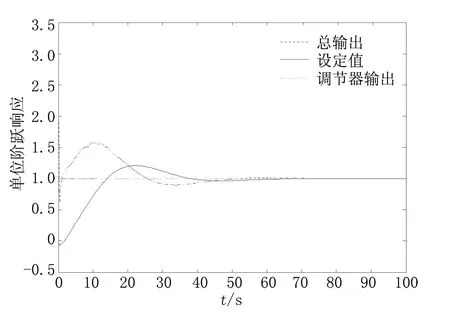
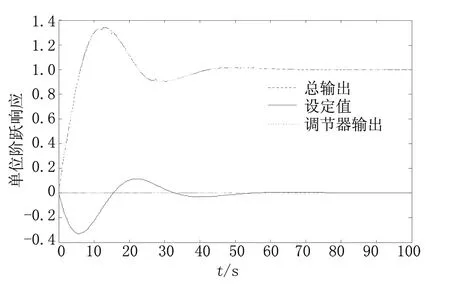
重要参数为:Ty=0.1,Tw=1,en=8,Ta=1,bet1=18,bet2=10,bet3=3,bet1(1)=0.8,bet1(2)=0.8。仿真结果如图6所示。
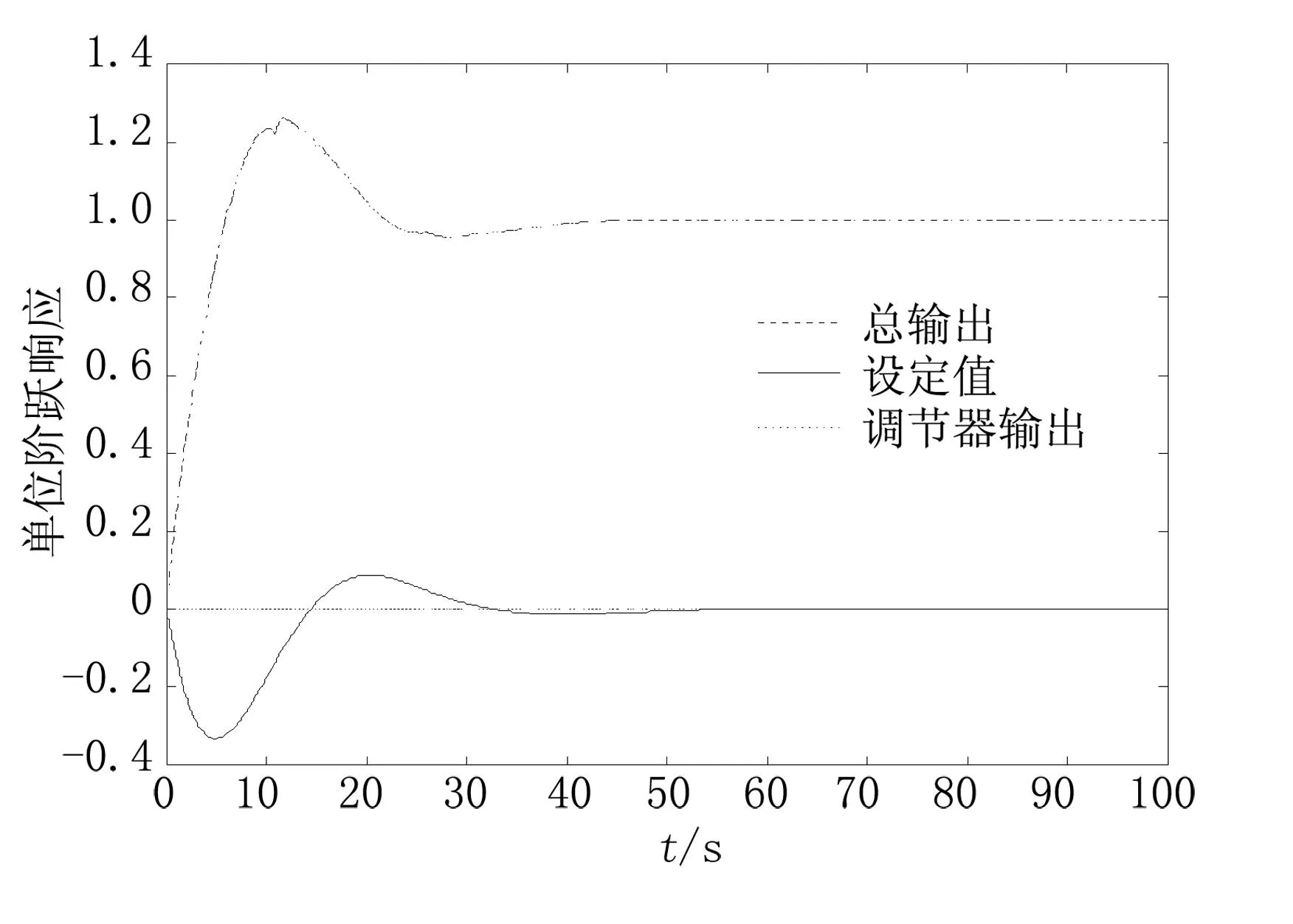
考虑到现场被控对象参数可能测定不准确,所以设定Tw=1.3,en=10时,进行二次仿真,该控制器控制效果见图7。
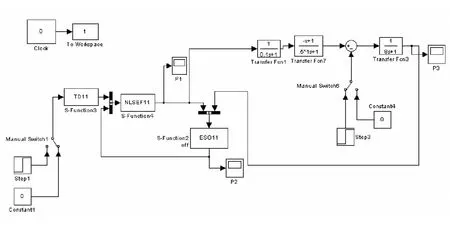
图5 带自抗扰控制器仿真模型
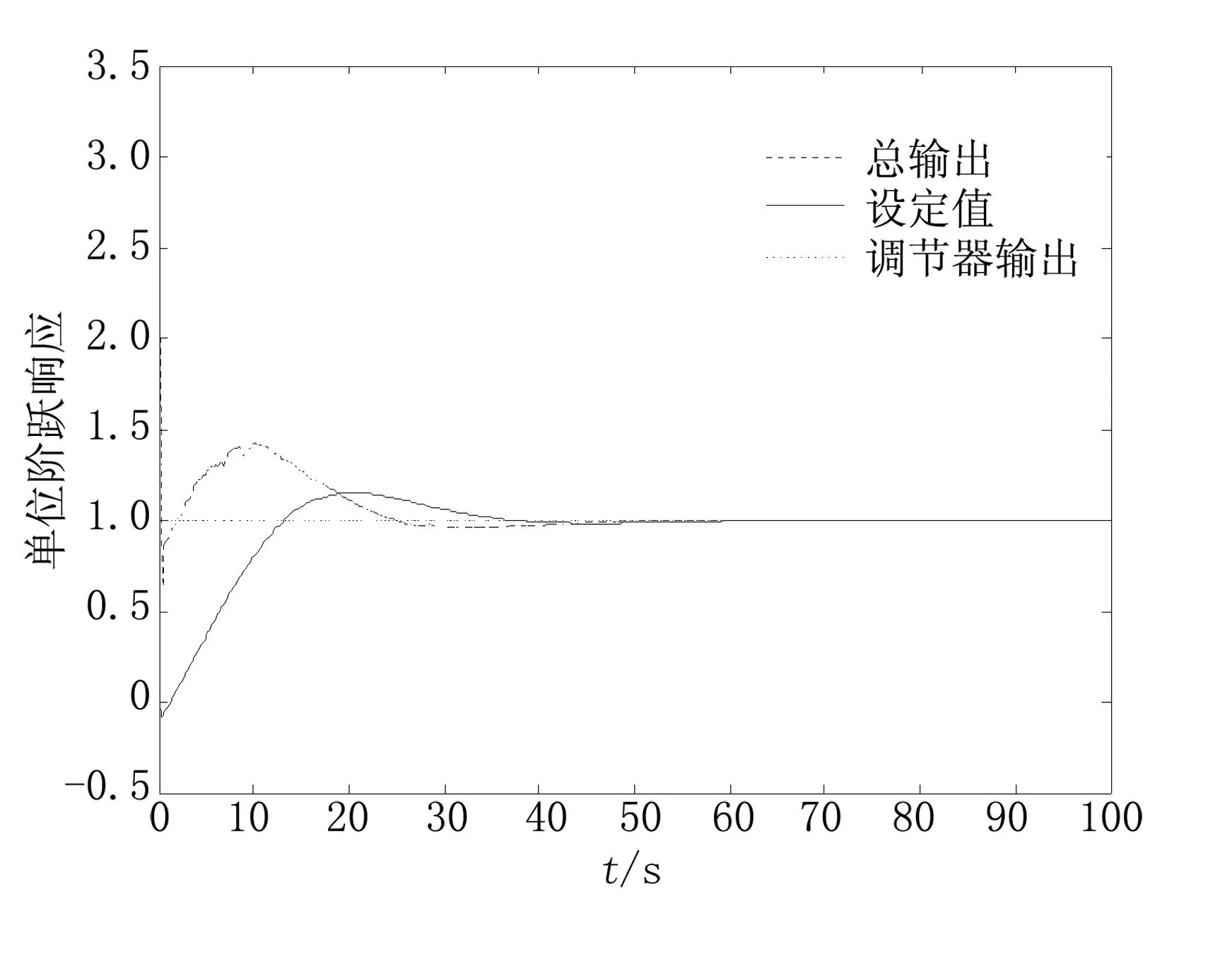
(a) 带自抗扰控制器频率给定阶跃响应
(b) 带自抗扰控制器功率扰动阶跃响应
PID和自抗扰数据比较分析结果见表1。
将表1结果和常规PID相比,超调降低,反调减小,虽然牺牲了少许的调节时间,但是总体调节质量得到了大幅度地提高,证明了自抗扰调节器的先进性,可以解决PID调节器关于信号处理上的缺陷问题,使控制达到更好的效果。
表1PID和自抗扰数据比较分析结果

项目超调量/%调节时间/s反调量/sPID403020自抗扰20708
(a) 被控对象参数变化后带自抗扰控制器频率给定阶跃响应
(b) 被控对象参数变化后带自抗扰控制器功率扰动阶跃响应
4结束语
水轮发电机调速系统是一个典型的非最小相位系统,且电网负荷的变化会给水轮机调速系统带来较大的扰动,从而对系统的稳定性产生较大影响,使用常规PID控制方式难以保证良好的控制效果。将自抗扰控制引入水轮机调速系统的控制,可有效抑制系统的超调、减小负调并缩短调节时间,仿真结果表明:在系统工况发生变化时,控制效果仍然很好,具有较强的鲁棒性。
参考文献:
[1]郑源,陈德新.水轮机[M].北京:水力水电出版社,2001.
[2]潘峰,李天智.三峡左岸电站水轮机调速器的特点和运行分析[J].水力自动化与大坝监测,2007,31(2):33-35.
[3]韩京清. 自抗扰控制技术[J].前沿科学,2007,1(1):24-31.
[4]张翼,邱晓燕. 水轮机调速器的模糊自适应PID控制[J],大视野,2008, 1(9):118-119.
本文责任编辑:杨秀敏
Simulation Analysis on Active Disturbance Rejection Controller Applies inHydraulic Turbine Generator System
Yao Yabin1,Wang Lijie2,Shao Lina1
(1.Hebei Electric Power Design and Research Institute,Shijiazhuang 050031,China; 2.State Grid Hebei Electric Power Research Institute,Shijiazhuang 050021,China)
Abstract:The method of introducing active disturbance rejection control (ADRC) into hydro turbine speed governing system is proposed to cater for the governing characteristics of hydro turbine.It illustrates the theory of hydro turbine governing system, analyzes the features of ADRC,and builds simulation model with ADRC.Comparing with conventional PID simulation result,it shows that ADRC can improve the control quality of hydro turbine system effectively and is worthy of putting into practice in projects.
Key words:ADRC,hydro turbine,speed governing system,speed governor,simulation
收稿日期:2016-02-24
作者简介:要亚斌(1979-),男,高级工程师,主要从事电厂热控自动化专业设计研究工作。
中图分类号:TK730.17
文献标志码:A
文章编号:1001-9898(2016)03-0053-04