基于H-/H∞优化的风力发电机组传感器故障检测
2016-06-25李东亮文传博
李东亮, 邓 露, 王 磊, 文传博
(上海电机学院 电气学院, 上海 2001306)
基于H-/H∞优化的风力发电机组传感器故障检测
李东亮,邓露,王磊,文传博
(上海电机学院 电气学院, 上海 2001306)
摘要建立了风力发电机组在干扰和传感器故障条件下的状态模型,并考虑了系统对故障的灵敏度和对干扰的鲁棒性,分析了H-/H∞优化方法下观测器增益的存在条件,结合线性矩阵不等式(LMI)方法与迭代算法,构造了一种最优故障检测系统。仿真结果表明,所设计的观测器对故障具有高灵敏度,同时又对干扰具有强鲁棒性,能有效地检测出传感器故障。
关键词风力发电机组; 传感器; 线性矩阵不等式; 故障检测
随着地球上化石能源的不断减少,气候与环境的持续恶化,人们越来越重视新能源的发展。风能作为一种可再生的绿色能源,已经得到了广泛开发与应用。近些年来,在我国政策鼓励和低碳环保的要求下,风力发电机组的装机容量和市场占有量都有了飞速增长[1-2]。
由于我国资源分配不均,风力发电机组多被安置在较恶劣的环境中,故对风力发电机组本身的性能提出了很大的挑战。为了将风能最大程度地转化为电能,风力发电机组中必须使用速度控制器和功率控制器以优化风轴转速,保持其最大的功率输出。传感器作为这些控制器中重要的组成部分,在测量风速、有功功率和发电机转速等方面都发挥着无可替代的作用。因此,为使风力发电机组高效运行,避免重大事故发生,及时、准确地检测出传感器的故障显得尤为重要。
基于解析模型的故障诊断主要是建立系统的、较为精确的数学模型,将模型系统的输出值和实际系统测量输出值相比较取得残差,通过对残差的分析来确定所发生的故障。但在实际的复杂系统中,由于模型的不确定性、未知输入和参数的变动都会引起残差的变化,进而导致基于模型的故障诊断错报情况屡见不鲜,故当系统发生小故障时,很难做出正确诊断,因为这要求系统对干扰有较强的鲁棒性,同时对故障有较高的灵敏度;因此,设计出干扰对残差影响较小,且故障对残差影响较大的系统模型成了关注的方向。
H∞范数被广泛用于评价故障检测系统中干扰的鲁棒性能;在固定频段内其对故障具有最高的灵敏度,但同时对干扰有最差的鲁棒性,是对故障灵敏度最好情况的一种评价[3-4];相对H∞范数[5]而言,H-指数是对故障灵敏度最差情况的一种评价。综合了上述两种方法的优点,文献[6]中提出了H-/H∞优化方法,并将其转化为约束的H∞问题;文献[7]中针对H-/H∞优化问题,通过约束的线性矩阵不等式(Linear Matrix Inequality, LMI)结合迭代算法,实现了系统对故障的高灵敏度和对干扰的强鲁棒性。
本文分析了双馈风力发电机组工作原理,给出了传感器故障的系统线性化数学模型;结合H-/H∞优化方法,通过LMI结合迭代算法说明了所设计的观测器对故障有较高的灵敏度,同时对干扰有较强的鲁棒性。
1风力发电机组模型
一般而言,双馈风力发电机组主要由风力发电机的空气动力学模型、风力发电机组的轴系模型(包括风力机轴、齿轮箱和发电机轴)、桨距角控制模型、发电机模型及其控制保护系统等部分组成[8-12]。双馈风力发电机组的动态模型如图1所示。

图1 双馈风电机组动态模型框图Fig.1 Dynamics of doubly-fed wind turbines
图中,v为实际风速;vm为风速测量值;β为桨距角;βref为桨距角参考值;ωg为发电机实际转速;ωg_m为发电机测量转速;ωr为风轴实际转速;ωr_m为风轴测量转速;Pg为发电机实际功率;Pref为发电机功率参考值;Tr为风轴实际转矩;Tr_ref为风轴扭矩的参考值;Tg为发电机实际转矩;Tg_m为发电机转矩测量值。
风力发电机组各子模块通力协作,使其处于正常的工作状态。考虑到传输转矩、传感器故障和干扰的影响,在工作点处各子模块相互作用的非线性模型可线性化[8]。其线性化模型为
(1)
式中,x∈R5、u∈R、y∈R、d∈R2、f∈R分别为系统的状态变量、控制输入、测量输出、扰动信号和加性传感器故障;A,B,C,D,Ed,Fd和Ff为已知的适维矩阵;θ为二次轴相对角;UI为电网电压;θ为二次轴相对角速度。
在u=0的条件下,假设系统的采样误差与通信误码较小,可忽略。将不可控因素,如风速、电网电压看作干扰,讨论系统在干扰条件下的传感器故障检测。以400kW的双馈风力发电机组为例,选择工作点风速v=10m/s,电网电压UI=690V,其相关的状态空间模型矩阵为[8]


2H-/H∞优化设计方法
线性不变动态系统的状态空间描述为
(2)
式中,x∈Rn、u∈Rkn、d∈Rkd和f∈Rkf分别为系统的状态变量、控制输入、测量输出、扰动信号和加性故障,其中,n、kn、kd、kf为维数;A、B、C、D、Ed、Fd、Ef和Ff为已知的适维矩阵。
本文对线性不变动系统做如下假设:
(1) (CA)是可检测的;
(2) (CFd)是行满秩;
为实现残差生成,故设计以下观测器:

(3)

(4)
r还可描述为
r=Trdd+Trff=rd+rf
其中,rd为干扰对残差的影响;rf为传感器故障对残差的影响;干扰对残差的传递矩阵为
Trd=C(sI-A+LC)-1(Ed-LFd)+Fd
故障对残差的传递矩阵为
Trf=C(sI-A+LC)-1(Ef-LFf)+Ff
s=jω,其中,ω为频率。
r对模型不确定性等未知输入的抑制可用H∞范数描述为

(5)
(6)
式中,γ为d(t)对r(t)最差情况下的鲁棒性评价;γ越小,r对未知输入的抑制能力就越强。
r对故障灵敏度的测量用H-指数描述如下:

(7)
系统灵敏度指标可描述为

(8)
β→max
式中,β为f(t)对r(t)的影响在最差情况下的灵敏度测量,β越大,残差生成器对故障越灵敏,作用在残差上的可检测故障信息越多。
在设计观测器时,所取的增益L必须使观测器稳定,同时,尽可能地减少干扰对残差的影响,增大故障对残差的影响,即增强系统对干扰的鲁棒性,以提高对故障的灵敏度,因此,对故障的灵敏度问题就可描述为约束条件下H-/H∞的优化设计。

minJ=γ/β,γ→min,β→max
(9)
引理1[7]对于线性不变动态系统(式(2))及观测器(式(3)),若存在γ≥γmin、对阵矩阵P>0以及矩阵Lγ,使以下LMI成立:

(10)
则基于观测器的故障检测鲁棒性问题是可解的,且L=P-1Lγ,γmin>0为满足式(10)中γ的最小值。
定理1对于线性不变动态系统(式(2))及观测器(式(3)),若存在β≤βmax、对阵矩阵Q>0以及矩阵Lβ,使以下LMI成立:

(11)
则基于观测器的故障检测灵敏度问题是可解的,且L=Q-1Lβ,βmax>0为满足式(11)中β的最大值。
证明由式(4)可得到
(12)
(1) 由式(12)定义一个Lyapunov函数


并计算
其中,
且

(3) 由0<β≤βmax,可得式(11)成立。
定理2给定两个变量γ≥γmin和β≤βmax,β>γ>0,若存在矩阵Lγ、Lβ和对称矩阵P>0、Q>0,使系统稳定,并满足L*=P-1Lγ=Q-1Lβ,并使式(9)和(10)都成立,则基于H-/H∞优化的观测器故障检测问题是可解的[13-15]。
证明根据引理1,可以得到满足式(6)的最小值γmin、对于任意γ≥γmin,均存在P>0和观测器增益阵Lγ=P-1Lγ,使式(10)成立。同时,由定理1可得满足式(8)的最大值βmax;对于任意β≤βmax,也存在Q>0和观测器阵Lβ=Q-1Lβ,使式(11)成立。对于γ和β在γmin≤γ≤β≤βmax内取值,当L*=P-1Lγ=Q-1Lβ时,式(10)和(11)必须同时成立,故结论成立。

3仿真分析
以400kW双馈风力发电机组为例,根据风力发电机系统(1),通过上述迭代算法可以得到:
最优性能指标J=0.625,A-L*C的特征值为-100,-654.46,-360.12,-3.56+2.45i,-3.56-2.45i,所设计的观测器稳定。
本文利用MATLAB中Simulink建立了系统仿真模型图(见图2),通过设置各参数的值,在干扰和传感器故障情况下,通过观测模型输出与实际模型输出的对比来确定传感器故障。仿真实验中,选择工作点风速v=10m/s,电网电压UI=690V,加入方差为0.1的高斯白噪声,在第 40s 时功率传感器发生幅值为额定功率5%和20%的阶跃型故障。
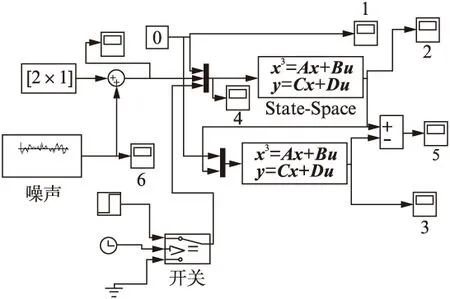
图2 Simulink仿真图Fig.2 Diagram of Simulink simulation
在干扰和传感器故障情况下,比较观测模型输出值与实际系统输出值,从而得出功率传感器发生不同阶跃故障时的残差图,如图3所示。


图3 不同阶跃型故障下,基于H-/H∞优化的故障残差图Fig.3 Fault residual under different step faults based on H-/H∞ optimization
由图可见,H-/H∞优化方法可以限制干扰对残差的影响,同时可以有效地诊断出传感器的故障。与文献[8]中方法相比,更能有效地实现风电机组对的可靠运行控制。
4结语
本文通过采用H-/H∞优化方法对风力发电机组传感器故障进行检测,在保证所设计观测器稳定的前提下,结合迭代算法求解鲁棒性与灵敏度最优平衡情况。该方法达到了检测系统对故障更加灵敏,同时对干扰更加鲁棒的最佳平衡,仿真结果验证了所采用的设计方法和算法能够有效地检测出风力发电机传感器故障。
参考文献
[1]祝贺,徐建源,张明理,等.风力发电技术发展现状及关键问题[J].华东电力,2009,37(2): 314-316.
[2]王成富.风力发电研究现状及发展趋势探讨[J].低碳世界,2013(20): 63-64.
[3]吴敏,桂卫华.现在鲁棒控制[M].长沙: 中南大学出版社,1998: 45-65.
[4]DING S X.Model-based fault diagnosis techniques[M].London: Springer-Verlag,2013: 21-46
[5]QIU Z,GERTLER J.ROBUST FDI systems andH∞optimization-disturbances and tall fault case[C]∥Proc edings of 32rd IEEE Conference on Decision and Control.San Antonio,Texas: IEEE,1993: 1710-1715.
[6]HOU M,PATTON R J.An LMI approach toH-/H∞fault detection observers[C]∥IEE Proceedings of the UKACC International.Conference on Control ’96.[S.L.]: IET,1996: 305-310.
[7]TAO Peng,DING S X,GUI Weihua,et al.An optimal approach toH-/H∞fault detection filters design[J].Dynamics of Continuous,Discrete and Impulsive Systems B: Applications & Algorithms,2005(2): 215-224.
[8]Bongers P M M.Modeling and identification of flexible wind turbine and a factorizational approach to robust control design[D].Hetherland: Delft University of Technology,1994: 225-262.
[9]AKHMATOV V.风力发电用感应发电机[M].《风力发电用感应发电机》翻译组,译.北京: 中国电力出版社,2009: 80-110.
[10]叶杭冶.风力发电机组的控制技术[M].北京: 机械工业出版社,2002: 50-65.
[11]TAPIA A,TAPIA G,OSTOLAZA J X,et al.Modeling and control of a wind turbine driven doubly fed induction generator[J].IEEE Transactions on Energy Conversion,2003,18(2): 194-204.
[12]SPERA D A.Wind turbine technology[M].New York: ASM Press,1994: 399-419.
[13]ZHONG Maiying,DING S X,TANG Bingyong,et al.An LMI approach to design robust fault detection observers[C]∥Proceedings of the 4th World Congress on Intelligent Control and Automation.[S.L.]: IEEE,2002,4: 2705-2709.
[14]CHEN B S,TSENG C S,UANG H J.MixedH2/H∞fuzzy output feedback control design for nonlinear dynamic systems: an LMI approach[J].IEEE Transactions on Fuzzy Systems,2000,8(3): 249-265.
[15]ZHONG M,DING S X,LAM J,et al.An LMI approach to design robust fault detection filter for uncertain LTI systems[J].Automatica,2003,39(3): 543-550.
Fault Detection of Wind Turbine Sensor Based onH-/H∞Observer Optimization
LI Dongliang,DENG Lu,WANG Lei,WEN Chuanbo
(School of Electrical Engineering, Shanghai Dianji University, Shanghai 201306, China)
AbstractThis paper proposes a state space model of wind turbine disturbance under the condition of interference and sensor fault. The model takes into account robustness to disturbances and sensitivity to fault. The existence conditions of observer gain when using the H-/H∞optimization are analyzed, and the linear matrix inequality (LMI) method and iterative algorithm are used. The constructed detecting system is optimal. Simulation results show that the designed observer is highly sensitive to fault and robust against disturbances, and therefore can effectively detect the sensor fault.
Keywordswind turbine; sensor; linear matrix inequality; fault detection
收稿日期:2015-10-18
作者简介:李东亮(1992-),男,硕士生,主要研究方向为风机故障诊断,E-mail: 1278451173@qq.com
文章编号2095-0020(2016)02-0094-05
中图分类号TP 212;TP 277.3
文献标志码A
