集装箱智能大门设计与研究
2016-05-31高延鹏李小平
高延鹏 李小平

摘 要:文章从集装箱中心站车辆出入数据的采集与管理入手,对智能大门进行设计与研究。设计了集装箱智能大门的一种可行性方案,以提高通行的效率以及确保数据的更加安全准确。论述了集装箱中心站智能大门总体方案并对关键技术的实现进行研究,旨在设计一套开放性、先进性、可扩展性、易维护性集装箱智能大门。
关键词:智能大门;集装箱管理;通行效率;设计;研究
中图分类号:F253.9 文献标识码:A
Abstract: This paper designs and researches the smart gate starting from the data acquisition and management of vehicle access in the container terminal. And designs a feasible plan for smart gate in the container to improve traffic efficiency and make the data more safe and accurate. This paper discusses the overall plan of smart gate in the container terminal and researches the realization of key technology so as to design a set of smart gates in the container terminal, which are open advanced, extensible, and easy to be maintained.
Key words: smart gate; container management; traffic efficiency; design; research
0 引 言
集装箱大门作为集装箱中心站与运输车辆交接的门户,其通行的效率以及数据的安全准确是至关重要的。而传统的人工和半自动化系统实现数据的采集与管理已不能满足要求。为了满足发展的需要,集装箱智能大门系统作业必须实现自动化、运行智能化、服务信息化、管理科学化的目标。
目前,集装箱智能大门系统已成功应用于我国多个港口码头,未来,随着我国自动化集装箱码头的发展,集装箱智能大门的应用范围将进一步扩大[1]。许多学者对集装箱智能大门进行了研究:彭传胜[2]介绍了国外集装箱中心各种已经应用或者将被开发应用于大门上的技术,包括EDI、码头运作系统(TOS)、视频系统、OCR技术、RFID设备、磁卡、电子标志桥、通道联络设备、电子称重技术、移动数据终端以及电子门封等,供国内集装箱中心站及相关人员借鉴;蔡忠义[3]介绍了晋江围头港集装箱货运码头智能闸口管理系统的开发背景、当前国内外关于智能闸口管理系统的研究现状;刘旭[4]在港口现运行作业系统基础上,对闸口业务流程及管理需求重新分析,以智能化思想重新规划、设计闸口系统,以建立智能化、稳定、可靠地智能闸口系统;甫雨[5]盘点了近年来涌现出的智慧码头新技术,描述智能闸口是将RFID、OCR、CCTV、LED、EDI与实时控制等先进技术予以有机的结合,完成对集装箱码头出门闸口管理和控制的智能化;任玥[6]在现有集装箱码头闸口系统基础上,分析了智能闸口的实际需求和业务流程,并结合客户关系管理的思想,设计和实现了集装箱码头智能闸口系统。上述研究主要介绍了集装箱智能大门的各种功能及技术进行说明,对关键技术实现以及方法的描述较少。本文将依据现有技术设计装箱智能大门一种方案,并对其图像采集和箱号识别中关键技术与实现进行研究。
1 集装箱智能大门总体技术方案
1.1 总体方案
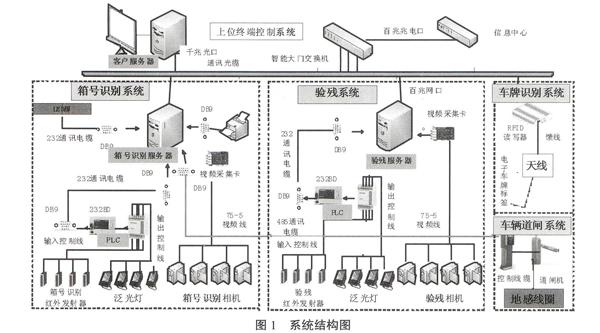
集装箱智能大门的功能与集装箱移动操作与操作的记录有关。具备集装箱箱号自动识别、电子车牌信息自动读写、人工远程对集装箱箱体残损的检验等功能。系统结构图如图1所示。
(1)箱号识别系统
箱号识别系统设置工控机、摄像机、图像采集卡、信号控制卡、红外触发器和泛光灯等设备,自动采集符合国际标准箱图片。通过后台软件对采集图片分析能够自动识别单行、多行或竖行排列的各种格式集装箱箱号。
(2)箱体验残系统
设置工控机、摄像机、图像采集卡、信号控制卡、触发器和泛光灯等设备。采用高清摄像机进行集装箱箱体图像采集,供人工远程进行箱体残损检查。
(3)车牌识别系统与电子档杆系统
设置电子车牌、RFID读写器、RFID天线车辆检测器和地感线圈等设备采集集装箱牵引车车号。设置与计算机联网的触发信号、车辆检测器和地感线圈可实现人工和自动挡车。
1.2 工作流程
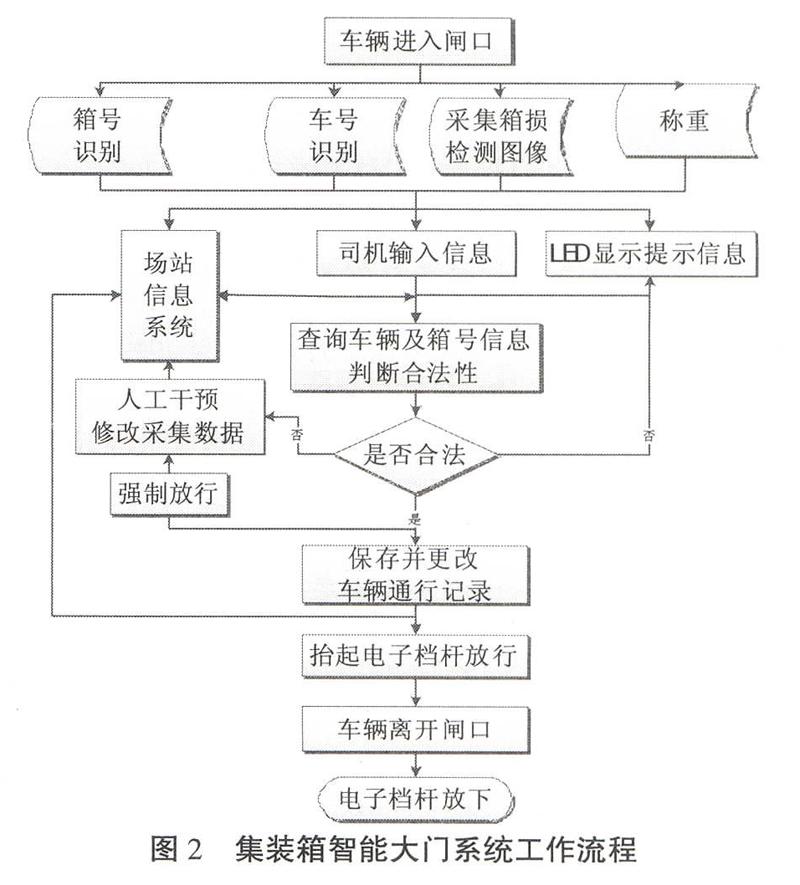
当集装箱车辆进入闸口时,车辆触发地感线圈和遮挡触发红外传感器。判断是否需要进行箱号识别、验残图片采集,同时车牌识别系统将识别车牌信息。如果有集装箱进入,则进行识别和验残图片采集并将识别结果同车牌信息送到闸口应用服务器。此时集卡停在一体化人机交互机柜旁,地磅系统自己获取车辆信息,司机通过人机交互系统进行提箱和进箱操作,同时操作人员通过验残监测系统检查集装箱箱体,将验残结果反馈到闸口应用服务器内。综合以上信息,闸口应用服务器从数据库中提取相应箱号的作业计划,通过获取信息与上位终端车辆及箱号信息数据处理,将此信息送到人机交互系统输出,司机根据打印出的小票信息进行相应处理。
集装箱智能大门工作流程如图2所示:
2 关键技术与实现
2.1 基于视频采集卡图像采集技术
(1)工作原理
视频采集卡[7](Video Capture Card)作为视频监控系统的核心部分, 完成视频的采集、压缩和处理功能。视频图像经多路切换器、解码器、A/D变换器,将数字化的图像数据送到数据缓冲器。经裁剪、比例压缩及数据格式转换后,由内部RISC控制图形覆盖与数据传输,数据传输于工控机。工控机对PLC信号对视频进行抓取图片并将图片送往上位客户端。视频采集卡工作原理如图3所示。
(2)PLC与上位软件控制相机方法
箱号识别图片与验残图片,是通过软件控制视频采集卡来进行采集。视频采集卡上的AV视频端口与相机连接:定义视频采集卡的通道1口连接连接相机1,即箱号识别视频采集卡的通道1连接箱号识别X1相机,验残视频采集卡的通道1连接验残相机Y1,以此类推连接X2、X3、X4和Y2、Y3、Y4。上位软件控制视频采集卡对图像进行图片的抓取和相应操作。而对于何时如何拍照的判断过程是由PLC系统完成。上位软件通过与PLC的协议进行控制相机进行拍照。
定义相机的拍照相机命令为1,相对相机不需要拍照的命令为0。以相机X1、X2、X3、X4与Y1、Y2、Y3、Y4的命令逻辑状态组成4位二进制数据。通过PLC的RS指令将相机拍照命令通过D200寄存器发送给PC工控机,上位软件通过扫描串口数据读取D200发送的数据。6对红外对射开关,代号分别为:A1、A2、A3、A4、B1、B2。对射开关动作为0或1——当条件为1时触发器接通,反之0时触发器被遮挡。其触发状态标志是逻辑0,接通标志状态是逻辑1;PLC通过红外触发器的逻辑状态来进行集装箱车类型及位置判断。表1为标准车三种情况下,箱号识别PLC与上位软件控制相机通信协议。
(3)采集过程
当一辆载有集装箱的卡车通过通道的大门时,因为红外触发器的高度小于集装箱上沿的最低高度,所以在卡车前行的过程中会发生遮挡和连通的两种状态,图像拍摄就是利用这两种状态的变化来判断触发快门的时机。这里以箱号识别图像采集过程介绍系统图像采集方法。箱号识别拍照流程如图4所示。
当车上装载的集装箱为双箱时,在车行进过程A3、A4红外触发器先后由接通变为遮挡时,同时后面的A1、A2两对红外触发器都被遮挡,则X1、X2、X4同时被触发,即拍到双箱前箱的前侧图、左侧图和右侧图。行进过程中A1、A2两对红外触发器由遮挡变为接通时,同时前面的A3、A4两对红外触发器被遮挡,则相机X2、X3、X4同时被触发,由图像采集卡采集这三路通道的图像,即拍到双箱后箱的左侧图、右侧图和后侧图。当车上装载的是集装箱长箱时,在车行进过程中前面的两对红外触发器A3、A4先后由接通变为遮挡时,同时后面的A1、A2两对红外触发器都被遮挡,则相机X1、X2同时被触发,由图像采集卡采集这两路通道的图像,即拍到集装箱长箱的前侧图和左侧图;在车行进过程中后面的A1、A2两对红外触发器由遮挡变为接通时,同时前面的两对红外触发器被遮挡,则相机X3、X4同时被触发,由图像采集卡采集这两路通道的图像,即拍到集装箱长箱的后侧图和右侧图。当车上装载的是集装箱短箱,在车行进过程中后面的X1、X2两对红外触发器由接通变为遮挡时,同时前面的两对红外触发器被接通,则相机X1、X2、X3、X4同时被触发,由图像采集卡采集这四路通道的图像同时确认为短箱,即拍到集装箱短箱的前侧图、左侧图、右侧图和后侧图。
2.2 基于OCR集装箱箱号识别技术
(1)OCR箱号识别技术
光学字符识别[8-9](Optical Character Recognition,OCR),OCR技术是通过扫描等光学输入方式将各种现实场景转化为图像信息,再利用文字识别技术将图像信息转化为计算机可以使用的数字信息,通过图像处理相关技术及模式识别进行识别的技术。箱号识别实现是一个基于数字图像处理技术箱号识别系统,是模拟人工识别箱号的过程进行设计的[10]。箱号识别流程如图5所示。
图像采集设备采集图像为24位彩色图像,在进行识别时的图像为灰度图像。所以图像预处理要将采集彩色图像处理为灰度图像。灰度值同RGB颜色关系为:I=0.299×R+0.587×G+0.114×B,其中0.299、0.587、0.114是人眼对红、绿、蓝(R、G、B彩色图像三个分量)三个颜色敏感度。图像处理成灰度图像后要对图像进行去噪处理,去噪方法为中值滤波[11]。箱号定位处理前包括边缘检测、二值化等处理,字符定位是基于图像分割为基础、基于边界追踪方法。
其中字符识别是其中的关键技术,字符识别是其中的功能模块,字符识别包括三类:模板匹配法[12]、特征统计匹配法[13]和神经网络法。常用的神经网络有BP神经网络、RBF 神经网络、Hopfield 神经网络等,其对于字符的噪声及变形不敏感,但是特征参数过多会增加训练时间,过少会引起判断上的歧义,网络的待处理信息量大,产生的网络结构比较复杂,输入模式维数的增加可能导致网络规模庞大,运算量大,实用性太差[14]。本文采取模板匹配与特征匹配结合的匹配算法,并且对集装箱图像多个图像(前、后、左、右至少三个)识别,来实现识别高效率与准确率。
(2)箱号识别实现
集装箱箱号自动识别系统前台部分主要由图片信息采集设备、红外触发器等,后台部分主要是处理软件等。根据不同特征对不同字符的识别率不同,根据实验结果得出一系列权值,根据模板匹配的结果选择权值,将字符的所有识别结果进行加权得出识别结果。
为实现识别高效率和高准确性,本设计采用多图像识别。多图像识别的过程从系统流程来讲主要有三个步骤,分别是建立队列、单图像识别、多结果校验。建立列队,识别队列采用串行的工作方式,主要原因是图像分析处理对于CPU而言是占用率极高负担很重的任务,采用并行的多幅图像识别只会在系统切换线过程中间白白的浪费时间,不会提高整体性能,而采用串行识别的方法还可以采用利用识别结果进行的提速技术;单图像送入识别器进行图像解码、图像处理、号码分割、字符识别、结果组装,最后利用最大可能性输出可以识别的集装箱号码。输出的结果中包含色彩、排列、位置等大量处理中间信息,为多结果的校验做准备;通常集装箱可以拍摄到四个侧面的图像,但是这些图像可能部分甚至全部因为长期使用刮擦和污渍造成的某些字符损坏无法辨认或者破损过于严重导致切分错误,这就需要对多个识别结果采用多结果冗余校验的技术进行检查和纠正,而且可以判断出当前车辆承载的是一个还是两个集装箱。生成的结果作为集装箱识别的最终结果。
3 应用实例分析
针对某国际集装箱中心站,引用上述方法。选定图像采集卡:大恒 DH-VT140;PLC:FX3SA-14MR-CM;摄像机:三星SCB-4000P(腾龙镜头12VG412ASIR);工控机:研祥IPC-810BDE等设备实施。如图6所示,左边是集装箱残损检测系统主界面;右边集装箱箱号识别识别主界面。
4 结束语
本文结合实际问题对集装箱智能大门总体做了简单描述。重点对图像采集与箱号识别进行研究。介绍图像采集常见方法,详细介绍了图像采集过程中视频采集卡、PLC的工作原理及方法,该过程主要特点是具有较高可靠性。在箱号识别中,采集多个同一箱号字符识别结果进行多结果校验,可实现箱号识别准确率达99%以上。
参考文献:
[1] 舒帆,宓为建,李勋. 集装箱码头智能闸口功能分析及配置设计[J]. 集装箱化,2014(12):23-26.
[2] 彭传圣. 集装箱码头大门的设计(二)[J]. 集装箱化,2003(12):29-31,40.
[3] 蔡忠义. 围头港集装箱码头智能闸口的设计与实现[D]. 长春:吉林大学(硕士学位论文),2014.
[4] 刘旭. 集装箱码头智能闸口的设计与实现[D]. 济南:山东大学(硕士学位论文),2012.
[5] 甫雨. 新技术让集装箱码头更“聪明”[J]. 中国港口,2015(6):18-21.
[6] 任玥. 集装箱码头智能闸口的设计与实现[D]. 济南:山东大学(硕士学位论文),2011.
[7] 黄洁. 基于DSP与PCI的视频采集卡设计与实现[J]. 计算机测量与控制,2010(1):226-229.
[8] 荆涛,王仲. 光学字符识别技术与展望[J]. 计算机工程,2003(2):1-2,80.
[9] 瞿洋,杨利平. Hough变换OCR图象倾斜矫正方法[J]. 中国图象图形学报,2001(2):78-81.
[10] 陈永煌. 集装箱箱号识别技术的研究与实现[D]. 武汉:华中科技大学(硕士学位论文),2013.
[11] 赵高长,张磊,武风波. 改进的中值滤波算法在图像去噪中的应用[J]. 应用光学,2011(4):678-682.
[12] 朱庆生,杨世泉,柳锋. 基于图像边缘摘要的快速模板匹配[J]. 计算机应用研究,2009(2):792-794.
[13] 张二虎,冯江. 基于特征点的印品图像匹配算法[J]. 计算机工程,2008(23):202-204.
[14] 安博文,李丹,庞然. 基于边界模板匹配算法的集装箱箱号识别[J]. 科学技术与工程,2010(16):4043-4048.
