基于AVR单片机的GPS导航小车设计
2016-05-30黄睿
黄睿
摘 要: 首先对基于单片机的GPS导航小车进行了整体结构设计,说明了小车模型的意义,实现自动行驶功能;其次分别介绍了单片机控制器、GPS模块、无线传输模块和小车模型等硬件部分;再次对系统软件设计做了详细说明;最后对设计做了总结,实现了预期目标。
关键词: GPS导航; AVR单片机; 无线传输; 自动行驶
中图分类号: TP 967.1 文献标志码: A 文章编号: 1671-2153(2016)02-0086-03
0 引 言
GPS是英文Global Positioning System(全球定位系统)的简称,起源于美国并广泛应用于军事战争。近年来随着GPS技术的发展,其应用领域逐渐多元化[1],在国民经济生产中也发挥着重要作用,对于GPS技术在汽车方面的应用也成为了目前热门研究方向之一。随着家用汽车的普及、大气污染的日益加剧、恶劣环境下的自动驾驶功能就格外重要,而利用GPS导航恰恰可以解决这一难题。本文以自动导航小车为研究模型,探讨了车辆监控、自动驾驶的可行性,旨为工业化应用提供借鉴。
1 系统设计
本系统从功能上可以分为三个部分:定位、通讯和监控。在对小车GPS定位以后,通过无线网络进行数据传输,获取有效数据,即坐标和运行状态。GPS信号发送至GPS接收机,然后通过硬件实现信号处理,将处理后的信号发送到单片机控制端,提取数据,经过与预设值的比对和算法控制,实现小车的自动导航行驶。系统设计框图如图1所示。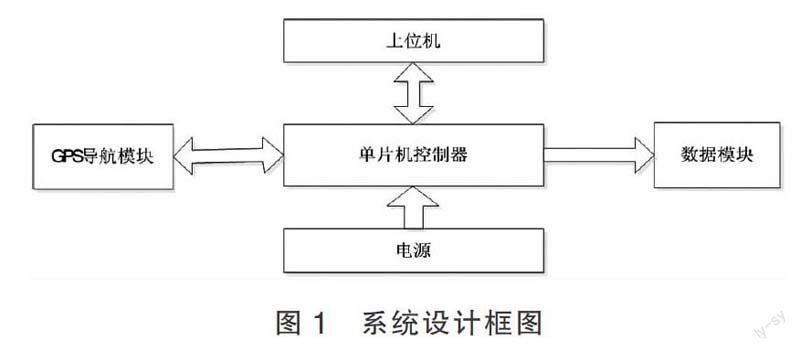
2 硬件设计
2.1 AVR单片机控制器
AVR是美国Atmel公司生产的增强RISC内在Flash的高性能8位单片机[2],它的串口可以同时与多模块通信,片内Flash程序存储器集成度非常高,可以大大减少外围元器件的使用,提高系统性能。这里选用AVR系列中性能最强大的ATmega128芯片[3],该芯片是一种性能高、功耗低的处理器,拥有64个引脚,可重复编程的Flash空间为128kb,4kb EEPROM,4kb内部SRAM[4]。具有优秀的RISC结构,内部有易失性的数据存储器和程序存储器、8路10位ADC,含有2个8位定时器/计数器、2个16位定时器/计数器、2路8位PWM和SPI,JTAG,USART等数据接口。
2.2 GPS模块
GPS模块采用环天BR-355,它具特殊轻巧造型及100%防水设计,使用SiRF Star III 芯片组加上内建的主动型陶瓷天线让定位更为精准,特别适合配合各种户外活动时使用,防滑的底部可方便运用在各种车辆、船只及航空器。小车通过GPS模块实现定位功能,GPS模块中核心单元为GPS接收机,GPS接收机在工作状态时会持续接收GPS导航定位信息,并将数据计算后通过串口上传到计算机中。GPS接收机包括主机和外设两部分。主机主要由射频RF、通信信道、数据存储与计算三大部分组成。外接设备主要包括电源、GPS天线、前置放大器和显示器。其结构框图如图2所示。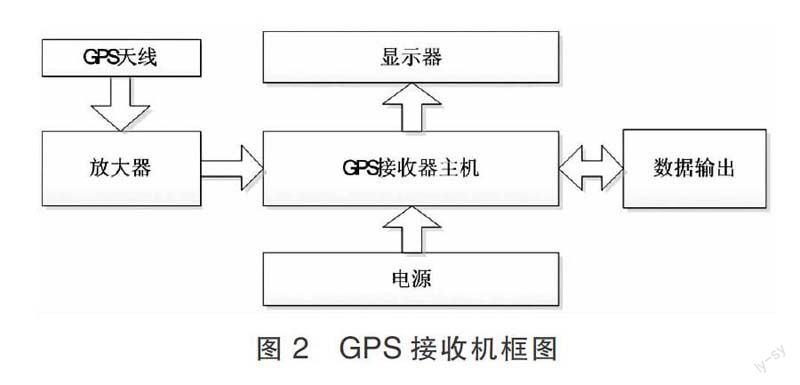
图2中,GPS模块通过天线接收卫星定位信号[5],提供对应数据,起到实时监控小车状态的作用,并把数据送给单片机控制器,通过程序的编译进行数据处理。
2.3 无线传输系统
整个监控系统中,上位机和单片机控制器以无线通信的方式传输数据。上位机通过无线传输模块给单片机发送控制指令,以及完成数据交换。系统框图如图3所示。
本系统采用AVR单片机和nRF24L01无线芯片,nRF24L01是一款工作在2.4~2.5GHz世界通用ISM频段的单片机无线收发器芯片,其具有数据传送量大、抗干扰能力强、稳定性好、耗能低等优点。通过单片机的10个I/O接口直接与nRF24L01相连。AVR单片机主要完成数据的采集和处理,向nRF24L01发送数据并且接收上位机通过nRF24L01传送过来的数据。无线芯片电源使用3.3 V供电,决定nRF24L01模块工作模式的引脚分别与单片机的相应I/O控制口相连,保证正常工作状态下,nRF24L01的工作模式可以由单片机内实时运行的程序来决定。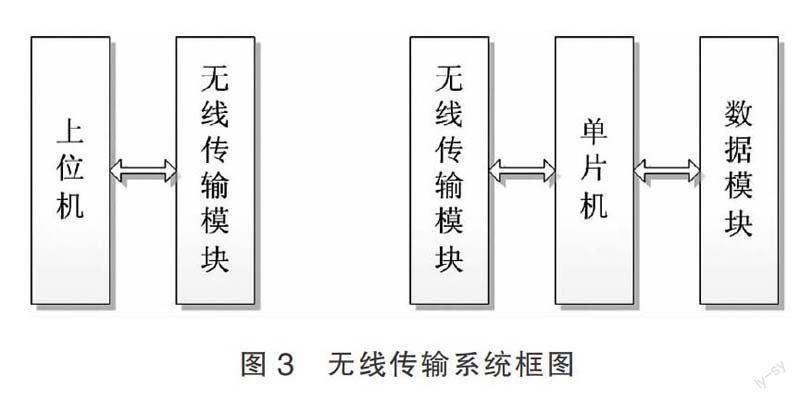
2.4 导航小车
本研究采用小车为自主组装模型,根据实验需求将车载模块安装在前驱小车模型内,通过单片机对集成芯片L298N的控制。L298N是一种双H桥电机驱动芯片,其中每个H桥可以提供2A的电流,由IN1~IN4引脚接收单片机的高低电平控制信号,ENA和ENB为使能端。用两个小电机分别连接小车的左前轮和右前轮,单片机指令控制电机的正传与反转,实现小车的运行状态调整。两个电机采用的是普通直流电机,其结构简单、调速性能好、过载能力强、可调范围宽,能够满足频繁切换电动机运行状态的实验需求。
3 软件设计
通过GPS模块来采集小车运行信息,根据参数对比,判断小车运行状态是否正常:如果符合预设值,保存数据并继续监控;反之,检查无线通信模块是否正常,如果有问题,返回初始状态,如果通讯无问题,报告给控制端进行调节。具体流程图如图4所示。
系统初始化主要包括控制器串行通信端口重点初始化、显示器初始化、GPS模块和无线模块初始化等。GPS数据先后经过接收、解析和显示三个处理阶段。系统采用的调试软件为ATMEL AVR Studio,该软件具有语言编译、程序下载、软件仿真和硬件仿真等功能,是与AVR单片机配套的集成环境汇编与开发调试软件。
系统的软件部分在自动控制原理中可视为一个闭环系统,根据小车实时的信息控制小车的运行状态,每次调整后会运行一个周期,然后进行第二轮的数据采集,判定以及小车的控制,直至达到系统平衡状态。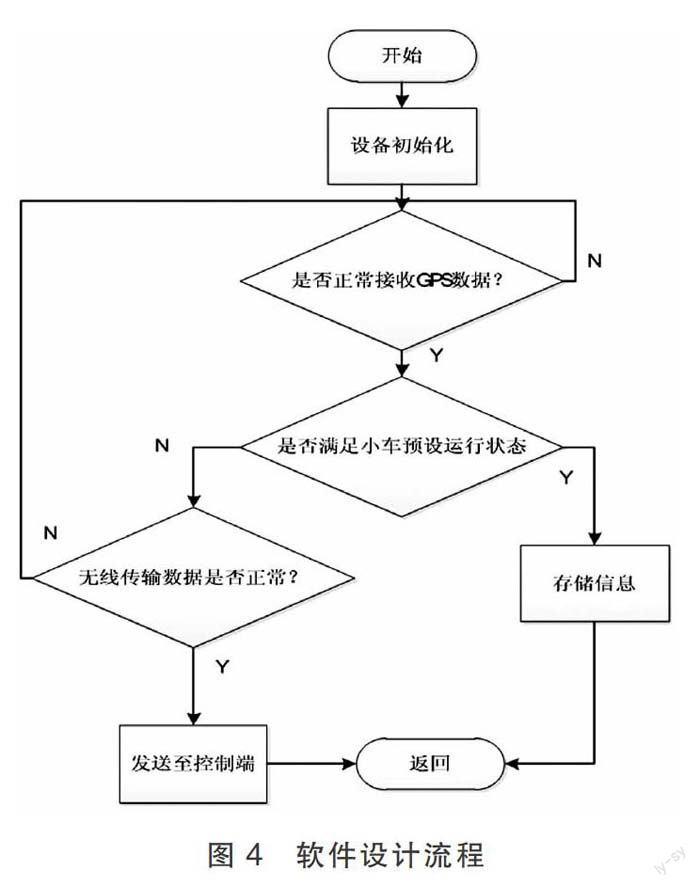
4 结束语
本文以GPS自动导航小车为模型,探索了车辆监控、自动驾驶的可行性。设计结果基本实现预期目标,但是在系统的精确性和快速性还有待改善。在以后的实验中,将会以多点监控为目标,实现群体控制。
参考文献:
[1] 白雪,徐雷钧,刘国海,等. 基于单片机的GPS定位信息采集系统[J]. 微计算机信息,2008,24(8):228-229.
[2] 宋建国. AVR单片机原理及应用[M]. 北京:北京航空航天大学出版社,1998.
[3] 刘海成. AVR单片机原理及测控工程应用[M]. 北京航空航天大学出版社,2008:4-5,72—75.
[4] 王勇. 基于AVR单片机的一体化GPS接收机设计[J].自动化仪表,2008(29):65-67.
[5] CHADIL N,RUSSAMEESAWANG A.KEERATIWINTAKORN PHONGSAK.Real-time tracking management system using GPS,GPRS and Google Earth[R]. 5th International Conference on Electrical Engineering/Electronics,Telecommunications and Information Technology,Thailand,2008:393-395.
(责任编辑:徐兴华)
