智能仿生踝足的研究进展及展望
2016-05-14杜婷婷宁祎杜挺豪
杜婷婷 宁祎 杜挺豪
摘 要:通过对国内外各机构对智能仿生踝足的研究进行总结,对仿生踝足的未来发展趋势进行展望。目前,对踝足的研究大多是基于残疾人穿戴的假肢,而用于仿人机器人的踝足研究少之又少,仿人机器人作为未来重要的发展对象,其仿生踝足的设计将成为智能仿生踝足的又一新的发展趋势。
关键词:假肢;仿生踝足;仿人机器人
引言
仿生技术在不断发展,假肢脚技术也在持续提高中。最近假肢研究人员认为要解决的关键而紧迫的问题是“模仿人类全部的脚踝行为”,这就有了仿生踝足的开发。大多数仿生踝足目前仍在研究开发水平,极少数装置已经商业化。
1 国外的发展
按照驱动方式,仿生智能踝足的研究可以分为液压型、气动型、电动型三种。
1.1 液压型
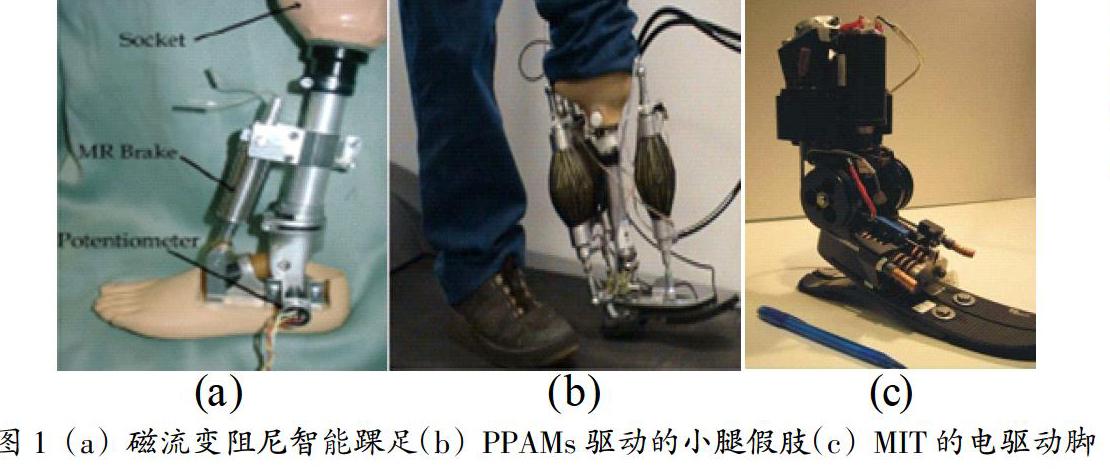
日本大阪大学某实验室的科研人员采用磁流变阻尼控制原理,开发了一种被动踝关节假肢[1],其主要结构是一个装有磁流变液的液压缸,结构简单,可无级调控,如图1(a)所示。在关节轴上安装有旋转型电位器,可以测量踝关节的角度,并把角度作为输入量,改变线圈电流,进而调整液压缸内磁场, 使踝足假肢背屈跖屈的阻尼遵循期望值改变,具有一定的智能。
1.2 气动型
Robotics&Multibody Mechanics research group研究小组(Vrije大学,布鲁塞尔,比利时),开发了装有百褶气动人工肌肉的小腿假肢原型[2],如图1(b)所示。假肢原型配备了三个PPAMs,1个放置在前面,2个放置在后面并行工作。仅用3bar肌肉的压力,就可以容易地实现200Nm的高力矩输出,脚踝运动范围也可以达到30度。作为第一台原型机,提供了一个概念验证和评估控制算法的测试平台,而气压动力和自主性方面问题尚未得到研究。
1.3 电动型
电驱动踝足假肢的研究工作大部分来自美国麻省理工学院(MIT)的Media实验室。这个实验室Hugh Herr领导的研究小组十几年来对仿生踝足的研究一直都在持续进行中。迄今MIT实验室已经制造了电动踝足假肢[3-5],如图1(c)所示,它能够模仿正常人体以自选的中等速度在水平地面行走过程中踝关节的生物力学行为。该系统使用一个SEA(串联弹性驱动器)提供正常行走所需要的动力,控制器设计采用微控制器和传感器结合的方法,用有限状态控制器进行控制。
2 国内的发展
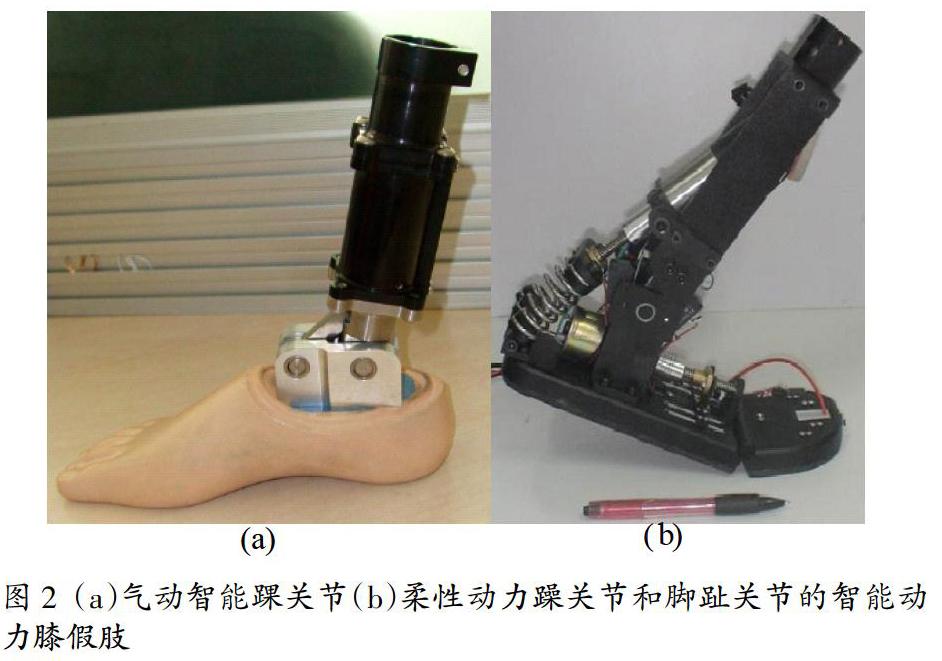
清华大学、河北工业大学和国家康复辅具研究中心三家单位合作,分工进行了阻尼可变式智能假肢踝关节的研究工作[6]。如图2(a)所示,这个假肢踝关节有一个针阀元件,针阀的大小控制着气室与大气之间的气体流动,从而控制活塞的往复运动,进而带动踝关节做跖屈或背屈运动,具有一定的智能性。
北京大学设计的柔性动力踝关节和脚趾关节的智能动力膝假肢[7]。如图2(b)所示,该踝足在踝关节处与跖趾关节处分别用一个SEA装置,其控制原理与MIT的Media实验室思路相同。
3 展望
由前所述,目前的研究大多还停留在假肢研究阶段,并且技术相对越来越成熟,但随着仿人机器人的发展,机器人的仿生踝足设计也将成为很多研究人员的重点目标。仿生踝足是仿人机器人与地面直接接触的支撑点,并在调整机器人姿态和稳定行走中发挥重要作用,因此对仿生踝足的研究是双足步行机器人技术中的一个难点。为仿人机器人双足步行开发仿生踝足,不是简单地对已有的踝足假肢结构直接移植使用,而是要根据仿人机器人的技术要求,有针对性地进行创新和改进。相信在不久的将来,机器人的仿生智能踝足设计将成为智能踝足的又一新的发展趋势。
参考文献
[1]Chengqiu Li, Miwa Tokuda, Junji Furusho, et al. Research and Development of the Intelligently Controlled Prosthetic Ankle Joint[C].IEEE International Confference on Mechatronics and Automation,2006:1114-1119.
[2]B. Vanderborght, D. Lefeber, F. Daerden, and M. Van Damme. Controlling a bipedal walking robot actuated by pleated pneumatic artificial muscles. Robotica[J].2006,V24(4): 401-410.
[3]S. K. Au, J. Weber, H. Herr. Powered Ankle-Foot Prosthesis Improves Walking Metabolic Economy[C]. IEEE Transactions on Robotics,2009,V25(1):51-66.
[4]Jing Wang, Oliver A Kannape Hugh M Herr. Proportional EMG Control of Ankle Plantar Flexion in a Powered Transtibial Prosthesis[C]. International Conference on Rehabilitation Robotics (ICORR), 2013.
[5]David Hill, Hugh Herr. Effects of a powered ankle-foot prosthesis on kinetic loading of the contralateral limb: A case series[C]. IEEE Int. Conf. On Rehabil and Robot,2013.
[6]杨鹏,柏健,王欣然,等.基于有限状态机控制的智能假肢踝关节[J].中国组织工程研究,2013,17(9):1549-1554.
[7]Jingying Zhu, Qining Wang, Long Wang. Biomechanical Design of powered Ankle-foot Prosthetic witlh Compliant Joints and Segmented foot.
