一种基于信息融合的指纹奇异点提取及纹型分类算法
2016-05-09彭小奇钟云飞
张 晔 彭小奇,2 钟云飞 唐 英
一种基于信息融合的指纹奇异点提取及纹型分类算法
张 晔1彭小奇1,2钟云飞3唐 英1
1(中南大学物理与电子学院 湖南 长沙 410083)
2(湖南第一师范学院信息科学与工程系 湖南 长沙 410205)
3(中南大学信息科学与工程学院 湖南 长沙 410083)
准确可靠地实现纹型分类对提高大容量指纹库中的检索和匹配效率具有重要意义。提出一种基于信息融合的指纹奇异点提取与纹型分类算法。首先,分别给出一种基于奇异点区域方向场信息和奇异区复数滤波场信息的改进的奇异点提取算法,并将两者融合以完整提取奇异点;再利用所提取奇异点邻域的Gaussian-Hermite矩的分布属性剔除伪奇异点;最后,利用奇异点的数目和位置关系及中心点的主方向将指纹分为常见的六种纹型,对缺少三角点的指纹,使用脊线跟踪算法进行分类。实验表明,该方法新颖有效,具有较高的准确性和鲁棒性。
指纹 奇异点 信息融合 主方向 分类
0 引 言
个人身份识别是信息化社会正常运行不可或缺的基础性技术,指纹因其唯一性而在个人身份识别中得到广泛应用。随着自动指纹识别系统中的指纹数据库的规模日益庞大,指纹检索效率亟待提高,指纹分类技术显得尤为重要。目前常用的指纹分类算法大致可分为四类:基于规则的[1,2]、基于结构的[3]、基于统计的[4]、基于神经网络的[5,6]。这些分类算法大都建立在Henry的纹型分类模式[7]或其变种基础上,但因各纹型模式类间差距较小而类内差距较大,加上指纹图像还可能存在噪声和残缺,故指纹分类一直是一个难题。
当今主流的分类方法多是依据奇异点的位置、类型、数量和奇异点与其周围脊线的关系实现分类,因此,准确、全面、快速地提取奇异点具有重要意义。国内外常见的奇异点提取算法主要有基于Poincare index(简记为PI)的算法及其改进算法[8,9]、基于复数滤波的算法[10]、基于方向场模型的算法[11,12]、基于形态分析的算法[13]等,其中主流的是PI算法和基于复数滤波的算法,两者各有优势和不足:PI算法提取的奇异点较为齐全,但易受噪声干扰而产生伪奇异点,且无法稳定地判定奇异点类型;基于复数滤波的算法虽能准确定位奇异点位置及类型,但提取效果受限于所设置的门限值,且易受噪声干扰。尽管这两种方法单独使用时效果不佳,但具备一定的互补性。
本文提出了一种融合PI算法与复数滤波算法的奇异点提取算法及以此为基础的一种改进的指纹纹型分类算法。基于FVC2002和NIST-4指纹算法测试数据库所做的实验表明,本文提出的指纹图像奇异点提取与纹型分类方法具有较高的准确性和鲁棒性。
1 改进的基于方向场信息的奇异点提取算法
1.1 指纹图像块方向场估计
将经过滤波增强后的指纹图像分为16×16的方块,用经典的公式法[14]计算其块方向场:
(1)
(2)
(3)
(4)
1.2 奇异区定位算法
为减少奇异点提取算法的运算量并降低图像噪声干扰,应先初步定位奇异点所在的区域。为此,定义图像子块的曲率为:
(5)
式中的φ(m+i,n+j)为某图像子块周围八邻域子块的方向,图1(a)所示指纹图像的块曲率场如图1(b)所示。根据奇异点所在的图像子块及其邻域的图像子块曲率较大的特点,当某图像子块同时满足以下两个条件时,可判定其为奇异区:
(1) 其周围的八邻域子块中的任意四块满足下式:

(6)
(2) 满足C(m,n)>Cmean+Csd,Cmean和Csd分别为该图像子块及其周围八邻域子块的曲率均值和曲率均方差。

(a) 指纹图像 (b) 指纹图像曲率场
(c) 利用曲率场找到的奇异区
图1 指纹图像的曲率场与奇异区效果图
1.3 奇异点定位算法
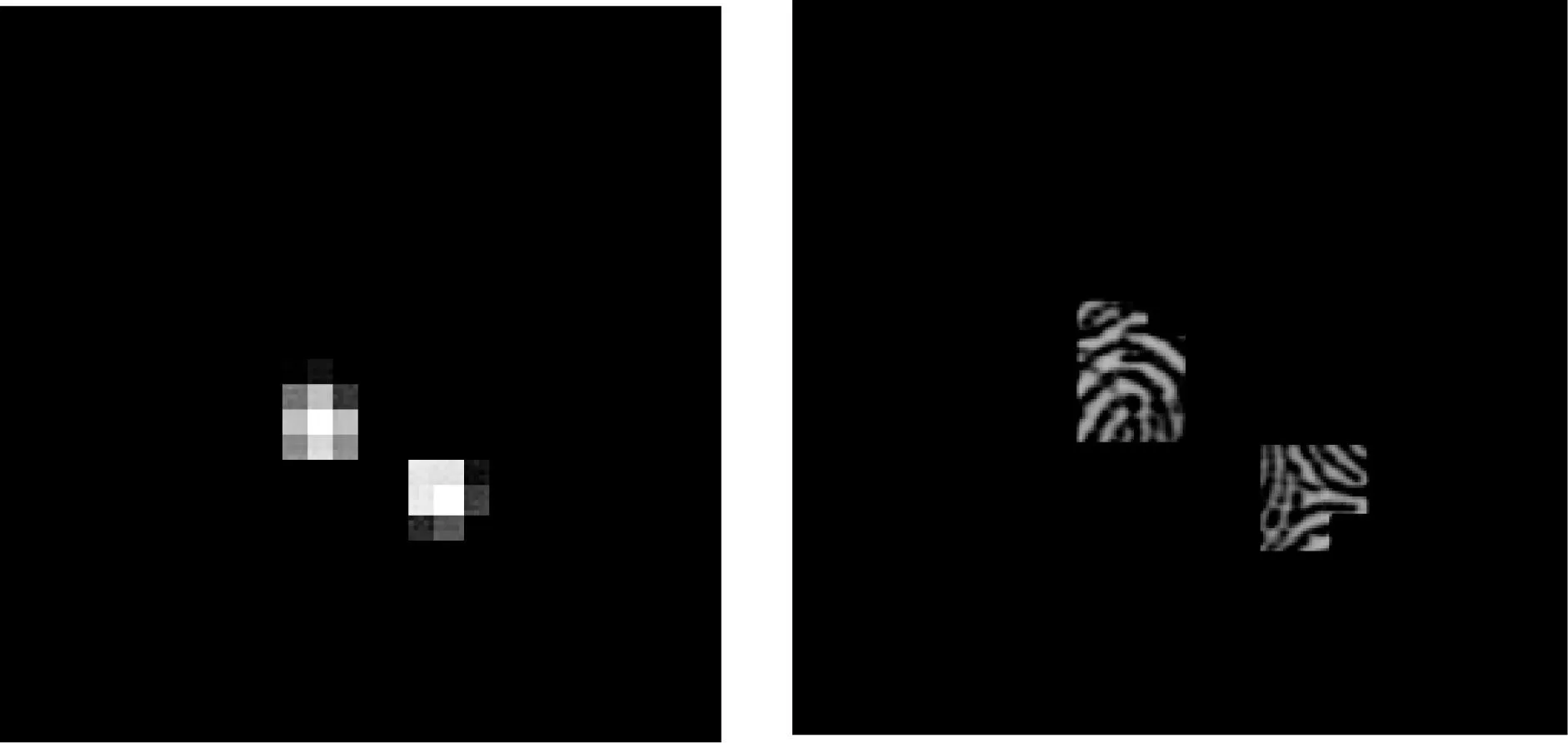
如图2所示,奇异点区域的方向场有如下三个特征:
(1) 环绕以奇异点为中心的闭曲线,以顺时针遍历一周,闭曲线上点的方向角度值由正变负和由负变正各一次。
(2) 与指纹图像上其他点相比,奇异点周围的纹线方向变化十分明显,围绕奇异点的闭曲线上的大多数相邻点的方向角度差的绝对值都大于π/2ψ(ψ为闭曲线上像素点的个数)。
(3) 在围绕奇异点的闭曲线上所有的方向角度差中,有某个方向角度差dδ(k)的绝对值远大于其他的方向角度差绝对值,如图2(a)、(b)圈处所示,称此现象为方向角度差突变。
(a) 中心点 (b) 三角点图2 奇异点周围封闭曲线上方向变化示意图
利用上述三个特征可对指纹图像奇异区内的点进行筛选,得到候选的奇异点集;然后通过计算候选奇异点的Poincare index值进行奇异点及其类型判定,判定过程如下:
(1) 计算指纹图像奇异区内的点方向场φ(x,y)。将式(1)中图像子块的中心点坐标(u,v)改为像素点坐标(x,y)后,利用式(1)-式(4)可得指纹图像奇异区内的点方向场φ(x,y)。
(2) 统计奇异区内像素点(x,y)周围封闭曲线上ψ个点的方向角度值由正变负和由负变正的次数,若两者各有一次,则进入步骤(3),否则认定像素点(x,y)为普通点。
(3) 计算顺时针围绕像素点(x,y)的封闭曲线上相邻两点的方向角度差,若有T个方向角度差的绝对值大于π/2ψ,且T>T1(T1=ψ/2),则进入步骤(4),否则认定其为普通点。
(4) 搜索围绕点(x,y)的封闭曲线上方向角度差绝对值的最大值,若封闭曲线上仅有该方向角度差的绝对值大于阈值π/2,则认为该点为奇异点。
(5) 计算奇异点的PI值,视其为1/2或-1/2而分别判定相应奇异点为中心点或三角点。
2 改进的基于复数滤波的奇异点提取算法
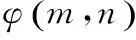
利用中心点(Core点)具备较强的圆对称性、三角点(Delta点)具备较强的三角对称性的特点,分别使用圆对称和三角对称滤波器对指纹奇异区的平方复数点方向场进行滤波,可获得图3(b)、(d)所示的滤波响应场,所获滤波响应场具备以下特点:
(1) 中心点对于圆对称滤波器的响应明显强于三角点,而三角点对于三角对称滤波器的响应明显强于中心点,噪声点在这两种滤波器作用下均有较强的响应;
(2) 奇异点附近区域内的点呈现与该奇异点一致的圆对称性或三角对称性,而噪声点附近的点一般不具备与噪声点一致的圆对称性或三角对称性。
根据滤波响应场的上述特点可判定奇异点及其类型[10],但判定结果易受噪声干扰。因此,本文提出在对指纹图像奇异区进行复数滤波的基础上,分别对圆对称和三角对称滤波响应场进行增强处理,以加大奇异点附近的复数滤波响应并抑制噪声点的滤波响应,改进后的基于复数滤波的奇异点提取算法如下:
(1) 计算指纹图像奇异区内的梯度矢量场[Gx(x,y),Gy(x,y)],由此获得奇异区内的平方复数点方向场p(x,y):
(7)
对p(x,y)进行小尺度的高斯低通滤波以平滑图像的平方复数点方向场的噪声并保留奇异区内的细节纹理特性[15]。
hcore(s,t)=(s+it)g(s,t)
(8)
hdelta(s,t)=(s-it)g(s,t)
(9)
式(8)、式(9)中的g(s,t)为高斯窗函数。



(11)
式(10)、(11)中的rcore(x,y)和rdelta(x,y)分别表示点(x,y)的圆对称和三角对称滤波响应幅度,αcore(x,y)和αdelta(x,y)分别表示点(x,y)的圆对称和三角对称滤波响应幅相角。
(4) 分别对rcore和rdelta进行增强处理:
Rcore(x,y)=rcore(x,y)×[1-rdelta(x,y)]
(12)
Rdelta(x,y)=rdelta(x,y)×[1-rcore(x,y)]
(13)
(14)
(15)
对比图3(b)和(c)、(d)和(e)可以发现,经过本文增强和均值滤波处理的滤波响应幅度场受噪声干扰的影响明显变小。



(a) 指纹图像
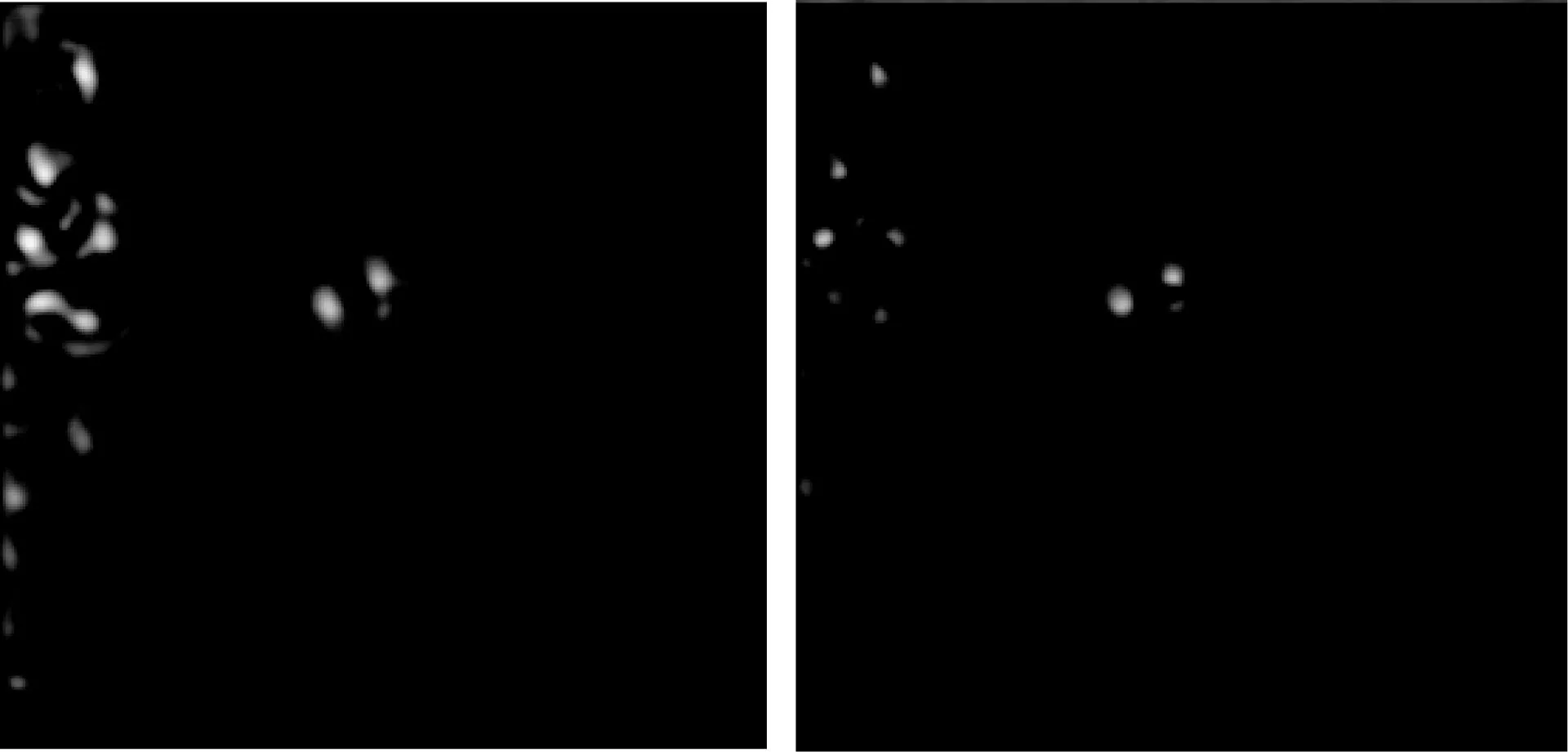
(b) 圆对称滤波幅度场 (c) 增强的圆对称滤波幅度场
(d) 三角对称滤波幅度场 (e) 增强的三角对称滤波幅度场图3 指纹图像的复数滤波幅度场效果图
3 基于信息融合的奇异点提取算法
基于奇异点方向场信息和复数滤波信息融合的奇异点提取算法步骤如下:
(1) 对指纹图像进行分割和图像增强处理以连接断纹并滤除图像噪声;
(2) 计算经过预处理后的指纹图像的块方向场,并定位指纹图像的奇异区;
(3) 基于奇异点方向场信息,在奇异区中提取候选奇异点。采用5×5和7×7两条不同的封闭曲线分别在奇异区中寻找奇异点,若某点在两条封闭曲线上均满足奇异点判定条件,则将其作为候选奇异点,由此获得候选奇异点集A;
(4) 根据点集A中各候选奇异点的PI值判定其为中心点或三角点,分别组成中心点点集Acore和三角点点集Adelta;
(6) 通过信息融合提取奇异点:
(a) 若点集A和B中候选奇异点数同为0、2或4个,且两个点集中对应点的位置及类型信息一致(对应点的欧氏距离在10个像素以内),则认为点集A和B中的候选奇异点均为真实奇异点,点集Acore为真实中心点集,点集Adelta为真实三角点集,结束奇异点提取过程;
(b) 若点集A和B中对应位置的候选奇异点仅类型不同,其余情况与(a)中的描述一致,考虑到改进的基于复数滤波的算法对奇异点的分类更为稳定和准确,则将点集Bcore作为真实中心点集,点集Bdelta作为真实三角点集,结束奇异点提取过程;
(c) 若(a)和(b)均不满足,则首先确定点集A和B中位置和类型信息一致的对应点,将其作为真实奇异点,并根据其类型分别放入中心点点集Ccore或三角点点集Cdelta中,然后删除点集A和B中已提取的对应点,对两个点集中其余的点取并集得到点集C,执行步骤(7);
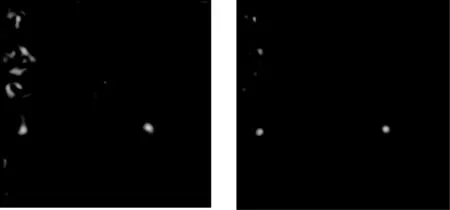
遍历C中所有的点,计算以每个点为中心、半径为6r(r为平均纹线间距)的圆形区域内的coherence值,并将该圆形区域分为16个方向。为统计每个方向上coherence值的变化情况,将该圆形区域用半径分别为2r和4r的两个内圆划分为图4(c)中所示的一个中心圆形区域和32个扇形区域;计算16个方向中每个方向对应的三个区域(圆形区域和两扇形区域)各自的coherence平均值,若从内到外三个区域的coherence值逐渐增大,则判定该方向有效,统计每个点周围有效的方向数num,若num≥12,则保留该点,否则认为该点为伪奇异点,将其从点集C中删除;
(8) 使用改进的基于复数滤波的算法对点集C中保留的候选奇异点进行分类,根据分类结果将其分别放入点集Ccore和Cdelta中;
(9) 合并真实中心点集Acore、Bcore、Ccore和真实三角点集Adelta、Bdelta、Cdelta。

(a)指纹图像候补奇异点集示意图 (b)指纹图像的Coherence场去伪效果
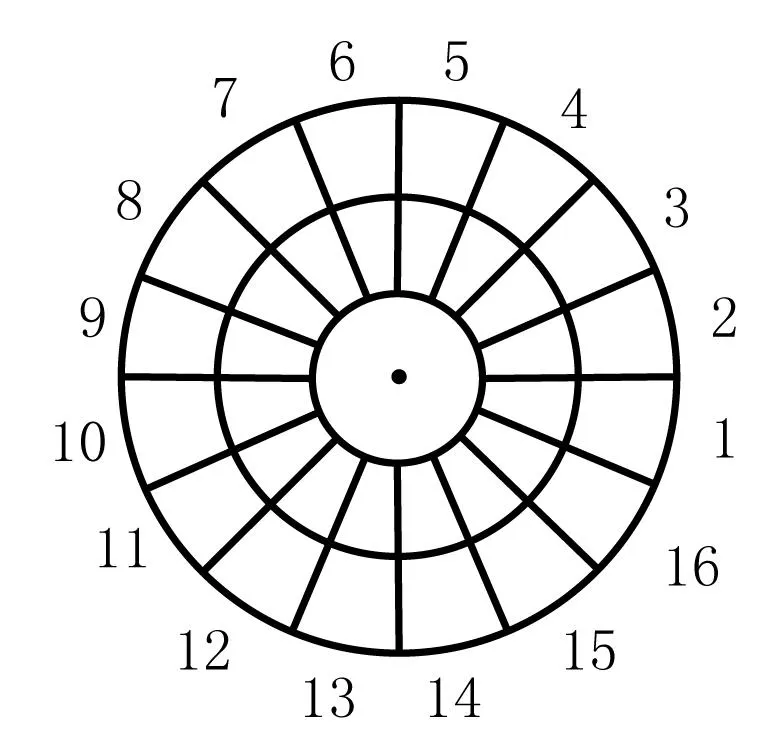
(c) 候补奇异点周围圆形区域
图4 基于Gaussian-Hermite矩的奇异点去伪示意图
4 基于中心点最优方向和脊线跟踪相结合的纹型分类算法
利用奇异点信息和其他辅助信息可以将指纹图像分为拱形、尖拱、左旋、右旋、漩涡、杂类六类,其中杂类为无法分为前五类的指纹图像集合;由于双旋和漩涡两种类型容易混淆,故将其统一归入漩涡类。
利用奇异点信息分类的算法大都使用中心点的方向与中心点和三角点连线方向的角度差来判断左旋、右旋和尖拱三种纹型,这种分类办法虽然简单直观,但如何准确地计算中心点的方向成为难点。中心点的方向应该与其所在的主脊线方向一致,而实验表明,直接使用中心点对应的点方向场值或者复数滤波所得的方向角度值往往不够准确。因此,本文对于有一个中心点和一个三角点的指纹图像,首先计算中心点的最优方向,然后根据最优方向与两奇异点连线方向的角度差进行分类;针对缺失三角点的指纹图像,利用脊线跟踪进行分类;其余指纹图像根据奇异点数目进行分类。具体分类算法如下:
(1) 若不存在奇异点,则将指纹图像分类为拱形。
(2) 若中心点和三角点各有两个,则将指纹图像分类为漩涡。

(16)

(6) 针对采集漩涡形指纹时易遗漏三角点的问题,为避免将其分为杂类,若指纹图像有两个中心点和一个三角点,则对其进行脊线跟踪,若跟踪到下凹形脊线,则将其分为漩涡类。
(7) 其他未分类的指纹统一归为杂类。
5 实验结果与分析
选用测试指纹识别系统性能的常用指纹数据库FVC2002和NIST- 4来验证本文的奇异点提取和纹型分类算法的准确性。实验在酷睿i5- 3210M(2.50 Ghz)处理器、内存为5.87 GB的PC机上运行,采用Matlab 7.8(R2009a)软件对指纹图像进行处理。
在FVC2002数据库的Db1指纹库和NIST- 4数据库中分别随机选取了500幅指纹图像,使用本文方法与基于PI的传统的奇异点提取算法和基于传统的复数滤波奇异点提取算法及目前性能最好的基于常微分方程线性化模型分析的奇异点提取算法[12]进行奇异点提取对比实验;因FVC2002数据库中的指纹图像漏采奇异点的现象严重,仅在NIST- 4数据库中随机选取1500幅指纹图像,使用本文方法与传统分类算法[1]和目前性能最好的基于奇异点信息的纹型分类算法[2]进行纹型分类对比实验。
(1) 奇异点提取结果
因FVC2002数据库和NIST- 4数据库均未提供奇异点信息,故采用人工标注法确定奇异点的数目和位置。若被提取的奇异点的位置与所标记的奇异点的欧氏距离大于15个像素,则认为奇异点提取错误,否则认为提取准确。

表1 不同算法在FVC2002.DB1上的结果对比
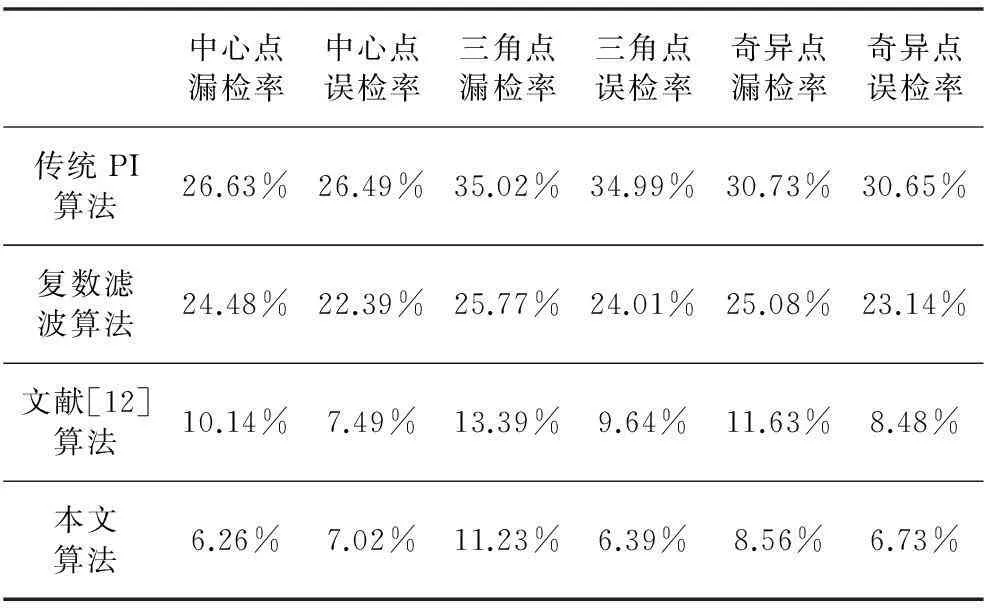
表2 不同算法在NIST4上的结果对比
从表1和表2中可以看出,本文的奇异点提取算法优于传统的PI方法和复数滤波算法,对FVC2002数据库,本文算法的奇异点漏检率和误检率略高于文献[12]的算法,但对具有较多低质量指纹的NIST4数据库,本文算法更具优势,说明本文的算法能更有效地提取较低质量指纹图像的奇异点,即对于低质量指纹图像,本文方法具有更高的准确性和更强的鲁棒性。
(2) 纹型分类结果
从NIST- 4数据库中选取的1500幅指纹图像中,有197幅因图像质量过差而被排除,剩余的1303幅用来测试分类算法,测试结果如表3所示。

表3 本文算法的指纹图像分类结果
表3的实验结果显示,指纹图像分类正确率为(231+277+235+282+190)/1303 = 93.09%。由表3可以看出,由于奇异点的缺失、漏检和误检现象,较多指纹图像被分为杂类。按照文献[1]和文献[2]的做法,舍去分为杂类的指纹图像,便可得到本文算法与使用中心点对应的点方向场值作为中心点主方向的传统分类算法[1]和文献[2]的算法分类结果对比如表4所示。
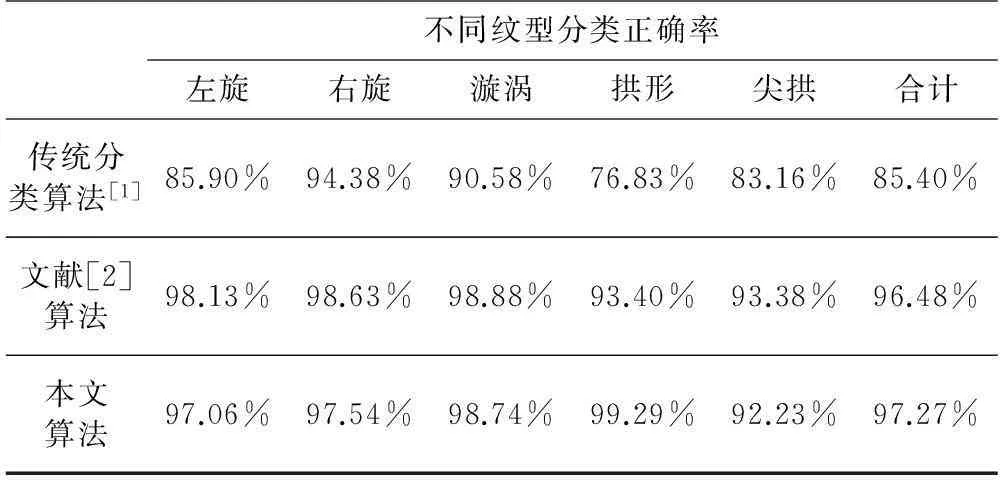
表4 不同算法的分类结果对比
表4的实验结果显示,本文算法的分类结果全面优于传统分类方法[1],与文献[2]相比,本文方法对左旋、右旋和尖拱三种纹型的分类效果略差,但整体分类效果略优于文献[2]的方法,其原因在于某些特殊的左、右旋和尖拱型指纹图像的主中心点方向与中心点和三角点连线方向的角度差较为接近,导致在分类时左、右旋型指纹图像与尖拱型指纹图像容易互相混淆,从而降低了这三类纹型指纹图像的分类效果。
(3)算法时间性能
在NIST- 4数据库中对不同算法处理一副指纹图像的平均运行时间对比结果如表5所示。
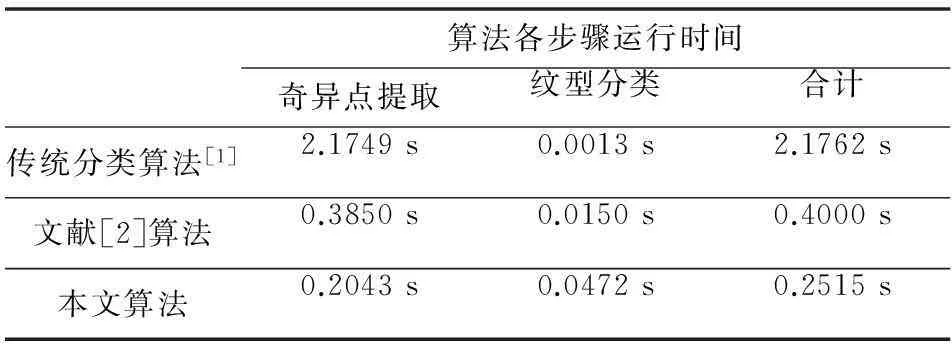
表 5 不同算法平均运行时间结果对比
从表5可见,本文方法对奇异点的提取速度较快;但在纹型分类方面,由于本文方法首先计算主中心点方向,因此速度较慢,但奇异点提取与纹型分类算法的合计速度仍明显优于另外两种纹型分类算法。
6 结 语
提出了一种基于奇异点区域方向场信息和奇异区复数滤波场信息的改进的奇异点提取算法和一种基于信息融合的指纹纹型分类算法,能全面准确地提取指纹图像的奇异点,并准确稳定地对指纹图像进行纹型分类。奇异点提取算法利用指纹图像的块曲率场确定奇异点所在的区域;然后,将基于奇异点区域方向场信息的奇异点提取算法和基于奇异区复数滤波场的奇异点提取算法相结合,以完整提取奇异点;最后,利用奇异点周围像素的Gaussian- Hermite矩分布属性剔除伪奇异点,以实现奇异点的准确提取。纹型分类算法除利用奇异点的数目和几何位置关系以及中心点的主方向将指纹分为拱形、尖拱、左旋、右旋、漩涡、杂类六种纹型外,对于缺少三角奇异点的指纹,使用脊线跟踪进行分类。
实验结果表明,与传统的基于PI的算法和复数滤波算法相比,本文的奇异点提取算法能较为全面准确、快速稳定地提取奇异点,特别是能更准确有效地提取较低质量指纹中的奇异点。此外,本文的纹型分类算法对于NIST4指纹库中各类指纹图像的分类正确率达到93.09%,具有较高的分类准确性、鲁棒性和快速性。
[1] Kalle K,Anil K J.Fingerprint Classification[J].Pattern Recognition,1996,29(3):389-404.
[2] Tariq A,Akram M U,Khan S A.An Automated System for Fingerprint Classification using Singular Points for Biometric Security[C]//2011 International Conference for Internet Technology and Secured Transactions (ICITST),Abu Dhabi:IEEE,2011:170-175
[3] Cao Kai,Pang Liaojun,Liang Jimin,et al.Fingerprint classification by a hierarchical classifier[J].Pattern Recognition,2013,46(12):3186-3197
[4] Jung H W,Lee J H.Live- scanned fingerprint classification with Markov models modified by GA[J].International Journal of Control,Automation,and Systems,2011,9(5):933-940
[5] Li Xiangrong,Wang Guohui,Lu Xiangjiang.Neural Network Based Automatic Fingerprints Classification Algorithm[C]//2010 International Conference of Information Science and Management Engineering (ISME),Xi An:IEEE,2010:94-96
[6] Turky A M,Ahmad A.The use of SOM for fingerprint classification[C]// 2010 International Conference on Information Retrieval & Knowledge Management(CAMP),Shah Alam,Selangor :IEEE,2010:287-290
[7] Henry E.classification and uses of fingerprints[M].London:Routledge,1900.
[8] Li Yue,Mandal M,Lu Cheng.Singular point detection based on orientation filed regularization and poincaré index in fingerprint images[C]//2013 IEEE International Conference on Acoustics,Speech and Signal Processing (ICASSP),Vancouver,BC:IEEE,2013:26-31
[9] Saquib Z,Salam N,Nair R,et al.An enhanced method for singular points detection in fingerprint images[C]//2010 International Conference on Computer and Communication Technology (ICCCT),Allahabad:IEEE 2010:17-19.
[10] Nilsson K,Bigun J.Localization of corresponding points in fingerprints by complex filtering[J].Pattern Recognition,2003,24(13):2135-2144.
[11] Su Fei,Sun Peng,Wang Botao,et al.Fingerprint singular points extraction based on the properties of orientation model[J].The Journal of China Universities of Posts and Telecommunications,2011,18(1):98-104.
[12] 王晓端,刘书炘,刘满华.基于模型分析的指纹奇异点检测[J].上海交通大学学报,2013,47(8):1222-1226,1233
[13] Chen Jianliung,Huang Conghui,Du Yichun,et al.Combining fractional-order edge detection and chaos synchronisation classifier for fingerprint identification[J].IET Image Processing,2014,8(6):354-362.
[14] Hong L,Wan Yifei,Jain A.Fingerprint image enhancement:algorithm and performance evaluation[J].Pattern Analysis and Machine Intelligence,1998,20(80):777-789.
[15] Chikkerur S,Ratha N.Impact of singular point detection on fingerprint matching performance[C]//Proceedings of the 4th IEEE workshop on Automatic Identification Advanced Technologies:IEEE:2005:207-212.
[16] Wang Lin,Dai Mo.An effective method for extracting singular points in fingerprint images[J].International Journal of Electronics and Communications,2006,60(9):671-676.
A FINGERPRINT SINGULAR POINTS EXTRACTION AND CLASSIFICATION ALGORITHM BASED ON INFORMATION FUSION
Zhang Ye1Peng Xiaoqi1,2Zhong Yunfei3Tang Ying1
1(SchoolofPhysicsandElectronic,CentralSouthUniversity,ChangshaHunan410083,Hunam,China)2(DepartmentofInformationScienceandEngineering,HunanFirstNormalCollege,Changsha410205,Hunam,China)3(SchoolofInformationScienceandEngineering,CentralSouthUniversity,ChangshaHunan410083,Hunam,China)
Accurately and reliably classifying the fingerprint images into different classes is very important to promote the retrieval and matching efficiency in large fingerprint databases.In this paper we propose an information fusion-based fingerprint singular points extraction and classification algorithm.First,we present two improved singular points extraction algorithms,which are based on the orientation field information of singular points region and on the complex filtering field information of singular regions respectively,,and fuse these two algorithms to extract the singular points in whole; Secondly,we employ the distribution attribute of Gaussian-Hermite moments in neighbourhood of the extracted singular points to cull the false singular points; Finally,we classify the fingerprints into six familiar classes by making use of the number and the location relation of singular points as well as the main direction of core singular points,.For the fingerprints lacking the delta singular points,the ridge tracing algorithm is adopted.Experiment shows that the proposed fingerprint singular points extraction and classification algorithm is novel and effective with higher accuracy and robustness.
Fingerprint Singular point Information fusion Main direction Classification
2014-11-06。湖南省自然科学基金重点项目(10JJ2048);湖南省科技厅项目(2011GK3079)。张晔,硕士生,主研领域:模式识别,数字图像处理。彭小奇,教授。钟云飞,博士生。唐英,教授。
TP31
A
10.3969/j.issn.1000-386x.2016.04.058
