基于多层马尔科夫随机场融合的图像分割
2016-05-09金永男尚岩峰
金永男 曹 国 尚岩峰
基于多层马尔科夫随机场融合的图像分割
金永男1曹 国1尚岩峰2
1(南京理工大学模式识别与智能系 江苏 南京 210094)
2(公安部第三研究所 上海 201204)
由于传统图像分割方法对噪声的敏感性和检测结果的不连续性等问题导致图像分割精度较低,提出一种基于多层马尔科夫随机场模型融合的图像分割方法。首先分别通过模糊C均值聚类(FCM)方法和马尔科夫随机场(MRF)方法得到两个分割效果较差的图像,随后运用多层马尔科夫随机场模型的融合特性将两个传统方法得到的分割结果进行融合。该方法运用多层马尔科夫随机场融合方法引入邻域内像素间相关性和各层间的联系,并且在实验中得出与两个传统方法相比较更细致和精确的结果。实验结果表明,多层马尔科夫随机场模型的融合方法可以将两个传统分割方法的结果较好地融合,并且得到更加精确的结果。
图像分割 马尔科夫随机场 模糊C均值(FCM) 最大后验估计(MAP)
0 引 言
图像分割技术是数字图像处理领域一个不可或缺的研究方向,是由图像处理到分析过程中至关重要的一步。它广泛应用于医学影像分析、军事研究领域、遥感气象服务、交通图像分析、土地资源调查等多种图像处理与分析领域。所谓图像分割就是从图像中把多个特定的、具有不同特性的模块按照需求、类别标记出来的技术和过程。图像分割的最终目的是转换并简化图像的表示形式[1],使其更容易被人类肉眼所识别和判断,更容易被计算机理解、分析和处理。
图像分割在研究与实现过程面临的最大困难之一就是信息的不确定性。没有一种分割方法能够用于所有图像,通常要根据不同分割对象要采用不同的方法。当前常用分割方法很多,这些方法大致可以分为基于阈值的分割、基于边缘的分割、基于区域的分割和一些基于特定理论和公式的分割。基于阈值的分割优点在于算法简单易实现,不过由于该方法没有考虑图像的空间信息和相邻像素相关性而导致部分图像不能得到连续的分割结果并且分割结果会产生大量噪点;基于边缘的分割不但对图像噪声十分敏感,而且对于图像中的纹理区域区分效果较差,而导致纹理区域分割效果不理想;基于区域的图像分割不但能够克服大量噪声,而且充分运用了图像的空间特征和信息,所以对图像连续区域的分割效果比较好。随着当今图像处理技术的不断革新,大量其他科学领域的特定理论、公式运用到了图像分割方法中。由于马尔科夫随机场理论在图像分割领域的优秀表现吸引了大量研究人员的关注。这种方法不仅易于实现,而且结合贝叶斯理论,通过统计学理论中的最优化准则,将图像分割问题转换为求解最优化问题。这些理论和求解方法的出现,进一步促进了图像分割理论与应用的发展,其算法效率和精度都远远超过了传统分割方法所得到的结果。
模糊C均值(FCM)[2,3]分割方法对初始参数极为敏感,极易受噪声和灰度不均匀影响。单层马尔科夫随机场的方法会根据一些初始参数的设置产生不同程度错分割。针对以上两种经典的分割方法,本文充分运用多层马尔科夫随机场的融合性质,将两种不同分割方法的分割结果进行了融合。
1 基于三层马尔科夫随机场融合的分割方法
基于多层马尔科夫随机场分割方法的优势在于可以把多个分割方法的图像分割结果融合到一起。通过多层马尔科夫随机场的融合,这些多个分割结果可以很好地相互弥补各自的缺点,从而获取更加精确的结果。
基于三层马尔科夫随机场中的“三层”中的第一层指的是由第一个种分割方法分割出的结果,在本文中是通过FCM分割方法得到的分割结果。第二层指的是由第二个分割方法分割出的结果,在本文中是通过基于单层马尔科夫随机场模型分割得到的分割结果。而第三层指的是由第一层和第二层的分割结果融合而成的分割结果,也就是我们最终得到的分割结果。
1.1 基于FCM图像分割方法
模糊C均值聚类(FCM)方法[4,5]就是模糊ISODATA。在所有模糊聚类方法中,FCM算法最成功并且在图像处理与分析领域的应用最广泛。
模糊C均值算法作为基于划分的聚类算法,它的基本思想是把相关性大的两点划分为同一类,并且给予同一种类号,把相关性小的两点划分为不同的类。
算法的大致过程如下:
步骤1 使用0与1之间的任意数来初始化隶属矩阵U,令其满足一个数据集的隶属度的总和等于1的前提条件;
步骤2 计算聚类中心;
步骤3 计算FCM价值函数,如果该价值函数小于预先设定好的阀值,或者它与上一次价值函数比较,其改变量小于指定阈值,则退出算法;
步骤4 计算新的U矩阵,返回步骤2。
从上述执行步骤我们看出FCM方法只不过是一个迭代过程。上述算法也可在执行第一步之前预先设置聚类中心。因为无法保证上述迭代过程最终收敛得到一个最优解,最终结果的好与坏直接依赖于是否设置了合适的聚类中心。因此想要提高算法效率要么用另外的快速算法确定聚类中心,要么增加试验次数来确定能够得到合适的聚类中心。
1.2 基于MRF图像分割方法
由Hammersley-Clifford定理[6],MRF能够等价描述为Gibbs分布,则有:
P(x)=Z-1exp(-U(x))
(1)

(2)
x被认为是马尔科夫随机场的一个具体实现,所以它的先验概率可以通过式(1)计算,又由似然估计准则,式(1)可以转换为:
(3)
由Potts模型有:Vc(xi)=δ(xi,yi),j∈Ni则:
(4)
在给定类别标号xi=L时,一般认为像素值yi服从参数为θi={μi,σi}的高斯分布:
(5)
基于最大后验概率[7,8]准则的分割,就是计算最优标签集X,使X的后验概率分布最大。考虑到算法时间和效率问题,本文使用了条件迭代方法求解最大后验概率标签集。
(6)
1.3 基于三层马尔科夫随机场模型融合
本文用三维数组表示了三层图g,并在该图上建立了三层马尔科夫随机场模型[9]。通过前述的两种方法我们会得到两个分割结果,再用三层马尔科夫随机场的融合特性将两个分割结果融合。为此我们分别将Sd、S*、Sr安排到图像g上,并且在每个层为每个节点安排一个独立的节点。例如sd是在Sd这一层中对应像素s的节点。同样地,s*∈S*,sr∈Sr。本文为图g中所有的点安排了一个专属标签记为ω(·) ,来自标签集φ={1,2,…,n},该标签代表该点所属的类别。其中n表示分割图像的分类数。图像g的全部标签表示如下:
(7)
为了融合图像g的两层,引入层间基团[10]和层内基团,由此得基团集为C=C1+C2+C3。
O={Sd∪Sr}
(8)
其中,Sd表示使用FCM分割方法的得到的结果,Sr表示使用基于MRF分割方法得到的结果。

(9)
其中,φ是所有标签集的可能集。
根据Hammersley-Clifford理论最大后验概率服从吉布斯分布:
(10)
其中,Z 是归一化常数,Vc是能量函数,C代表对于某个像素的邻域系统δ所包含基团的所有集合。我们在S中使用了一阶邻域系统,即每个点拥有四个邻域。
为了提高检测结果的平滑度,引入的层间的双点势函数如下:

(11)
其中,δi>0,本文中取值为0.75。
为了提高融合效果本文还引入了层内三点基团C3={sd,sr,s*}的势函数如下:
(12)
因此最优的最大后验概率(MAP)[11]可以通过如下公式计算:
(13)
上述能量最小值通过模拟退火方法执行,得到的最终结果作为S*层标签,即最终的融合结果。具体算法流程如图1所示。
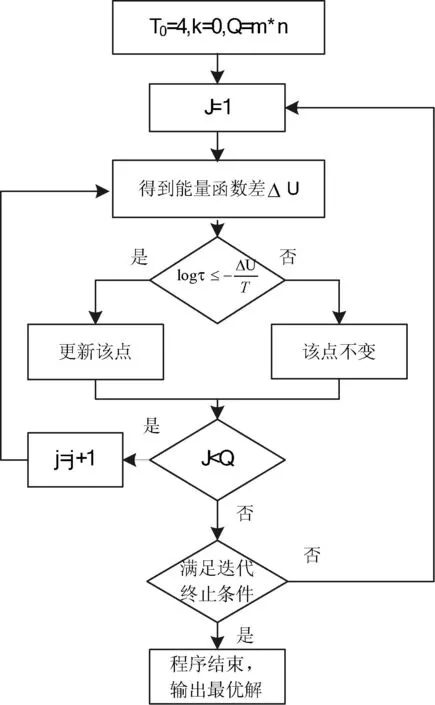
图1 算法流程图
图1中T0是模拟退火算法初始温度,k表示迭代次数,Q是图像中的像素个数。ΔU的计算方法如下:

(14)
更新的方法是使用满足条件的类别号更新。当两次相邻的迭代改变量的差小于某个设定阈值的时候终止迭代。
2 实验结果与分析
为了证实本文所提出方法的有效性,从多组实验中挑出了两组实验,并对实验所得数据进行了详细的分析。具体实验环境参数如下:
1) 测试机为Intel(R)Core(TM)i3-2450CPU主频2.50GHz,安装内存2.00GB;
2) 测试用计算机所装系统为Windows7 操作系统;
3) 本文中所提出的算法在MATLAB编程软件下运行。
第一组实验中我们采用了来自资源卫星中心的如图2(a)所示的480×300遥感图像。图像中大量的噪声会影响分割结果和分割效果,所以实验图像选用了噪声较少的清晰图像。该图像主要由雪地、土地和湖泊组成,本文将该图像分割为土地、雪地和湖泊三类。
比较实验结果图2(d)和(e)得知本文提出的基于三层马尔科夫随机场的融合分割方法可以有效地分割待分割图像。比较图2(b)和(d)得知本文所述方法消除了基于FCM方法运行结果的大量噪声。比较图2(c)和(d)得知MRF融合方法可以有效改善分割结果的错分割和噪声问题。
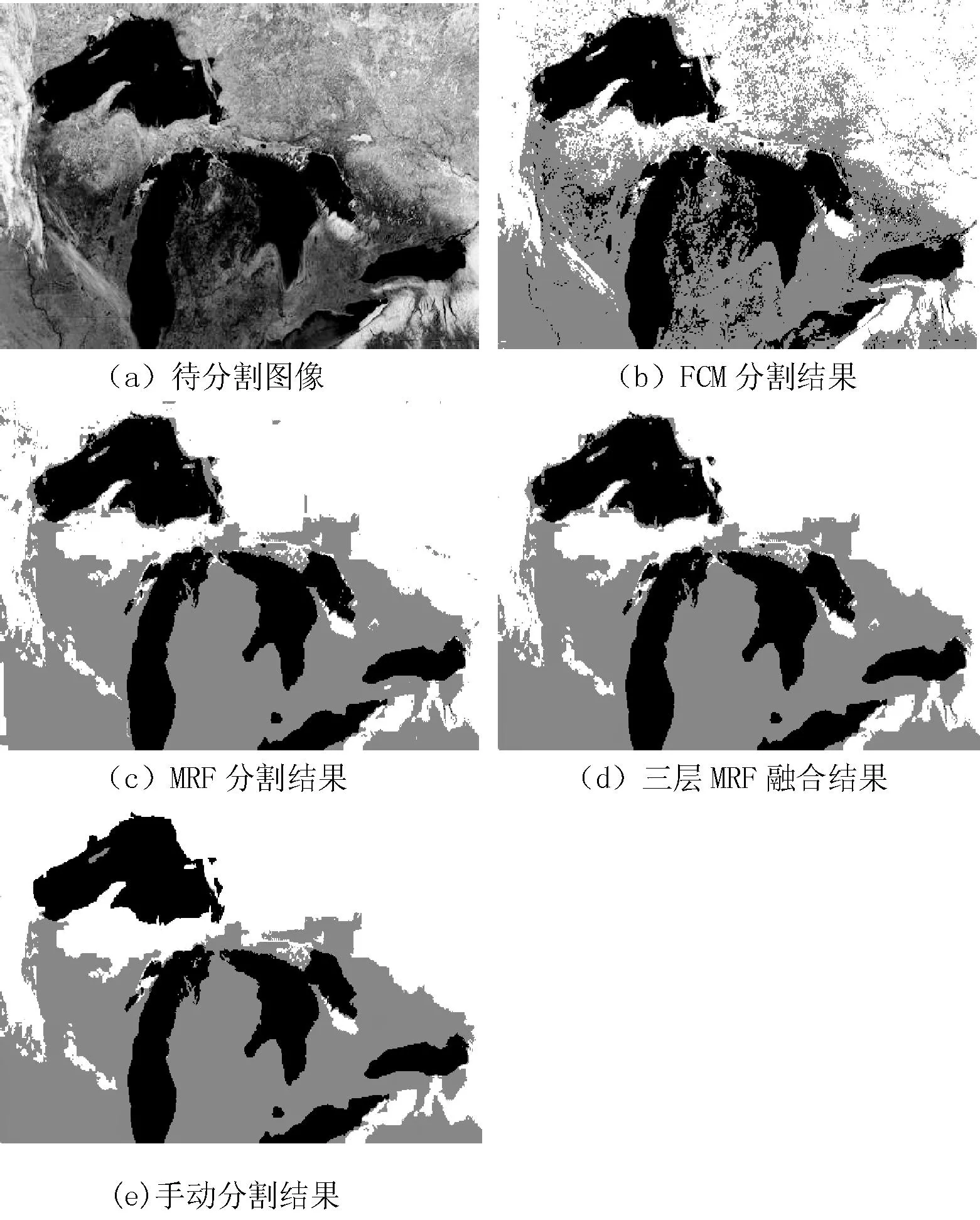
图2 原始图像,融合前后三种方法的分割结果和手动分割结果
表1是对三种方法的客观评估表。其中错分割像素是通过比较该方法所得到的分割结果和手动分割结果,得到两幅图像的不同像素点的个数,错分割率是错分割像素数和图像总像素数的比。从表1得知基于三层马尔科夫随机场融合的分割方法与基于FCM分割和基于MRF的分割相比较能更好地完成实验图像的分割,与融合前的传统方法得到的结果相比较,在精度上有较大的提升。

表1 通过实验一对三种方法的客观评估
实验二采用了如图3(a)所示的300×300的彩色遥感图像。该图像主要由农田、土地和少量建筑组成,本文将图像分割为三类。
比较实验结果图3(d)和(e)进一步证明本文提出的基于三层马尔科夫随机场的融合分割方法可以有效地分割待分割图像。比较图3(b)和(d)可以看出马尔科夫融合的分割方法消除了基于FCM分割结果的大部分噪声和部分错分割部分。比较图3(c)和(d)得知融合的方法在保证精度的前提下能够有效地消除大部分噪声,并且修复部分错分割区域。三层马尔科夫融合结果与融合之前的两个传统分割方法相比有明显的改善和提高。
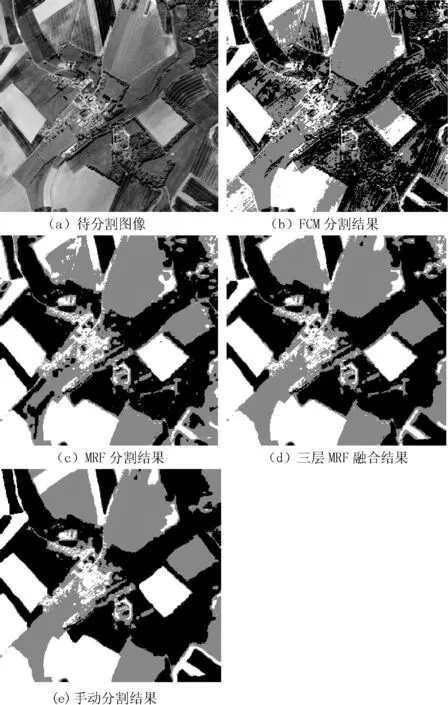
图3 原始图像,融合前后三种方法的分割结果和手动分割结果
表2为实验二的客观评估表,其计算方法与表1的计算方法相同。从表2得知基于三层马尔科夫随机场融合的方法与另外两种方法相比较能更好地完成实验图像的分割,分割效果有较大的改善。

表2 通过实验二对三种方法的客观评估
通过以上两组实验可知三层马尔科夫随机场融合的分割方法能够较好地分割待分割图像。与基于FCM的分割结果相比较基于多层马尔科夫随机场的融合方法不仅消除了大量的噪点,而且修改了部分错分割区域。与基于单层马尔科夫随机场模型的分割方法相比较在消除部分噪声之外也对部分错分割区域做出了修改。从以上两组实验结果和分析来看基于马尔科夫随机场的融合分割方法在不影响分割精度的前提下能将两种分割方法较好地融合,使分割结果更加精确。
3 结 语
本文运用多层马尔科夫随机场模型提出了融合多个方法的分割结果的新方法。通过实验证明该方法明显优于融合前的两个分割方法。该方法在保证精度的情况下改善了噪声和错分割情况。随着图像处理技术的不断发展,所要处理的图像也越来越复杂,大多数比较复杂的图像都不能通过一种分割方法达到较好的分割效果。在这种情况下如果采用本文提出的方法,先通过多种分割方法得到初步分割结果之后,再将其融合,得到更为精确、满意的分割结果。当然,该方法在分割边界处存在的部分错分割结果,怎样尽可能地减少分割边界处的错分割将是接下来研究的主要工作。
[1] Sonka M,Hlavac V,Boyle R.Image processing,analysis,and machine vision[M].Cengage Learning,2014.
[2] Gong M,Liang Y,Shi J,et al.Fuzzy c-means clustering with local information and kernel metric for image segmentation[J].Image Processing,IEEE Transactions on,2013,22(2):573-584.
[3] Gong M,Liang Y,Shi J,et al.Fuzzy c-means clustering with local information and kernel metric for image segmentation[J].Image Processing,IEEE Transactions on,2013,22(2):573-584.
[4] Zheng C,Qin Q,Liu G,et al.Image segmentation based on multiresolution Markov random field with fuzzy constraint in wavelet domain[J].IET image processing,2012,6(3):213-221.
[5] Siang Tan K,Mat Isa N A.Color image segmentation using histogram thresholding-Fuzzy C-means hybrid approach[J].Pattern Recognition,2011,44(1):1-15.
[6] Wei S,Leung H.A Markov Random Field Approach for Sidescan Sonar Change Detection[J].Oceanic Engineering,IEEE Journal of,2012,37(4):659-669.
[7] Li X,Zhu S.A Survey of the Markov random field method for image segmentation[J].Journal of Image and Graphics,2007,12(5):789-798.
[8] Xu M,Chen H,Varshney P K.An image fusion approach based on Markov random field[J].Geoscience and Remote Sensing,IEEE Transactions on,2011,49(12):5116-5127.
[9] Benedek C,Szirányi T,Kato Z,et al.A multi-layer MRF model for object-motion detection in unregistered airborne image-pairs[C]//Image Processing,2007.ICIP,IEEE International Conference on,IEEE,2007,6:141-144.
[10] He F,Tian Z,Liu X,et al.A fast edge tracking algorithm for image segmentation using a simple Markov random field model[C]//Computer Science and Electronics Engineering (ICCSEE),2012 International Conference on,IEEE,2012,1:633-636.
[11] Gane A,Hazan T,Jaakkola T.Learning with Maximum A-Posteriori Perturbation Models[C]//Proceedings of the Seventeenth International Conference on Artificial Intelligence and Statistics,2014:247-256.
IMAGE SEGMENTATION BASED ON MULTILAYER MARKOV RANDOM FIELD FUSION
Jin Yongnan1Cao Guo1Shang Yanfeng2
1(DepartmentofPatternRecognitionandIntelligent,NanjingUniversityofScienceandTechnology,Nanjing210094,Jiangsu,China)2(TheThirdResearchInstituteofMinistryofPublicSecurity,Shanghai201204,China)
Because of the sensitivity to noise and the discontinuity of detection results the traditional image segmentation method has, which result in low precision of image segmentation, this paper proposes an image segmentation method, it is based on multilayer Markov random field models fusion. First, we obtain two images with poorer segmentation results based on fuzzy c-means algorithm (FCM) and Markov random field (MRF) method separately. Then we use the fusion characteristic of multilayer MRF model to fuse these segmentation results derived from two traditional methods. The approach proposed in this paper makes use of the multilayer MRF fusion method to introduce the correlation between the pixels within neighbourhood and the links of each layer, and derives from experiment the more detailed and precise results compared with two traditional methods. Experimental results indicates that the fusion method of multilayer Markov random field model can better fuse the results of traditional segmentation methods, and achieves a more precise result.
Image segmentation Markov random field FCM Maximum a posteriori estimation (MAP)
2014-12-02。国家自然科学基金项目(61003108,6137 1168);上海市自然科学基金项目(13ZR1410400);公安部应用创新计划项目(2013YYCXGASS097)。金永男,硕士,主研领域:马尔科夫随机场图像分析。曹国,副教授。尚岩峰,副研究员。
TP391
A
10.3969/j.issn.1000-386x.2016.04.040
