永磁复合电机的DTC风力发电系统研究初探
2016-04-22朱江
朱江

摘 要:本文基于一种利用磁齿轮原理的新型电机,进行直接转矩发电控制。该电机具有低速、大转矩的运行特点,适合低速直驱风力发电系统。直接转矩控制不同于矢量控制,具有鲁棒性强、转矩动态响应快、控制结构简单等优点。
关键词:风力发电;磁齿轮电机;直接转矩控制;磁链计算
风力发电目前已经得到了广泛的应用,越来越受到世界各国的重视,我国风能资源丰富,可开发利用的风能储量约10亿kW,我国在风力发电方面也投入了较多的人力和物力,已经建成了一些具有一定规模的风力发电场。随着风力发电产业的发展,相关技术支撑显得越来越重要了,发电系统作为风力发电的主要核心部分起着至关重要的作用,本文的研究对象是永磁复合电机的DTC风力发电系统,文章主要从三个方面作了介绍。
1 直接转矩控制
1.1 直接转矩控制原理
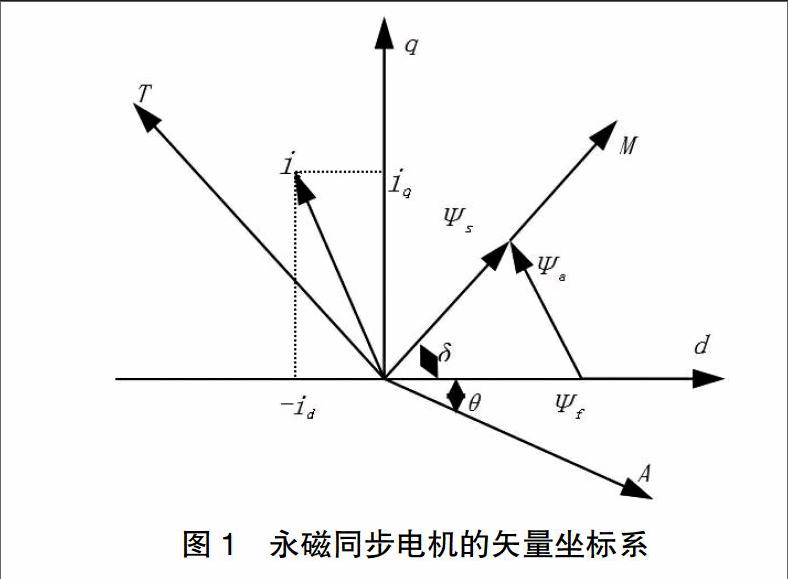
永磁同步电机的电磁转矩取决于定子交、直轴电流,还没有达到完全解耦。为此需要进行坐标变换解耦,需要坐标变换解耦,求出在以定子磁链Ψs方向为M轴的M、T坐标系的永磁同步电机的转矩方程。图1为永磁同步电机M、T坐标系及d、q坐标系的关系图及电动机各向量。图中,A为定子A相绕组轴线,Ψs为定子磁链,该磁链包括定子电流产生的磁链Ψa和永磁磁链Ψf 。
永磁同步电机输出转矩与定子磁链幅值、永磁磁链幅值及定转子磁链夹角δ的正弦成正比。在实际运行中,保持定子磁链幅值为额定值,以充分利用电机的铁心,永磁同步电机的转子磁链幅值也为恒值,要改变电机转矩的大小,可以通过改变定、转子磁链夹角的大小来实现,这就是直接转矩控制理论的指导思想。
当实际电磁转矩小于给定时,应选择使磁链沿原方向旋转的电压矢量,由于电机的机电时间常数远大于电磁时间常数,使得定子磁链瞬时转速变得比转子转速快,造成定转子磁链之间的夹角瞬时增加,转矩迅速增大,反之亦然。这样空间电压矢量选择,使得定子磁链不停地进进退退,瞬时改变功率角,使转矩得到快速动态控制。
1.2 磁齿轮电机直接转矩控制系统的实现
1.2.1 磁齿轮原理
磁齿轮电机是利用调磁环对内外磁场进行调制的,分析其磁场时可以分三步进行计算,第一步计算没有调磁环作用时,绕组建立的外部磁场,第二步计算调磁环对磁场的调制函数,第三步在第一步、第二步基础上计算实际的外部磁场。
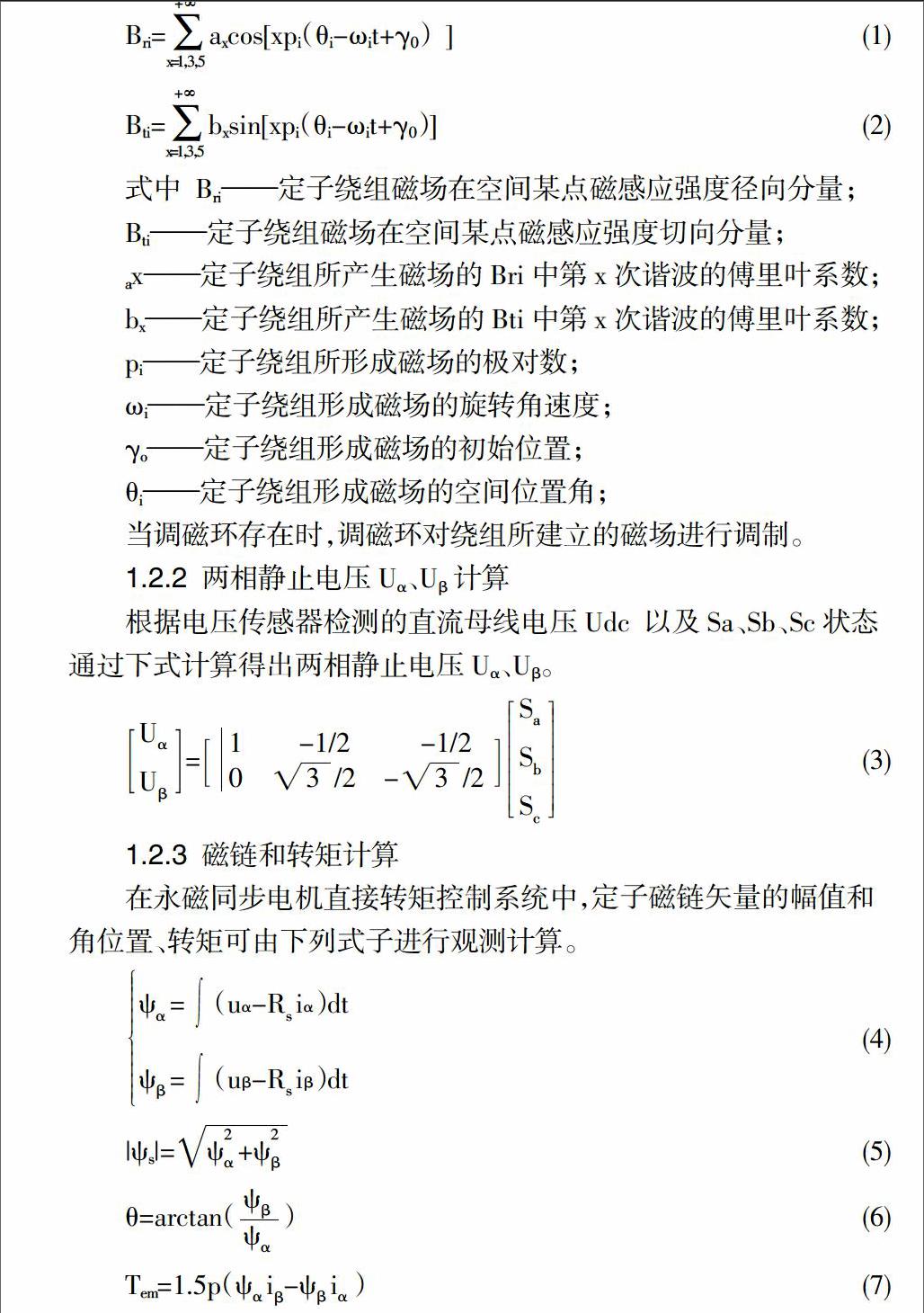
当不存在调磁环时,定子绕组在外层空间建立的磁场可表示为[5]:
Bri=axcos[xpi(θi-ωit+γ0) ](1)
Bti=bxsin[xpi(θi-ωit+γ0)] (2)
式中 Bri——定子绕组磁场在空间某点磁感应强度径向分量;
Bti——定子绕组磁场在空间某点磁感应强度切向分量;
ax——定子绕组所产生磁场的Bri中第x次谐波的傅里叶系数;
bx——定子绕组所产生磁场的Bti中第x次谐波的傅里叶系数;
pi——定子绕组所形成磁场的极对数;
ωi——定子绕组形成磁场的旋转角速度;
γo——定子绕组形成磁场的初始位置;
θi——定子绕组形成磁场的空间位置角;
当调磁环存在时,调磁环对绕组所建立的磁场进行调制。
1.2.2 两相静止电压Uα、Uβ计算
根据电压传感器检测的直流母线电压Udc 以及Sa、Sb、Sc状态通过下式计算得出两相静止电压Uα、Uβ。
U
U=1 -1/2 -1/2
0
/2
-/2
S
S
S (3)
1.2.3 磁链和转矩计算
在永磁同步电机直接转矩控制系统中,定子磁链矢量的幅值和角位置、转矩可由下列式子进行观测计算。
ψ
=(uα
-Riα)dt
ψ
=
(uβ
-Riβ)dt (4)
|ψs|= (5)
θ=arctan() (6)
Tem=1.5p(ψiβ-ψi) (7)
综上所述,风力发电低速直驱永磁同步电机的控制过程可描述为:风力带动风轮转动,通过风速检测装置检测风速,并将风速信号送入MPPT最大风力跟踪控制系统,永磁同步发电机安装位置检测系统将转速信号检测送入MPPT最大风力跟踪控制系统,利用公式计算出最佳叶尖速比λ,功率系数是叶尖速比λ的函数,将风力机系统的Cp和λ函数关系曲线存入系统,对于一个叶尖速比λ,查表得出对应的功率系数Cp,利用公式计算出风机的输入功率,则T=P/ω,从而得出发电机的输入转矩。
风力机只有运行到一个特定的速度下才会有最高的效率,最大风能跟踪的过程中,在浆距角一定的情况下,总有一个最佳的功率系数对应一个最佳的叶尖速比λopt ,此时风机效率最高,通过检测装置检测风速,在风速已知的情况下,可以利用最佳叶尖速比计算出最佳转速,将计算出的最佳转速送入直接转矩控制系统,利用PI转速调节器控制发电机转速始终跟随最佳转速,保持发电机转速的稳定。将检测装置检测出的直流母线电压以及发电机定子电流送入转矩和磁链观测器,利用公式计算出磁链幅值,电磁转矩实际值,以及位置信息,PI转速调节器计算出电磁转矩的给定值与计算出的实际电磁转矩进行滞环调节,通过控制电压矢量来实现控制定转子磁链夹角的变化,从而减小或增加电磁转矩来实现滞环控制。与此同时对磁链也进行滞环控制,其控制方式与对转矩控制相似,都是通过选择电压矢量来实现其滞环控制,保持磁链基本保持在一个恒定值上下小幅波动。
2 磁链观测器的实现
本文采用一种新的方法解决磁链计算当中存在的问题,电压法计算磁链依据式(4)进行建模,程序实现时一般采用低通滤波器(LPF)代替积分器进行计算,磁链观测器采用二级低通滤波器,加入积分进行动态修正。相对于一级低通滤波器而言,二级滤波器可以更准确的逼近真实的磁链计算相位,相位误差会较大幅度减小,同时也会使得计算出的磁链幅值与真实值更加接近。加入积分器主要为了消除对电机感应电动势采样过程带有的直流偏置,该积分模块通过转速计算出积分周期,前端通过滞环比较出积分周期个数k, k个电周期积分一次,根据傅里叶变换,该方法可以计算出二级滤波后信号带有的直流分量,然后在而二级滤波后信号中去除直流分量,得出不含有直流分量的、相位以及幅值较精确磁链计算结果。
η= (8)
η>1+γ or γ<1-γ k=k1 (9)
1-γ<η<1+γ k=k2(10)
式中γ为滞环宽度系数,ω为电角速度,ω*为给定转速计算出的角速度,η为二者的比例系数,反映出电机的旋转状况,也可以反映出电机是处于稳态运行,还是动态调整的过程中,当第一式成立时电机处于动态调整过程中,此时积分周期个数k应取较少的个数k1,当第二式成立时电机正处于稳态运行,此时积分周期个数k可以取较大的个数k2。从该种算法中看出,该算法更加适于转动惯量较大的电机,尤其是当电机稳态运行时,效果更加明显。
3 结论
本文针对一台磁齿轮电机,将直接转矩控制算法应用到其风力发电控制系统当中,对其进行了理论分析、仿真测试、实验测试。通过本文研究得出和验证以下结论:
①磁齿轮电机具有低速大转矩特性,因为其有磁场调制功能,所以在运行当中,相对于普通的永磁电机,有较高的转矩电流比。
②针对磁齿轮电机,MATLAB/Simulink 仿真和实验结果验证了所提直接转矩控制方法的有效性,利用DSP编写控制程序的实验过程中,体现出了DTC简洁明了、易于程序实现的特点。
③本文提出了一种新的磁链计算方法,该方法易于编程化实现,通过实际的控制,验证了该方法的可行性。
参考文献:
[1]刘英培.PMSM直接转矩控制方法及实验研究[D].天津:天津大学, 2010.
[2]韩学栋.电动汽车用新型永磁复合轮毂电机控制系统研究[D].南京:东南大学,2012.
[3]袁登科,陶生桂等编著.交流永磁电机变频调速系统[M].北京:机械工业出版社,2011.
[4]贾红云.磁通切换型高性能永磁电机研究[D].南京:东南大学,2011.
