自适应巡航控制系统中旁车道车辆并线控制的研究*
2016-04-11魏守洋马国成刘昭度
邹 渊,魏守洋,马国成,刘昭度,张 栋
(1.北京理工大学,北京电动车辆协同创新中心,北京 100081; 2.北京汽车销售有限公司,北京 100028)
2016052
自适应巡航控制系统中旁车道车辆并线控制的研究*
邹 渊1,魏守洋1,马国成1,刘昭度1,张 栋2
(1.北京理工大学,北京电动车辆协同创新中心,北京 100081; 2.北京汽车销售有限公司,北京 100028)
为解决自适应巡航控制对旁车道并线车辆的控制滞后问题并充分利用原有控制功能,设计了基于分层结构的旁车并线控制器。由模糊支持向量机对实际交通环境下的旁车并线数据进行机器学习而产生一个旁车并线意图识别器,用以检测旁车的并线行为。旁车并线控制器以主车与旁车的纵向相对车距和碰撞剩余时间为输入,利用模糊控制产生期望加速度以调节主车的期望运动状态,并由自适应巡航控制完成主车的动力学控制。仿真和实车试验结果表明,旁车并线控制器可与其它自适应巡航控制功能协调工作,在旁车并线工况下有效改善主车的行驶安全性。
驾驶员辅助系统;旁车并线控制;并线意图检测;自适应巡航控制
前言
先进驾驶员辅助系统(advanced driver assistance system, ADAS)可通过车载传感器获知环境车辆信息并辅助驾驶员对主车行驶进行控制,因此ADAS可有效减轻驾驶员操作负担并减小由于人为失误而引发交通事故的概率[1-2]。自适应巡航控制(adaptive cruise control, ACC)作为ADAS的典型应用之一,由车载雷达获取前方车辆的运动信息,并根据不同的前向交通情况完成对主车纵向自动行驶的控制[3]。由于传统ACC大多只能对主车道内的车辆进行识别与控制[4],而在旁车道车辆并线时只有当旁车完全进入主车道后才会引起ACC控制目标的改变,因此传统ACC的目标更新及控制相对滞后。特别是在旁车强行并线工况下,主车如不能及时做出反应则会给行驶安全带来严重威胁,由此在ACC中针对旁车并线工况展开相应控制就显得尤为必要。
为描述车辆的并线行为,文献[5]中建立了基于多车交互的并线模型,但其输出只能说明有并线需求的驾驶员在何种交通条件下会采取并线操作而不能检测车辆的并线意图和动作。文献[6]中利用旁车与主车的侧向相对车距和相对车速判断旁车的并线行为并据此进行相应控制,但其判断结果的主观性较大,不能客观反映旁车的并线意图。文献[7]中则利用仿真平台验证了由于传统ACC不能对正在并线的旁车做出及时响应、约有一半的驾驶员为确保安全会主动采取制动操作以中断ACC的自动控制。因此,本文中由实际交通环境中采集的旁车并线数据利用模糊支持向量机训练旁车并线意图识别器,并利用旁车与主车的行驶关系采用模糊控制进行旁车并线控制,以期使主车在并线车辆尚处于旁车道时即可提前适应其行驶情况,从而使ACC控制更加符合驾驶员的决策过程并提高主车的行驶安全性。
1 旁车并线控制器的结构
ACC由中央协调器根据环境车辆与主车的运动关系决定主车的控制模式,以使主车进入前车跟随行驶或定速巡航状态。当满足旁车并线控制条件时,主车启动旁车并线控制。为保证控制的鲁棒性并充分利用已有的ACC控制功能,旁车并线控制器采用分层设计,其结构如图1所示。

图1 旁车并线控制器结构
图1中,主车运动参数控制器依据主车与旁车的纵向相对车距dx与纵向相对车速vx求取主车期望达到的加速度ad,主车加速度控制器根据ad由动力学模型计算主车期望的节气门开度αd与期望制动压力pd,而节气门开度控制器和制动压力控制器(执行机构控制器)分别由αd和pd控制实车的节气门开度αa和制动压力pa,从而使主车的实际加速度aa跟随ad的变化并调节车速vh以使主车提前适应即将并入主车道行驶的旁车道车辆。在旁车并线控制中,主车加速度控制器和执行机构控制器处理所有涉及具体车辆动力学的求解问题,而主车运动参数控制器只进行车辆运动的计算,因此有利于主车运动参数控制器在不同车辆中的应用。此外主车加速度控制器和执行机构控制器的结构与ACC已有控制功能中的相应部分相同且可以共用,因此基于分层的旁车并线控制器可使主车的控制过程进一步简化。由于主车加速度控制器和执行机构控制器已在先前的研究中进行了讨论[8-9],因此本文中主要研究旁车并线控制条件和主车运动参数控制器的设计。
2 旁车道车辆并线意图识别
旁车道车辆是否存在并线行为是进行旁车并线控制的首要判定条件,因此本文中采用机器学习算法,基于模糊支持向量机利用由实际道路环境下采集的旁车并线数据训练并线意图识别器,以期能够客观反映旁车驾驶员的并线行为。并线意图识别器的工作过程如图2所示。
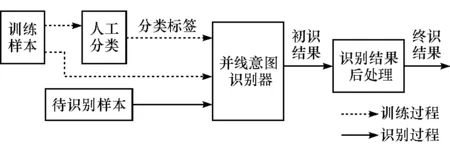
图2 并线意图识别器工作过程
图2中,描述旁车行驶的数据样本分为训练样本和待识别样本,分别由基于车载雷达和自车传感器经Kalman滤波预估得到的主车与旁车纵向相对车距dx、侧向相对车距dy、纵向相对车速vx、侧向相对车速vy、纵向相对加速度ax、侧向相对加速度ay和主车车速vh组成。因此在时刻i得到的训练样本或待识别样本xi可记为
xi=[dxdyvxvyaxayvh]T
(1)
待识别样本为主车在正常ACC控制下得到的描述旁车与主车运动关系的数据,经并线意图识别器判别和识别结果后处理后可判断旁车是否存在并线行为。训练样本由实际道路交通环境中获得,经人工分类标记后用于并线意图识别器的训练。由于并线意图识别器解决二分类问题,故xi的分类标记yi可用1表示正训练样本(并线样本)、-1表示负训练样本(非并线样本)。由此利用支持向量机对并线意图识别器训练时期望得到分类超平面:
ω·x+b=0
(2)
使得所有正、负训练样本分别在此超平面的两侧,同时使训练样本至少与超平面保持单位间距,即所有训练样本点xi均满足:
yi(ω·xi+b)≥1
(3)
为了使得到的分类超平面在未知待识别样本上有最佳的推广能力,要求使距离超平面最近的正、负训练样本间有最大的几何间隔κ。由于式(3)的约束,κ可表示为
κ=2/‖ω‖
(4)
由式(4)可知,最大化κ与最小化‖ω‖等价,由此支持向量机的训练可转化为一个带约束的最小化优化问题:
(5)
然而在由训练样本xi构成的7维空间中,正、负样本间往往存在线性不可分的情况,即并不是所有训练样本都满足式(3)。此时需要通过映射zi=φ(xi)使训练样本向更高维空间转换,以在高维空间中提高zi的线性可分度,同时引入核函数K(xi,xj)来直接计算xi和xj变换至高维空间后的向量点积zi·zj以提高计算效率。此外还可利用大于0的松弛变量εi来容许对部分训练样本点的错分,同时在式(5)中加入惩罚项Cεi来权衡错分点对最优分类超平面的影响,以此来放宽正、负样本线性可分的条件。此外在上述问题的求解中,对所有训练样本点都作等权重考虑,而在旁车开始并线的初始时刻,正、负样本间的差异不大并不能准确反映旁车的并线行为特征,因此其对分类超平面的影响程度也不同。为此引入正样本模糊隶属度系数si,以0~1间的取值描述训练样本xi属于正样本的程度。由此考虑训练样本不等权重的模糊支持向量机的求解问题可描述为
(6)
其对应的凸二次规划寻优对偶问题为
(7)式中αi为Lagrange系数。由所有训练样本对式(7)求解后即可得到最优解αi*,并可由式(3)的约束条件求解b*,此时得到并线意图识别器的分类判别函数为
(8)
式中:xi为对应αi*不为0的训练样本,即支持向量;x为待识别样本。因此模糊支持向量机在进行分类判别时仅需使用数量较少的已知分类标签的支持向量xi及其对应的αi*,利于在实车嵌入式控制中应用。
对得到的并线意图识别器在实际道路交通环境中进行了检验,其中的1组旁车道车辆并线识别结果如图3所示。

图3 旁车道车辆并线识别结果
在图3中旁车初始时处于左车道内,在18.5s时开始向主车道方向移动,并于24.9s时完全进入主车道行驶。并线意图识别器的初识结果Rr虽能大致反映旁车的并线行为,但是受限于有限训练样本对旁车实际行驶中所有并线与非并线行为的代表能力,其识别结果中仍存在很多误识别现象。因此对并线意图识别器的初识结果做如下后处理:在初识结果为-1(没有检测到并线)时,如果并线意图识别器在最近4个周期中有3个检测到并线发生,则将终识结果置1(检测到并线),否则将终识结果置为-1;而当初识结果为1时也做类似处理。由终识结果Rf可以看出,识别结果后处理使并线意图识别的准确率进一步提高。虽然Rf的识别过程相比Rr约有150ms的滞后,但与整体并线过程用时4~6s相比,滞后所占的时间基本可以忽略,因此并不影响在识别到旁车并线行为后对主车的控制。
3 旁车道车辆并线控制策略
由于纵向相对车距dx和碰撞剩余时间Tt(dx/vx)可分别有效反映主车与旁车的相对位置和发生碰撞的危险程度,因此将dx和Tt作为旁车并线控制的输入变量。考虑到模糊控制与人类的推理决策过程较为相似且在控制中不需要使用控制对象的精确模型,因此采用其作为主车运动参数控制器求解ad。
在模糊控制中,模糊推理通过模糊控制规则由经模糊化后的输入变量求解模糊输出,模糊输出经解模糊后可得到数值化的输出变量。在输入变量的模糊化中,考虑到不同dx和Tt对主车行驶安全的影响程度不同,设定其论域分别为[10,70]和[-10.5,-2.5],并用7个语言变量进行描述:负大(NB)、负中(NM)、负小(NS)、中位(M)、正小(PS)、正中(PM)和正大(PB),同时将论域外的输入值保持在论域的边界上。在解模糊时,考虑到旁车并线控制的应用范围及主车驾乘人员的舒适性,设定输出变量ad的论域为[-2.5,0],并用负极大(NVB)、负大(NB)、负中(NM)、负小(NS)和中位(M)5个语言变量进行描述。输入变量与输出变量对各语言变量的隶属度函数μ(·)根据文献[10]中提出的重叠鲁棒性和重叠率进行调节,以使隶属度函数间的重叠鲁棒性在0.3~0.7之间,重叠率在0.2~0.6之间。经调节后的输入输出变量隶属度函数如图4和图5所示。
模糊控制规则主要参考驾驶经验确定,采用if A and B then C的逻辑结构形式(其中A和B为输入,C为输出),经调试后的模糊控制规则如表1所示。

表1 模糊控制规则

图4 输入变量隶属度函数

图5 输出变量隶属度函数
在模糊控制中,模糊推理的模糊蕴含关系采用Mamdani法则,输出变量解模糊采用质心法,得到不同dx和Tt输入下ad的输出曲面,如图6所示。由此可将模糊控制的输入输出关系离散为一个二维查询表,以避免车载嵌入式控制器进行复杂的运算,提高实时控制的效率。

图6 模糊控制输出曲面
在旁车并线控制器检测到旁车的并线意图后,主车进入旁车并线控制还须满足以下条件。
(1) 主车与旁车的纵向相对车速vx小于0且碰撞剩余时间Tt的绝对值小于11s
当vx<0时旁车车速小于主车车速,旁车在并线过程中才有可能与主车发生碰撞。如果此时Tt的绝对值小于11s则说明发生碰撞的风险较大,需要进入旁车并线控制。而当Tt的绝对值大于或等于11s时,虽然dx不断缩小,但主车在旁车完全进入主车道后仍有足够的时间采取控制措施,因此为了保证驾乘人员的舒适性,并不进行旁车并线控制。
(2) 主车与旁车的纵向相对车距dx小于主车与主目标车辆的纵向相对车距dp
在主车道内存在主目标车辆的情况下,只有当dx (3) 旁车并线控制中的期望加速度ad小于前车跟随控制中的期望加速度ap 如果前车跟随控制输出的ap小于旁车并线控制输出的ad,则说明主目标车辆相比旁车对主车的行驶安全威胁更大,因此主车需要首先响应对主目标车辆的控制需求。反之则旁车对主车安全行驶的威胁更大,主车需要进行旁车并线控制。 利用在先前研究中建立的执行机构在环仿真系统[11]针对旁车并线行为进行了未启用与启用旁车并线控制的仿真对比研究,结果如图7和图8所示。图中dp,dd,dx和dy分别为主车与主目标车辆的纵向相对车距、主车的理想车距、主车与旁车的纵向相对车距和侧向相对车距;vh,vs和vp分别为主车车速、旁车车速和主目标车辆车速;aa和ad为主车的实际加速度和期望加速度(其中ap也由ad表示);αa和αd为主车的实际节气门开度和期望节气门开度;pd,pal和par分别为主车的期望制动压力以及左、右侧车轮的实际制动压力;M为主车所处的控制状态,其中0,1,…,6分别代表ACC控制功能关闭、定速巡航控制、前车跟随控制、强减速控制、强加速控制、旁车并线控制和紧急避撞控制。 图7 未启用旁车并线控制仿真结果 图8 启用旁车并线控制仿真结果 在图7与图8的仿真对比中,主车在初始时刻均以80km/h保持定速巡航行驶,而旁车均位于主车前方123m的左车道内以60km/h匀速行驶。旁车在第15s时开始逐渐减速并向主车道内并线,最终减速至51km/h于主车道内匀速行驶。当未启用旁车并线控制时,主车在旁车完全进入主车道后(18.7s)才更新主目标车辆以对主车进行控制,因此主车处于强减速模式的时间为3.8s且dx最小时仅为1.9m,此时主车与旁车具有较高的碰撞风险。而当启用旁车并线控制时,主车在16.7s时即发现旁车的并线行为并进行减速控制以使主车提前适应旁车的行驶状态,由此在旁车进入主车道成为主目标车辆后,主车处于强减速模式的时间减少至2s且dx的最小值增加至11.5m。因此由以上仿真对比可以看出,启用旁车并线控制可在减小对主车驾乘人员舒适性影响的同时有效提高主车的行驶安全性。 为验证旁车并线控制在实车应用中的有效性,在平直路面上进行了有环境车辆参与的实车试验,试验场景和试验结果分别如图9和图10所示,图中各参数的意义同图7和图8。 图9 旁车并线控制实车试验场景 图10 旁车并线控制实车试验结果 在图9中,主车雷达在试验初始时刻检测到距离主车74.5m处以69.8km/h匀速行驶的主目标车辆并在稍后进入前车跟随控制。在74.8s时主车雷达发现了处于右侧车道距离主车29.7m以49.6km/h行驶的旁车,此时旁车已开始向主车道并线行驶。主车在76.4s检测到旁车的并线意图并进入旁车并线控制。此时由于主车与旁车有潜在的碰撞风险,因此旁车并线控制器产生了绝对值较大的减速度以使主车车速迅速降低。在79.6s旁车完全进入主车道并成为新的主目标车辆,此后主车转入前车跟随控制并跟随主目标车辆行驶。 由此可以看出,与只能对主车道目标做出识别和控制的传统ACC相比,旁车并线控制可在准确判断旁车并线行为的同时对主车做出适当的提前控制,从而增加了主车行驶的安全裕量。此外旁车并线控制与传统ACC的其它控制功能间可根据主车行驶工况不同做出及时切换,以保障主车在不同交通环境下的行驶安全。 [1] LOUWERSE W J R, HOOGENDOORN S P. ADAS Safety Impacts on Rural and Urban Highways[C]. 2004 IEEE Intelligent Vehicles Symposium,14th-17th June 2004:887-890. [2] LU Meng, WEVERS K, VANDER HEIJDEN R, et al. ADAS Applications for Improving Traffic Safety[C]. 2004 IEEE International Conference on Systems Man and Cybernetics,10th-13th Oct.2004:3995-4002. [3] XIAO Lingyun, GAO Feng. A Comprehensive Review of the Development of Adaptive Cruise Control Systems[J]. Vehicle System Dynamics,2010,48(10):1167-1192. [4] MARTINEZ John Jairo, CANUDAS-dE-WIT Carlos. A Safe Longitudinal Control for Adaptive Cruise Control and Stop-and-Go Scenarios[J]. IEEE Transactions on Control Systems Technology,2007,15(2):246-258. [5] HIDAS Peter. Modelling Vehicle Interactions in Microscopic Simulation of Merging and Weaving[J]. Transportation Research Part C: Emerging Technologies,2005,13(1):37-62. [6] MOON Seungwuk, KANG Hyoungjin, YI Kyongsu. Multi Vehicle Target Selection for Adaptive Cruise Control[J]. Vehicle System Dynamics,2010,48(11):1325-1343. [7] RAJAONAH Bako, ANCEAUX Francoise, VIENNE Fabrice. Trust and the Use of Adaptive Cruise Control: A Study of a Cut-in Situation[J]. Cognition Technology and Work,2006,8(2):146-155. [8] MA Guocheng, LIU Zhaodu, PEI Xiaofei, et al. Design of the Pressure Regulation Algorithm for Active Braking in Vehicle ACC System[J]. Journal of Beijing Institute of Technology,2011,19(4):483-489. [9] 马国成,刘昭度,裴晓飞,等.汽车自适应巡航控制主动制动实现方法[J].北京理工大学学报,2012,32(2):120-124. [10] KESHMIRI Roozbeh, SHAHRI Alireza Mohamad. Intelligent ABS Fuzzy Controller for Diverse Road Surfaces[J]. International Journal of Mechanical Industrial Science and Engineering,2007,1(5):48-53. [11] 马国成,刘昭度,裴晓飞,等.汽车自适应巡航中执行机构在环仿真与前车跟随控制器设计[J].北京理工大学学报,2013,33(7):675-679. A Research on the Side-lane Vehicle Cut-inControl in Adaptive Cruise Control System Zou Yuan1, Wei Shouyang1, Ma Guocheng1, Liu Zhaodu1& Zhang Dong2 1.BeijingInstituteofTechnology,CollaborativeInnovationCenterforElectricVehicles,Beijing100081 2.BAICMotorSalesCo.,Ltd.,Beijing100028 To remedy the defect of adaptive cruise control (ACC) regarding the time-lag in controlling side-lane vehicle cut-in maneuver and fully utilize its original functions, a side-lane vehicle cut-in controller based on hierarchy structure is designed. The controller is then trained by fuzzy support vector machine with side-lane vehicle cut-in data acquired under real traffic environment, with a cut-in intent identifier generated for detecting the cut-in maneuver of side-lane vehicle. With the longitudinal relative distance between host vehicle and side-lane vehicle and impact remaining time as inputs, and utilizing the desired acceleration generated by fuzzy control to adjust the desired movement state of host vehicle, the dynamics control of host vehicle is fulfilled by ACC system. The results of simulation and real vehicle test show that the side-lane vehicle cut-in controller designed can work coordinately with other functions of ACC system, effectively improving the driving safety of host vehicle under the condition of cut-in maneuver of side-lane vehicle. driver assistance system; side-lane vehicle cut-in control; cut-in intent detection; adaptive cruise control *国家自然科学基金(51375044)和国防基础科研项目(B20132010)资助。 原稿收到日期为2014年5月8日,修改稿收到日期为2015年4月29日。4 仿真对比研究


5 实车试验与结论


