五自由度机械手的PLC控制
2017-01-12杨新军
摘 要:首先分析了该系统的工程应用意义及价值,然后对系统硬件和软件进行了设计,采用步进电机控制机械手底座的水平移动及旋转移动,采用直流电机控制机械手的手臂,用舵机控制机械手的手爪。设计了PLC的外部接线,采用顺序控制的编程方法编写了控制程序。并且建立了两台PLC的PPI网络通信。设计了触摸屏监控画面,实现了对机械手的实时监控。
关键词:PLC;机械手;步进电机;组态控制
DOI:10.16640/j.cnki.37-1222/t.2016.24.043
1 引言
机器人是在机械化、自动化发展浪潮中涌现出来的一种新型装置,它的出现大大解放了生产工人的劳动,提高了劳动生产率。机器人技术是未来高技术、新兴产业发展的基础之一,对于国民经济和国防建设具有重要意义。我国在863计划、国家自然科学基金、国家科技重大专项等规划中对机器人技术研究给予极大的重视[1]。
随着工业4.0和我国的“中国制造2025”战略的部署,我国大力发展制造业,而我国的制造业正处在上升期,随着市场竞争的激烈、劳动力成本的逐年上升以及用户对个性化、定制化的需求越来越迫切,老龄化社会的形成,一线工人减少的趋势不可逆转,我国制造业迫切需要升级改造,来提高经济效益,因此,对机器人产业具有迫切的需求。
2 系统的控制要求
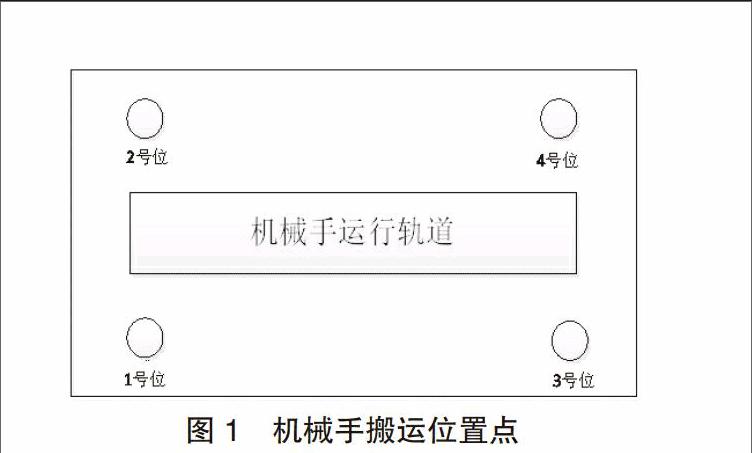
要求机械手在4个工位之间依次搬运工件,控制程序具有“复位”“启动”“停止”“急停”功能。
机械手在运动过程中,按“停止”按钮,五自由度机械手完成当前动作后停止运行,按“启动”按钮,五自由度机械手继续下一步动作。
在五自由度机械手运动时,按下“急停”开关,五自由度机械手立即停止移动及转向,此时如需再次运行机械手,需亲手将本次搬运途中掉下的工件拿到1号物料台,再按“复位”按钮“复位”完成后,按启动可重新运行。
系统采用两台S7-200PLC,一台作为从站对机械手进行控制,另一个台作为主站监控机器人的运行状态。触摸屏与主站PLC连接,实现对主站PLC和从站PLC的实时监控,并控制PLC按上述流程完成搬运任务。
利用触摸屏,可以对系统进行“复位”、“启动”、“停止”“急停”等操作,并可以在触摸屏上实时显示当前五自由度机器人的运行状态。
3 硬件设计
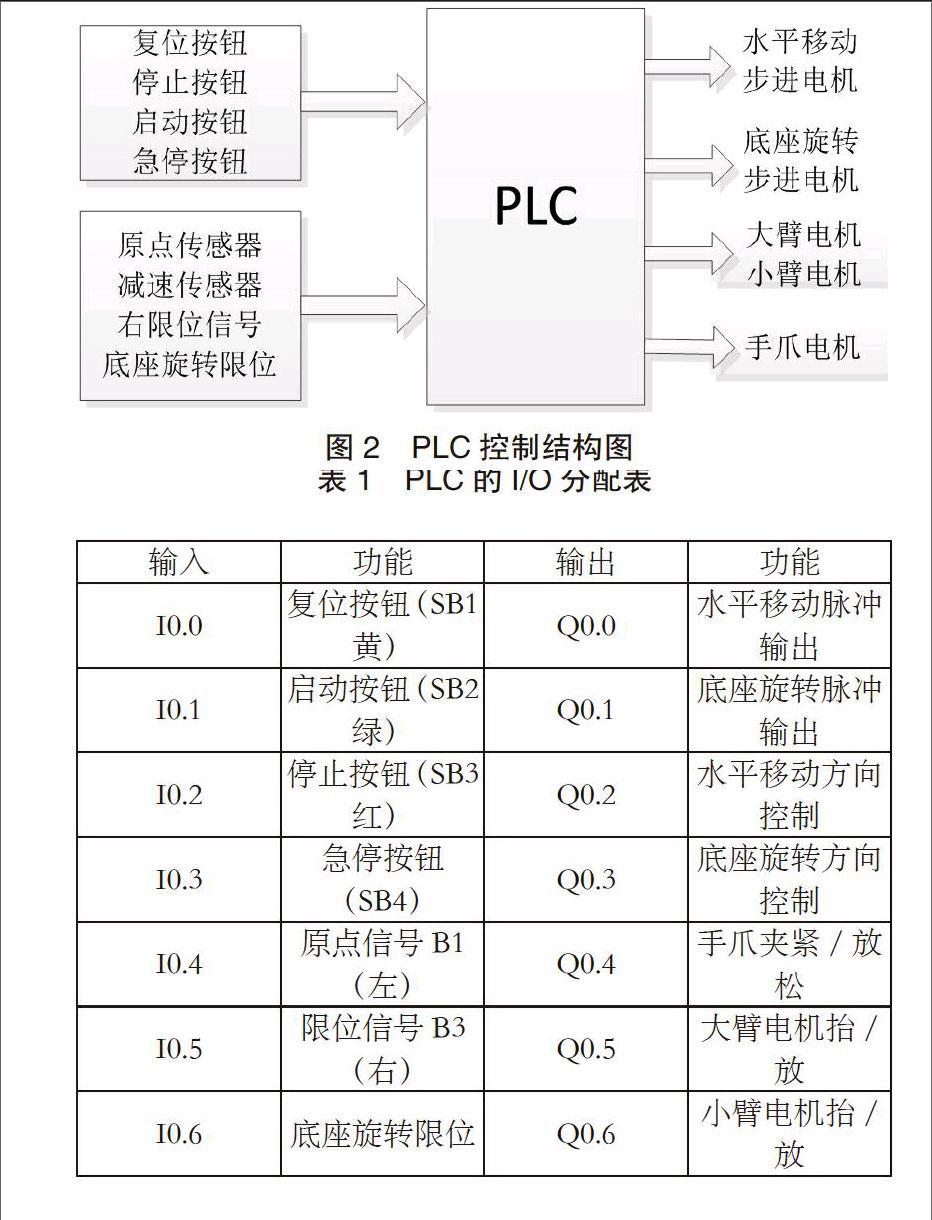
系统输入需要有四个按钮分别控制系统的“复位(SB1)”“启动(SB2)”“停止(SB3)”“急停(SB4)”功能;还需有四个传感器分别作为“原点”“右限位”“底座旋转限位”的限位与控制。
机械手有五个自由度,分别是基座水平移动、基座旋转、大臂抬放、小臂抬放、手爪夹紧和放松。基座的水平移动和旋转由步进电机来控制,步进电机分别由PLC的两个高速脉冲输出点Q0.0和Q0.1控制其速度;大臂和小臂由直流电机控制。手爪由舵机控制。
PLC控制结构图如图2:
为节约成本,该系统只有水平移动和底座旋转采用步进电机驱动,S7-200PLC只有两个高速脉冲输出点,其他三个自由度包括大臂抬放、小臂抬放以及手爪电机通过PLC的普通输出点进行控制。
4 PLC的软件设计
PLC软件采用模块化程序设计,由主程序模块和6个子程序模块组成,子程序包括水平移动、水平停止、旋转移动、旋转停止、水平复位、水平减速。程序结构图如图3:
5 系统的网络结构与组态
西门子S7-200系列PLC支持多种通信协议,协议定义了主站与从站两类通信设备,主站可以对网络上另一台(或多台)设备从站发出命令,从站则响应来自主站的命令。主、从站间的专用通信协议有PPI协议、MPI协议、PROFIBUS协议和自由口协议。在实际应用中,S7-200经常采用PPI协议进行通信。S7-200通过PPI通信可以发挥其强大的通信功能,实现PLC与PLC、PLC与PC、PLC与其他智能设备之间的信息交换,组成集中管理的多级分布式PLC网络控制系统[2]。
该系统的网络结构如图4所示,采用两台PLC,一台作为从站用于控制机器人的动作,另一台作为主站对从站的状态进行监控,用计算机在S7-200CPU处于STOP模式时对PLC进行编程,并对触摸屏进行组态。
组态技术的发展与应用极大地提高了工业控制系统的自动化水平。目前,基于组态技术,以PLC为核心的计算机测控系统一般是利用单台PLC或PLC-PLC网络完成信号的前沿采集、检测与控制功能,PC机和组态软件只用于系统的监控与历史数据管理。该系统采用MCGS软件进行组态,组态流程如图5所示。
6 结术语
基于MCGS组态监控的机械手主从网络控制系统在山东英才学院PLC实验室调试通过并实际运行。该系统成本低廉,运行稳定,采用MCGS进行系统开发,方便、快捷,可以在工程应用中推广使用。
参考文献:
[1]谭民,王硕.机器人技术研究进展[J].自动化学报,2013,7(39):7.
[2]朱奕丹,吴凯波.主从式S7-200PPI通信与MCGS监控组态设计[J].自动化技术与应用,2006(25):5.
项目支持:山东英才学院校级科研立项 (14YCYBZR06)
作者简介:杨新军(1977-),副教授,研究方向:控制理论与检测技术。
