基于旋转变压器的核电站蒸发器传热管涡流检测机械手位置检测研究
2016-04-01秦华容吴海林张军
秦华容 吴海林 张军

【摘 要】本文介绍一种用于核电站蒸发器传热管涡流检测定位机械手上直流有刷电机转子位置检测的方法,该方法采用旋转变压器11-BHW-40HS/F447来检测定位机械手关节位置。重点介绍了旋转变压器数字转换器AD2S1210及其相关参数的选择,并设计了AD2S1210与旋转变压器11-BHW-40HS/F447之间的接口电路,将旋转变压器输出的模拟量信号转换为数字位置信号送给控制系统,最终实现了定位机械手的位置检测。实验结果表明,系统设计合理,旋转变压器和AD2S1210组成的数字位置检测电路正确可行。
【关键词】旋转变压器;AD2S1210;接口电路;模拟/数字信号处理器
0 引言
在核电站蒸发器传热管涡流检测定位机械手系统中,需要实时地检测电机转子位置及转速,以实现转矩、速度的闭环控制。通常的检测方法是使用光电编码器,而常用的正交光电编码器启动时需要一段时间进行转轴定位,而且抗冲击震动性差,容易损坏,因此,在环境比较恶劣[1]、需要快速响应的高速运行且对抗震要求较高的场合,例如,蒸发器传热管涡流检测系统中,往往使用旋转变压器。
旋转变压器的输出是含位置信息的模拟信号,需要将其转换为数字信号才可输入到运动控制卡单元。本文采用AD2S1210旋转变压器数字转换器将模拟量信号转换成16位数字位置信号,同时运动控制单元采用美国GALIL公司的DMC-2143卡,可满足系统对转子位置与速度信号实时快速检测和处理的要求。实验表明该方案确实可行,并且具有较高的控制精度。
1 旋转变压器的原理
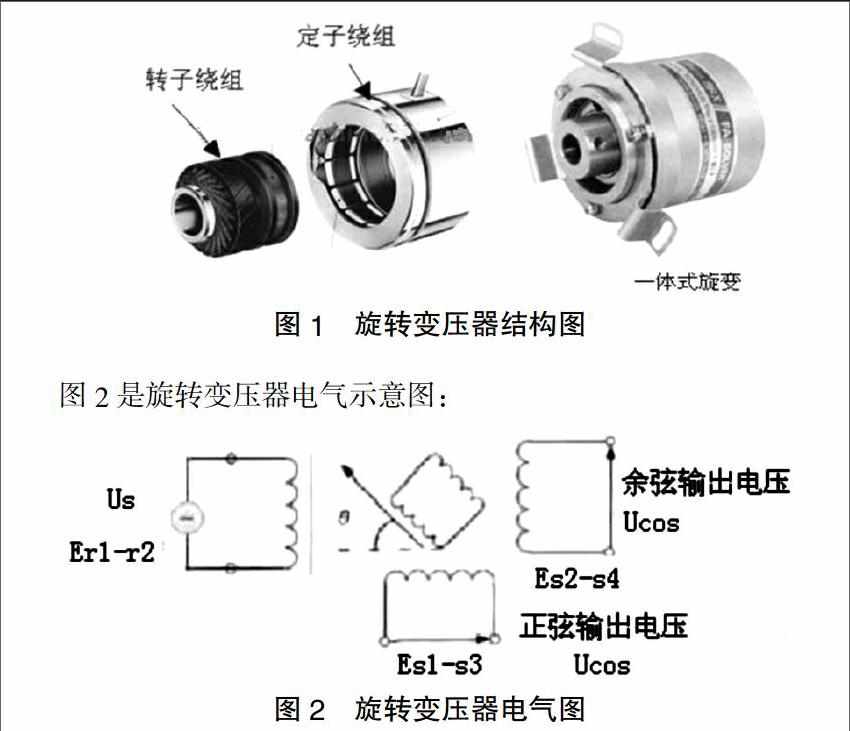
旋转变压器是一种特殊的旋转电机,有定子和转子两部分,并且两者相互独立,一次极和二次极线圈都绕在定子上,转子由两组相差90°线圈组成,采用无刷设计[2],如图1所示:
图2是旋转变压器电气示意图:
旋转变压器的输入输出电压之间的具体函数关系如下所示:
设转子转动角度为?兹,初级线圈电压(即励磁电压)。
ES1-S3=KEsin2πftcosθ
ES2-S4=KEsin2πftsinθ
式中:f—励磁频率;
E—信号幅度。
那么输出电压:
ER1-R2=Ksin2πft
式中:K—传输比;
?兹—转子偏离原点的角度。
公式中f为信号频率,即励磁信号频率,信号幅度为E,包络信号为和,解码器就是通过检测这两组输出信号获取旋变位置信息的。励磁频率越高,旋变解码精度也就越高,而励磁电压幅度则对解码没有明显的影响,只需达到一定的电压数值即可[3]。该涡流传热管机械定位手系统中选用Litton公司的11-BHW-40HS/F447作为旋转变压器来检测机械手的位置,其参数如下:ROTOR:1 PHASE,1.88 VOLTS;STATOR:2 PHASE,2.63 VOLTS,频率为2250HZ。
2 基于旋转变压器的涡流传热管定位机械手检测系统
涡流传热管机械手定位检测系统主要由两关节定位机械手、控制系统、监视系统、控制PC机、涡流采集工作站、涡流分析工作站和气源系统等组成。检测系统连接示意图如图3所示:
控制PC机中控制软件发指令给控制系统,控制系统驱动机械定位手运动,当运动到控制软件中指定的蒸发器传热管位置后,输送涡流探头至传热管中(机械定位手作为载体,携带探头运动)。涡流探头反馈回来的检测信号送给涡流仪,处理之后最终送到涡流采集、分析工作站,从而完成一次涡流自动检查。摄像头系统主要用来监视定位机械手的运动状态,并将视频图像显示在监视器中,提供给操作人员观看。
PC机中发轨迹指令给GALILA控制卡,控制卡转换后发指令给驱动器,从而驱动关节电机运动。同时机械定位手中旋转编码器用来检测两个关节的位置信息,检测到的关节位置信息为模拟量信号,送到基于AD2S1210的解码板解码成数字量信号后,送给GALIL控制卡,从而形成闭环控制,实现精确定位,控制系统原理框图如图4所示。
3 基于AD2S1210的解码板接口电路设计及机械手定位精度测试
3.1 AD2S1210解码芯片特点
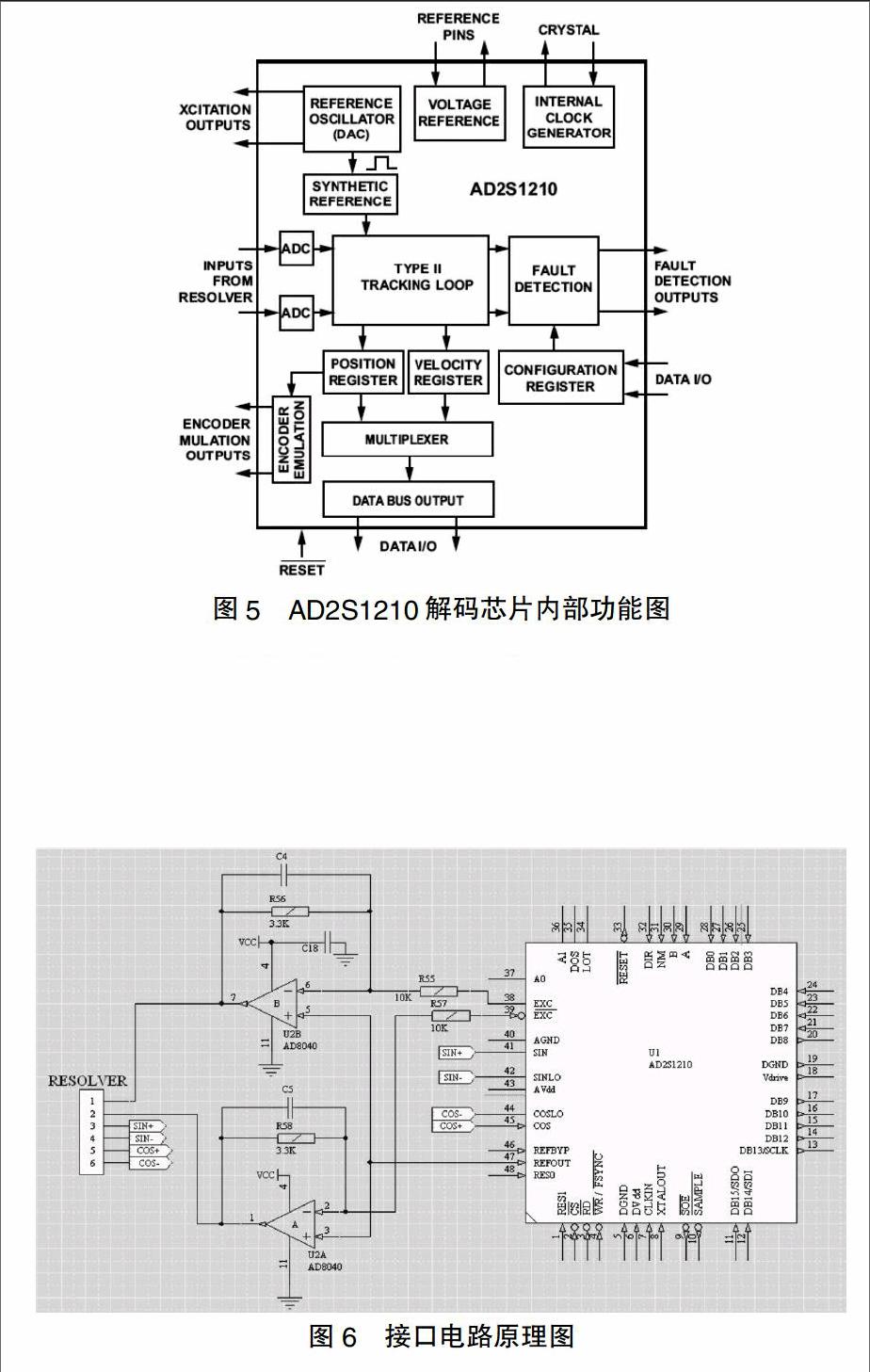
AD2S1210解码芯片是一款10位至16位分辨率旋变数字转换器,集成片上可编程正弦波振荡器,为旋转变压器提供正弦波激励。转换器的正弦和余弦输入端允许输入3.15±27%、频率为2KHZ至20KHZ范围内的信号。Type II伺服环路用于跟踪输入信号,并将正弦和余弦输入端的信息转换为输入角度所对应的数字量,最大跟踪速率为3125rps。AD2S1210解码芯片内部功能图如图5所示。
3.2 AD2S1210芯片和旋转变压器接口电路设计
为了给旋转变压器的励磁绕组提供满足要求的高品质正弦波励磁信号,同时使所接收到的旋转变压器正/余弦信号能够满足芯片对输入信号幅值与相位的要求,需要加入额外的信号处理电路。AD2S1210和旋转变压器接口电路设计如图6所示。
AD2S1210的激励输出通常在和/输出端提供3.6正弦信号,这将产生一个7.2差分信号。11-BHW-40HS/F447旋转变压器转换比为,如果将增益为1的缓冲器配合AD2S1210使用,则旋变输出正、余信号的幅度约为差分,而AD2S1210转换器允许的正弦和余弦输入电压应具的幅度,显然不满足转换器的电压输入要求,因此旋转变压器和转换器之间的缓冲器电路大约应提供的增益。如图6中所示,选用AD8040放大器作为缓冲电路,其增益由电阻和(或者和)来设定。本机械手定位检测系统中,根据前面介绍的旋转变压器参数,选取,计算可知缓冲电路的增益为,则11-BHW-40HS/F447旋转变压器输出的正、余信号的幅度约为差分,满足AD2S1210转换器允许的正弦和余弦输入电压幅度要求。
电容C4与电阻R56并联,C5与电阻R58并联形成一个低通滤波器,用来滤除EXC和EXC 输出上可能存在的任何噪声。应谨慎选择此滤波器的截止频率,确保滤波器所引起的载波相移不超过AD2S1210的锁相范围。
11-BHW-40HS/F447旋转变压器经过AD2S1210芯片解码后,输出的信号经过缓冲(通过芯片74HC573实现)和光电隔离等信号处理之后,即可输出16位数字量信号送给控制系统,实现机械手电机关节位置的检测。
3.3 机械手定位精度测试
基于上面介绍的接口电路,本系统中设计了基于AD2S1210的旋转变压器信号解码板,按如下图7所示,任意选取一行(如46行),在该行上任意选取10列,对本系统中的两关节机械定位手定位精度进行了测试,测试示意图如下图7所示。
相邻两管子的管间距=27.43mm;半个管径=9.65mm。
在控制系统中,对机械手做完两点标定后,将探头门对准R46C29(任意选取),在ROW(行不变)和COL(列递增)方向做标记;移动到R46C30并对探头门做出相应标记;依次在该行上取10列管子逐次做出相应标记;完成后测出相应数据得出ROW和COL方向的测量数据,并按下面的公式计算出机械手在移动过程中在ROW和COL方向的走位偏差,测试结果如表1所示,其中相邻两管子的管间距和管径为传热管的结构尺寸(测量可得)。
ROW偏差量=相邻两管子的管间距(27.43mm)-1/2R(半个管径9.65mm)-Rx。
COL偏差量=Cx-相邻两管子之间的间距(27.43mm)。
4 结论
本文作者在自主研发的涡流传热管机械手定位检测系统的基础上,设计并制作了基于AD2S1210芯片的旋转变压器数字转换器,对机械手两个电机关节位置进行实时检测并解码,实验证明该解码方法稳定可靠,且解码精度比较准确,完全满足核电站蒸汽发生器涡流传热管检测定位精度要求。
【参考文献】
[1]金进强,等.旋转变压器信号接口电路的设计与实现[J].电脑开发及应用,2007,20(5):54-55.
[2]敖荣庆,等.伺服系统[M].北京:航空工业出版社,2006.
[3]秦继荣,等.现代直流伺服控制技术及其系统设计[M].北京:机械工业出版社,1993.
[责任编辑:王楠]
