基于LPV增益调度的风电机组控制验证与仿真分析
2016-03-21陈忠雷华北电力大学可再生能源学院北京102206
邓 英,周 峰,陈忠雷,田 德,高 尚(华北电力大学可再生能源学院,北京 102206)
基于LPV增益调度的风电机组控制验证与仿真分析
邓英,周峰,陈忠雷,田德,高尚
(华北电力大学可再生能源学院,北京 102206)
摘要:随着风力发电机组装机容量的持续增加,风力发电机组出力特性及其优化运行成为行业关注的热点。针对湍流风下风电机组的动态响应特性,提出抑制风湍流的LPV增益调度控制方法。基于2 MW风电机组模型进行控制器设计,分别采用PI控制算法与LPV控制算法进行仿真计算。机组载荷的波动主要集中在风轮旋转频率1 P的倍频上。仿真计算结果表明在不同风速下,机组显示出不同的运行特性。在低风速时,塔影效应的作用较为显著,在高风速时,湍流对载荷的影响较为明显。相比于PI控制,LPV控制能够跟随机组运行状态调整控制参数,能更好的抑制湍流对机组的影响。在16 m/s湍流风下,功率和齿轮箱低速轴转矩在3P分量上分别降低了35.1%和41.8%。因此,在LPV控制下,齿轮箱的疲劳损伤降低了,发电机的功率波动减缓了。能够增加风电机组的预期寿命,对电网也更加友好。
关键词:风电机组;算法;模型;湍流;LPV增益调度;载荷控制
邓英,周峰,陈忠雷,田德,高尚. 基于LPV增益调度的风电机组控制验证与仿真分析[J]. 农业工程学报,2016,32(3):29-33.doi:10.11975/j.issn.1002-6819.2016.03.005http://www.tcsae.org
Deng Ying, Zhou Feng, Chen Zhonglei, Tian De, Gao Shang. Verification and simulation analysis of wind turbine control based on linear parameter varying gain scheduling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(3): 29-33. (in Chinese with English abstract)doi:10.11975/j.issn.1002-6819.2016.03.005 http://www.tcsae.org
0 引 言
目前全球气候变暖,以风能、太阳能为主的可再生能源快速发展。据CWEA统计,2014年中国(不包括台湾地区),新增装机容量2 335万kW,累计装机容量1.15亿kW,两项数据均居世界第一[1-2]。世界风电技术呈现如下特点:风电机组单机容量持续增大,设计和制造技术不断提高,风电的优化运行成为行业关注的热点。但是,风的湍流特性影响了风电机组发电运行和出力特性,因此,研究风湍流下风力发电机组发电出力特性,提出应对的控制策略,对提高风电机组发电量和运行寿命很有必要。
国标GB/T18451.1风电机组设计要求中,规定轮毂高度处的湍流强度,作为风力发电机组安全分级的重要参数;要求采用湍流风模型包括Von Karman、Kaimal和Mann谱等作为极端载荷与疲劳载荷的计算输入[3-6]。风湍流作用造成了风电的波动性和间歇性,使风电设备制造和运行维护受到挑战。国内外对风电机组控制做了大量的研究[7-8]。蔡继峰、张宇[9]研究了Von Karman、Kaimal湍流风在载荷计算中的差异,并提出了叶片、轮毂和塔架的疲劳载荷的设计认证要求。风电机组单机容量的持续增大,风电机组塔架越来越高,叶片半径越来越大,其可靠性受湍流的影响越来越显著,Eggers等[10]指出风切变增加会引起风力发电机组叶片面外力矩增加,而湍流则是引起风力发电机组叶片振动扭矩和推力的主要原因。邓英等[11-13]分析了极端湍流风下风力发电机组的设计载荷和叶尖距塔筒极限距离的响应特性。因此,风湍流是造成风电机组各部件疲劳损伤、可靠性降低和发电出力特性差的主要原因之一。常规的PI(proportional integral)控制用于线性时不变系统的调控,而风电机组中气动系统是非线性的,且气动系统的参数随着运行状态在时刻变化。以2 MW双馈式风电机组为例,提出抑制风湍流的LPV(linear parameter varying)增益调度控制算法,仿真结果表明,LPV增益调度相比于常规的PI控制算法,可以有效的降低齿轮箱的疲劳载荷。
1 LPV控制算法
1.1LPV系统
线性变参数系统可以用来描述一个非线性系统[14]。开环LPV系统可描述为

式中x表示状态;w表示扰动;u表示控制输入;z表示偏差输出;y表示测量信号;θ(t)表示调度参数;t表示时间;A,B,C,D表示系数矩阵。
调度参数θ的边界条件为

式中V表示调度参数变化率的集合,即系统的调度参数满足(θ ,)∈Θ× V 。
LPV系统所需要的控制器形式为

式中下标c表示控制器。
综合开环系统和控制器得到闭环系统的状态矩阵形式

式中下标lc表示闭环。
对于一个闭环系统,如果存在一个对称矩阵X且
那么闭环系统系数矩阵Alc就是参数依赖二次稳定(PDQ,parameter dependent quadratic)。在零初始条件下,具有PDQ稳定的LPV系统,诱导2范数定义为
式中I表示单位矩阵。
1.2LPV控制器
这一节介绍LPV控制器的求解。为了简化书写,公式中不再标出调度参数θ。
闭环LPV系统的系数矩阵如下
对于n×n维的开环系数矩阵A,选择一个李雅普诺夫矩阵χ分割成如下形式

因为对称矩阵满足χχ-1=I,所以I−XY=NMT。X,Y以及诱导2范数的边界γ满足下列条件

式中NX是[C2D12]零空间的基,NY是[B2D21]T零空间的基,*表示无关项。在不等式约束条件下可求解得到X,Y,γ。

根据辅助系数矩阵与控制器矩阵系数矩阵的关系式(16)~(19)可得到控制器。
2 LPV增益调度算法的仿真分析
2.1风电机组的建模
实际中运行的风电机组安装在吉林某风电场,机组主要参数如表1所示。
依据表1在风电机组仿真软件Bladed中搭建模型。以平均风速15 m/s,湍流度0.155的Kaimal湍流模型作为风输入,控制器为LPV控制。仿真计算结果与机组现场运行数据对比如图1。
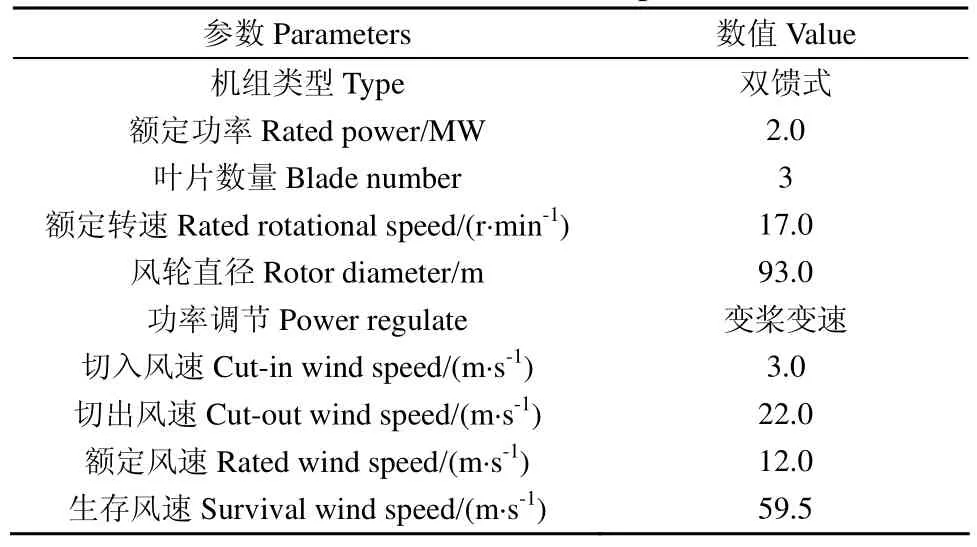
表1 2 MW风力发电机组总体参数表Table 1 2 MW wind turbine parameters
2.2控制器设计
根据风电机组各子系统的机理,得到整个机组的线性化模型[14]:

输入量u有3个:v为风速,m/s;Tg为发电机需求转矩,N·m;βd为需求桨距角,rad。其中风速作为扰动量输入。
系数矩阵包含以下量

式中FT为风轮产生的轴向推力,影响塔架的前后运动。Tr为风轮产生的气动转矩,是传动链主要传递的载荷,与发电功率息息相关。BT、Br、kT,V、kr,V、kT,β、kr,β分别为对应工作点(ω,β,V)下的偏导数。从式(26)可以看出,这几个参数是随着运行点在变化的。式(23)作为LPV开环系统,依据第2节的过程设计控制器。
2.3仿真结果验证
从图1中的响应曲线中可以看出,仿真计算的风速与实际中的风速基本一致。发电机功率:实测数据平均值为2 049 439 W,标准差16 189 W;仿真计算平均值为1 998 591 W,标准差13 279 W。发电机转矩:实测数据平均值为11 222 N·m,标准差38.97 N·m;仿真计算平均值为11 245 N·m,标准差31.52 N·m。其中,实际机组的额定功率偏高,与标称数据有偏差。从图1中响应情况及标准差可以看出,LPV控制下的仿真计算结果与实际运行数据相似。因此,仿真软件中所搭建的模型与实际机组相近。
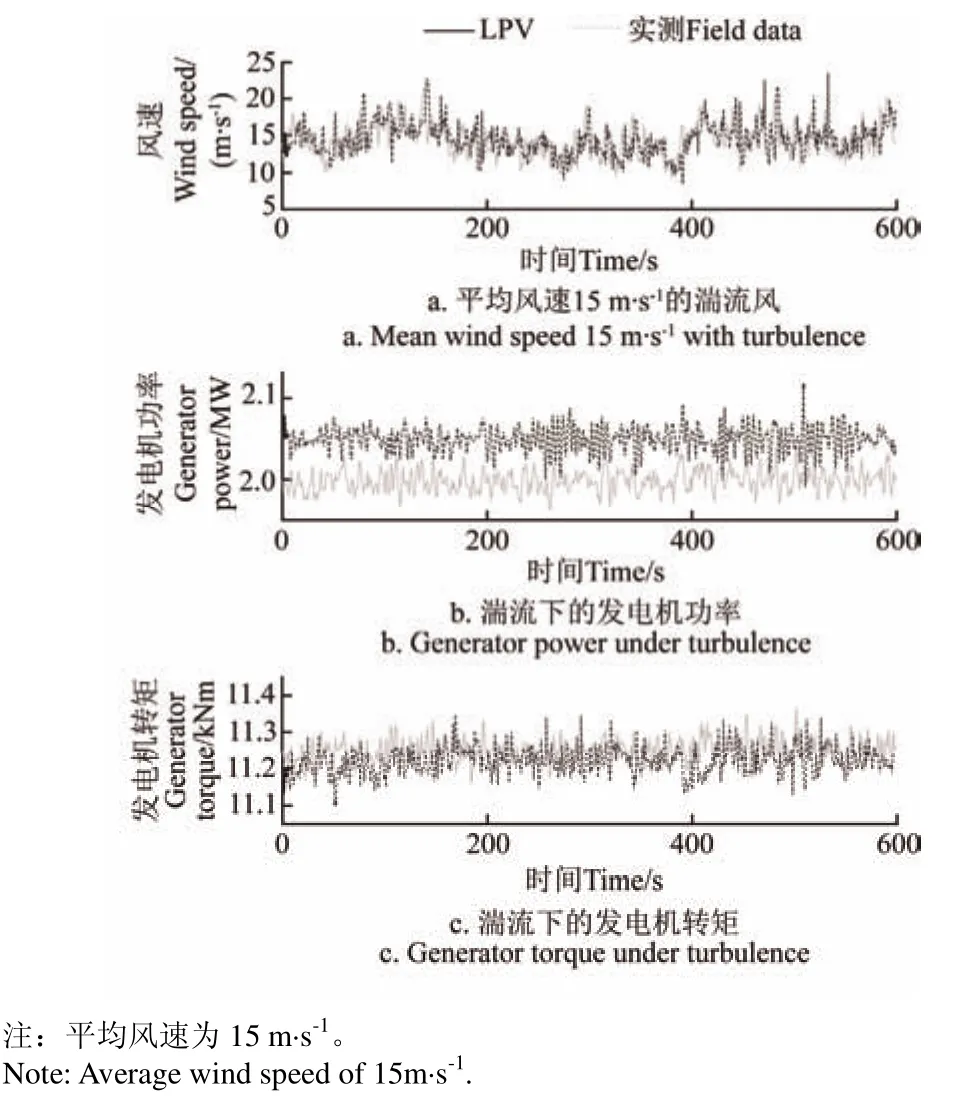
图1 风电机组现场运行数据和仿真数据的对比Fig.1 Comparison between wind turbine field data and simulation data
分析实际运行机组的数据可知,由于湍流风的作用,发电机转矩在11.1~11.35 kN·m间波动,波动的载荷在传递系统上产生疲劳损伤,同时影响了风电机组发电功率,功率波动最大达到3%。湍流引起的波动,会造成齿轮箱的疲劳损伤,电能质量也有所下降。
2.4机组运行的仿真结果分析
由于风电机组现场实测数据有限,不便于对比不同控制器的控制效果。仿真结果验证了模型的仿真计算是可靠的,后续的仿真计算以常规的PI控制器作为基准,再以LPV控制算法编写新的控制器。风电机组主要参数如表1所示,以标准IEC61400-1中的要求,设计表2中的2种风况为仿真计算的风输入,将控制器加载到Bladed中进行仿真计算。
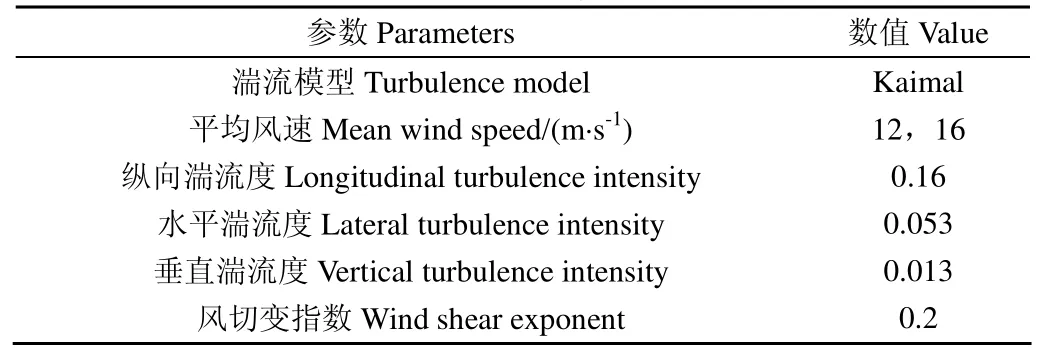
表2 仿真设计风况Table 2 Simulation design wind conditions
从时域可以看出,PI控制下,发电机的转速转矩有较大的波动,从而发电机的输出功率也大幅度的波动。在不同风速下,气动转矩随桨距角的变化率不一样。因而针对不同运行点需要匹配的控制参数才能得到好的控制效果。相比于PI控制,LPV控制使得发电机的转速转矩更加平稳,从而可以输出高质量的电能,同时机组的载荷波动也减缓,降低了疲劳损伤[15-16]。

图2 12 m·s-1湍流风下发电机运行状态Fig.2 Generator state at 12 m·s-1turbulence
从频域观察机组的运行状态,机组风轮旋转频率(1P,one period)的3倍数对机组输出特性的影响很大,LPV控制可以有效降低3倍频的影响,从而稳定了功率输出并降低了机组的疲劳。接近额定风速时,谱峰出现在机组风轮旋转频率的倍频处。因此塔影效对机组的影响较为显著,而湍流的影响不是很明显,此时LPV控制主要作用在于改善塔影效应。而在高风速时,可以从PI控制的频谱图中看出,高频分量占有较大比重,可知湍流的影响比较明显,谱峰不再显著的集中于机组风轮旋转频率的倍频处。LPV控制降低了高频的谱密度,即抑制了湍流引起的波动。
表3列出了16 m/s湍流下发电功率和齿轮箱低速轴的傅里叶级数展开量。3P分量在谐波分量中占有很大比例,应用LPV控制器后,功率谱中的谐波分量得到了抑制,尤其是3P分量降低了35.1%。同样的,低速轴转矩的3P分量降低了41.8%,而1P分量却增加了33.8%,但占比较小,考虑整体效果,载荷波动是减缓的。因而LPV控制算法能有效降低载荷波动,进而减少齿轮箱的疲劳损伤。
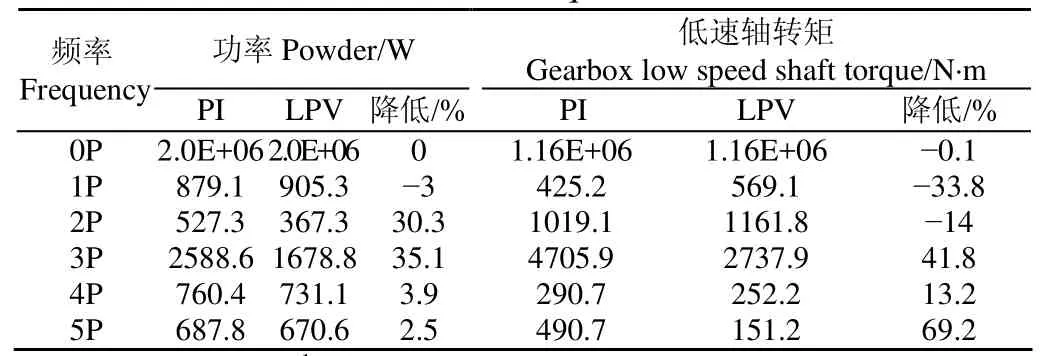
表3 发电机功率和齿轮箱低速轴转矩波动情况Table 3 Fluctuations of generator power and gearbox low speed shaft torque
3 结 论
风电机组的是一个非线性系统,而风速是一个随机性和波动性的输入量,机组的运行状态时刻在变化着,尤其是风轮部分受风速以及结构载荷耦合作用的影响,气动性能时刻在变化。因而引入LPV增益调度控制算法,应用于风电机组控制。
1)根据风电机组运行参数的频域分析,机组的载荷波动主要集中在3P的倍频上,LPV增益调度控制能够很好的抑制3P上的载荷,降低载荷中非常数分量即减少了载荷的波动。
2)载荷波动减缓了,齿轮箱的疲劳损伤降低,减少了需要维护的工作量,可以增加机组的预期寿命。并且发电功率也更加平稳,对于整个风电场而言,功率波动减小,对电网也更加友好。从整体而言,风电的度电成本可以有效的降低。
由于3个叶片上的风速是不一样,集中变桨并不能有效的平衡3个叶片间的载荷差距,后续的研究可以考虑应用独立变桨,可望进一步改善机组的出力特性。
[参考文献]
[1] 中国可再生能源学会风能专业委员会(CWEA). 2014年中国风电装机容量统计[J]. 风能,2015,6(2):36-49.
[2] 祁和生,沈德昌. 2009-2010年国内外风电产业发展报告[R].中国农机工业学会风能设备分会,2011.
[3] IEC61400-1 third edition 2005-08, Wind Turbine– Part 1: Design requirement[S].
[4] IEC 61400-1 Amd.1 Ed. 3.0 en: 2010 Amendment 1, Wind turbines Part 1: Design requirements[S].
[5] IEC61400-12-1 Ed.1, Wind turbine-Part 12-1: Power performance measurements of electricity producing wind turbines[S].
[6] Mann J. The spatial structure of neutral atmospheric surface-layer turbulence[J]. Journal of Fluid Mechanics, 1994, 273: 141-168.
[7] Pao L Y, Johnson K E. Control of wind turbines[J]. Control Systems, IEEE, 2011, 31(2): 44-62.
[8] Song Y D, Li P, Liu W, et al. An overview of renewable wind energy conversion system modeling and control[J]. Measurement and Control, 2010, 43(7): 203-208.
[9] 蔡继峰,张宇. Kaimal和Von Karman湍流谱模型在风电机组载荷计算中的差异[J]. 风能,2012,3(3):80-84.
[10] Eggers A J, Digumarthi R, Chaney K. Wind shear and turbulence effects on rotor fatigue and loads control[C]//2003 Wind Energy Symposium, American Society of Mechanical Engineers, 2003: 225-234.
[11] Deng Ying, Xie Ting, Zhang Guoqiang, et al. Blade tip deflection calculations and safety analysis of wind turbine[C]// IET Renewable Power Generation Conference, 2013.
[12] 邓英,周峰,田德,等. 不同风湍流模型的风电机组载荷计算研究[J]. 太阳能学报,2014(12):2395-2400. Deng Ying, Zhou Feng, Tian De, et al. Research on load calculation of wind turbine for different wind turbulence model[J]. Acta Energiae Solaris Sinica, 2014(12): 2395-2400. (in Chinese with English abstract)
[13] 何伟. 湍流风场模拟与风力发电机组载荷特性研究[D].北京:华北电力大学,2013. He Wei. Research on Turbulent Wind Field Simulation and Load Characteristics of Wind Turbines[D]. Beijing: North China Electric Power University, 2013. (in Chinese with English abstract)
[14] Bianchi F D, De Battista H, Mantz R J. Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design[M]. Springer Science & Business Media, 2006.
[15] Shirazi F A, Grigoriadis K M, Viassolo D. Wind turbine integrated structural and LPV control design for improved closed-loop performance[J]. International Journal of Control, 2012, 85(8): 1178-1196.
[16] Cao G, Grigoriadis K M, Nyanteh Y D. LPV control for the full region operation of a wind turbine integrated with synchronous generator[J]. The Scientific World Journal, 2015, ID 638120. http://dx.doi.org/10.1155/2015/638120
Verification and simulation analysis of wind turbine control based on linear parameter varying gain scheduling
Deng Ying, Zhou Feng, Chen Zhonglei, Tian De, Gao Shang
(Renewable Energy School, North China Electric Power University, Beijing 102206, China)
Abstract:With the installed capacity of wind turbines increasing, the wind turbine output characteristics and optimal operation obtain much more concerns in the industry. This paper discusses the influence of wind turbulence on the performance of wind turbines. Wind turbine is a complex nonlinear system. Due to structure load coupling, wind variation and pitch actions, the parameters of aerodynamic subsystem are changing with operation state. Usually, PI (proportional integral) control algorithm is satisfied for a linear time invariant system. To obtain better performance, a nonlinear system needs an advanced control algorithm. To address this issue, we propose a linear parameter varying (LPV) gain scheduling control to mitigate the influence of wind turbulence on wind turbine performance. At different wind speed with variable pitch and rotor speed, the LPV control can adjust feedback gain to satisfy the changing operation point. First, we introduce the stability of LPV system and LPV controller design process. Once the stability conditions are reached, the closed-loop system is stable. Then, we derive a control model with a 2 MW wind turbine based on an actual double-fed induction generator. The input is a recommended turbulence model, Kaimal. In order to check the simulation model, the field data are compared with simulation results. The generator power and torque have similar statistic characteristics. So the model is suitable for simulation and the simulation results are credible. According to the analysis of field data, wind turbulence has a great impact on wind turbine performance, such as fatigue damage of gearbox and decreasing power generation efficiency. Therefore the economic benefits are reduced in the entire lifetime of wind turbine. Simulation results of LPV control algorithm and PI control algorithm are obtained by the software Bladed under 12 and 16 m/s wind turbulence, respectively. In time domain, the generator speed and torque are varying due to the wind turbulence. The amplitude of fluctuations under PI controller is bigger than that under LPV controller. However, the differences are not significant. To illustrate the characteristics of wind turbulence affecting wind turbine performance, the simulation results are also analyzed in frequency domain. Through spectrograms, it is observed that the peaks are concentrated on multiple rotational frequencies. The primary components are multiple 3P frequencies. Therefore, decreasing the components of multiple 3P frequencies can mitigate load fluctuation. At rated wind speed, the tower shadow effect is dominant in the load fluctuations of wind turbine. However, at high wind speed, the fluctuation does not occurs only on multiple rotational frequencies, so the turbulence has bigger influence on wind turbine performance compared with the situation at rated wind speed. In the simulation, the wind speed is 16 m/s and the turbulence intensity is 0.16; compared with PI controller, the fluctuations of gearbox’s low speed shaft torque and power are reduced by 41.8% and 35.1% respectively on 3P frequency by LPV controller. Less load fluctuation on shaft torque leads to less fatigue damage on gearbox. Also smooth power output is friendly to the grid. Therefore, the proposed control algorithm can alleviate the influence of wind turbulence and enhance the performance of wind turbine, which can bring lower wind energy cost and longer wind turbine lifetime.
Keywords:wind turbines, algorithms; models; wind turbulence, linear parameter varying gain scheduling, load control
作者简介:邓英,女,教授,主要从事风电机组控制方面的研究。北京华北电力大学,102206。Email:dengying@ncepu.edu.cn
基金项目:国家高技术研究发展计划(863计划)(2011AA05A104)
收稿日期:2015-06-10
修订日期:2015-11-12
中图分类号:TM614
文献标志码:A
文章编号:1002-6819(2016)-03-0029-05
doi:10.11975/j.issn.1002-6819.2016.03.005
