基于点连式ATP的中低速磁悬浮信号解决方案
2016-03-01闫?
基于点连式ATP的中低速磁悬浮信号解决方案
闫
(中铁第一勘察设计院集团有限公司,陕西 西安 710043)
磁浮交通技术起源于德国,磁浮交通具有选线自由度大、噪声小、振动小、舒适和维护少等特点。中低速磁悬浮交通最高车速80~160 km/h,工程造价相对低廉,与地铁和轻轨等传统城市轨道交通互补,发展前景广阔。目前国内在建的同类工程有长沙中低速磁悬浮工程、北京磁浮示范线。本文研究的信号系统基于列车设计最高速度100 km/h,列车运行间隔3 min。目前,国内尚无针对中低速磁浮系统开发且经过验证的信号系统,在既有CBTC基础上做适应性开发的系统造价较高,能力优势无法体现,而点式ATP完全可以满足运行间隔3 min的要求。基于上述需求,在满足运营能力需求的基础上,为了降低工程造价,本文研究的信号系统采用点式ATP的方案,以固定闭塞方式追踪运行,配合点式应答器提供列控信息,为列车运行提供安全保证。考虑到线路道岔区、站台区、转换轨区域需要道岔防护、站台区安全防护(紧急停车)、车门和站台安全门联动等功能的要求,增强站区和岔区的安全防护能力,提高自动化程度,在上述区域采用局部连续车地通信。该系统区别传统点式通信ATP系统和连续式ATP系统,称之为“点连式ATP系统”。
1系统结构
本系统由地面设备和车载设备构成。系统总体方案如图1所示,它是由ATS(列车自动监控子系统)、CI(计算机联锁子系统)以及ATP(列车自动防护子系统)和局部覆盖的无线通信等设备,通过相应的网络及信息传输通道所构成一个完整的信号系统。这4个子系统被分到4个层级中,以便分级实现信号系统功能。

1)控制中心级。ATS系统的集中控制层设在运控中心内,在该处设立了中心级设备,安装了ATS数据库服务器、应用服务器、通信服务器、调度员工作站、列车时刻表编辑工作站、运行图显示工作站及设备维护管理工作站等,可实现全线列车运行图编辑、进路自动排列,列车运行、跟踪情况的监督及调整的集中控制功能;在车站一级,设备集中站安装了ATS车站服务器,每一个站安装了ATS工作站,可实现本站所辖区段列车运行的监视和进路排列。2)轨旁设备级。轨旁系统轨旁设备包括联锁和轨旁电子单元LEU以及相关部件等组成,它们共同执行联锁和轨旁ATP的所有功能。3)车地通信级。通信系统在轨旁和车载设备之间提供点连式或点式的通信,含地面无线设备、地面固定和可变应答器等设备。4)车载设备级。列车上安装的车载ATP设备,及车载点连式或点式通信设备。
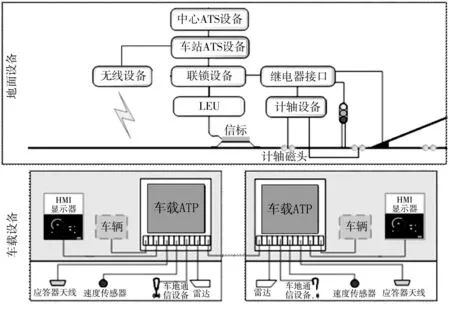
图1 系统构成示意图Fig.1 Schematic diagram of the system
从图1可以看出,本系统以传统点式ATP系统作为基础,再增加局部无线通信覆盖,构成总体结构。下面对本系统的特点进行分析。
2系统特点分析
2.1与轮轨系统的区别
对于信号系统,中低速磁浮与传统城市轨道交通轮轨系统主要区别包括:1)非轮轨驱动,传统信号在车轴上安装转速计测速的方式不再适用。2)由于无轮轨,无法利用传统计轴设备或轨道电路进行轨道区段空闲检查。
2.2与传统点式ATP系统的区别
传统点式ATP系统未设无线车地通信,而本系统在道岔区、站台区和转换轨区域采用局部连续车地通信。
2.3与高速磁悬浮系统的区别
1)根据运行速度,时速在400 km以上为高速磁浮列车,主要用于城市之间远距离的交通。中低速磁浮列车时速一般在100 km左右,主要用于城市内部交通。两者的悬浮原理相同,都是吸引式悬浮,但其导向系统、轨道结构、牵引系统和供电方式却不相同。
2)德国TR高速磁悬浮运行控制系统,是列车、轨道、控制中心、牵引、供电和信号一体化的控制系统,信号非独立系统,信号闭塞分区与供电分区保持一致。列车定位通过对安装在道床上的直线电机长定子上矩形开口槽进行检测实现,通过固定在轨道上编码标志板实现校准,每200 m设一处编码标志板。列车通过车地无线向控制中心报告列车位置和速度,控制中心根据列车位置进行分区控制,包括分区供电和分区闭塞。
3)日本ML高速磁悬浮信号系统相对独立,类似传统铁路信号系统。地面立交叉环线检测列车位置,每0.3 m交叉一次,定位精度0.1 m。利用感应环线作为车地通信设备。
4)德国TR高速磁悬浮系统作为一体化控制系统,与国内现行的专业分工完全不同,很难适应国内的建设模式。而日本ML高速磁悬浮信号系统采用交叉环线,施工难度大、造价高,也不适合作为中低速磁悬浮信号系统。
3系统关键技术分析
本系统与高速磁悬浮系统的关联性较小,关键技术需解决与传统轮轨系统的差异问题,及与传统点式ATP系统的差异问题,从以下4个方案展开分析:列车测速测距方案、列车定位方案、轨道占用检查方案和无线通信覆盖方案。
3.1列车测速测距方案
中低速磁悬浮采用的测速-测距方法包括:1)交叉感应环线测速方式;2)计数轨枕测速方式;3)多普勒雷达测速方式。交叉感应环线是在道床上铺设交叉感应环线,环线约0.3 m交叉一次,交叉环线中加载一定频率的交流信号,使车载感应线圈产生感应电流,列车通过交叉点时,感应电流相位发生变化,经采样处理后形成位置脉冲信号,车载设备据此计算列车走行距离和运行速度(原理见图2)。通过配置一定间距的多个感应线圈组,可提高测速精度,判断列车运行方向。此交叉感应环线通常只用于测速和定位,而不用于车地通信。
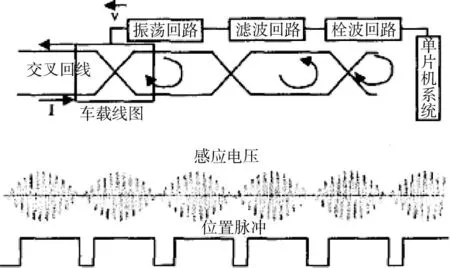
图2 交叉感应环线测速定位原理Fig.2 Cross-induction loop speed positioning principle
计数轨枕式测速是利用磁悬浮线路上采用钢枕特性,在列车底部根据精度要求等距离安装一定数量的电涡流感应式传感器,在传感器经过钢枕上方时,感应传感器中涡流变化,经处理后输出变化的脉冲序列,脉冲间隔与车速相关,车速越高,脉冲间隔越小,车速越低,脉冲间隔越大,车载设备据此计算列车速度和走行距离(原理见图3)。该方式不要求等间距铺设轨枕,可降低施工难度。

图3 计数轨枕式测速和定位原理Fig.3 Count sleeper speed and positioning theory
轮轨系统中多数情况为信号和车辆分别设置转速计,而由于磁悬浮测速系统的特殊性,国内中低速磁悬浮系统都采用车辆和信号共享车载感应式传感器输出方案,传感器由车辆配置,信号车载系统接收传感器输出脉冲信号,自行计算列车速度和相对位置。除了上述两种主要方案之外,还可通过车载多普勒雷达作为辅助测速校核手段,但雷达容易受天气和列车运行速度影响,如大雨或雾霾天以及车速较低时会导致测速不准,因此多数不作为主要测速方式独立使用。交叉感应环线方式施工和维护要求高,而计数轨枕方式相对简单,同时测速精度也满足要求,且在国内株机厂、唐客厂两条试验线均已验证,技术更成熟,故本系统采用计数轨枕测速-测距方式。同时为了提高系统可靠性,再增加多普勒雷达作为辅助设备,两者测速数据相校核再输出结果。即本系统列车测速测距采用计数轨枕+多普勒雷达辅助的方案。
3.2列车定位方案
列车定位以绝对位置为基点,再累加走行距离从而形成列车的实时位置(线路里程)。绝对定位方式包括:应答器和脉宽编码标志板。应答器与普通轨道交通中的应答器一致,分为欧标应答器和美标应答器。应答器安装在走行轨之间,列车经过应答器时接收到包含有线路里程信息的报文,从而可确定列车的绝对位置。每经过一次应答器,即可消除一次累积的测距误差,因此应答器设置越密,定位精度就越高。脉宽编码标志板方式通过在标志板上开槽的槽距不同来进行编码,当列车通过编码板时,编码板从车载阅读器的U型结构中间通过,阅读器产生不同时隙的脉冲,通过事先确定编解码原则,可计算出标志板的地址码,地址码对应标志板的绝对位置(如图4和5所示)。上海高速磁悬浮即采用此种绝对位置定位技术。
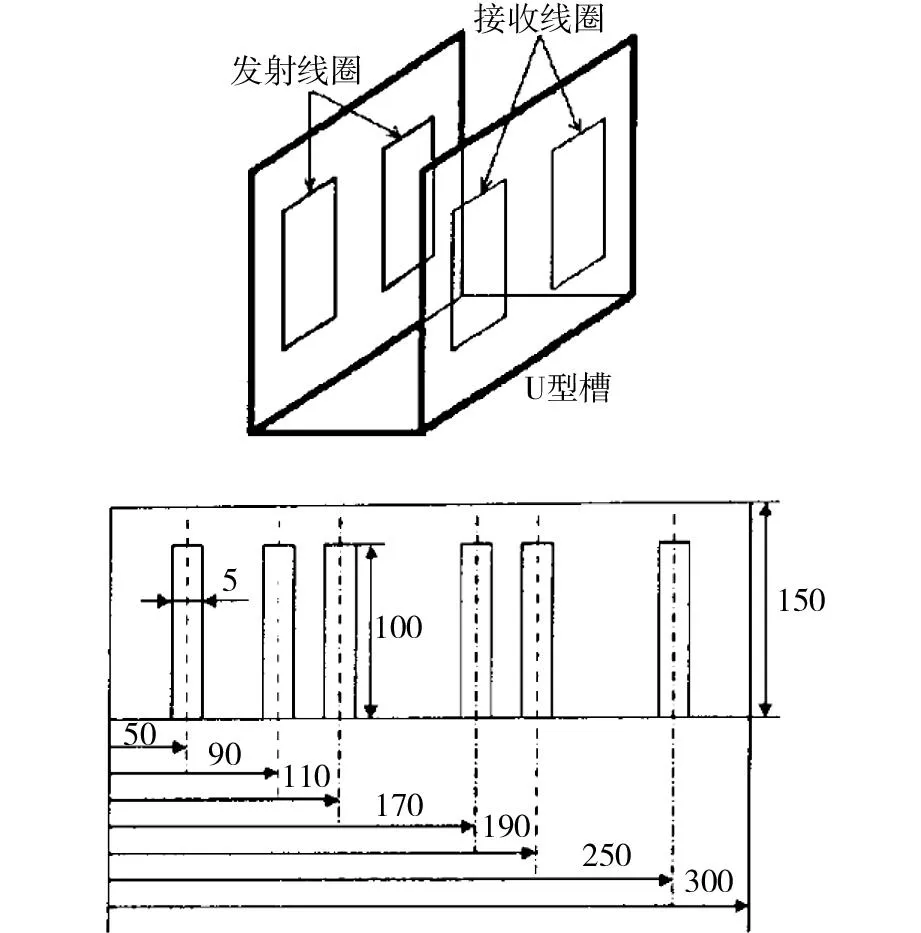
图4 车载阅读器和脉宽编码标志板示意图Fig.4 Onboard reader and pulse encoder sign board schematic
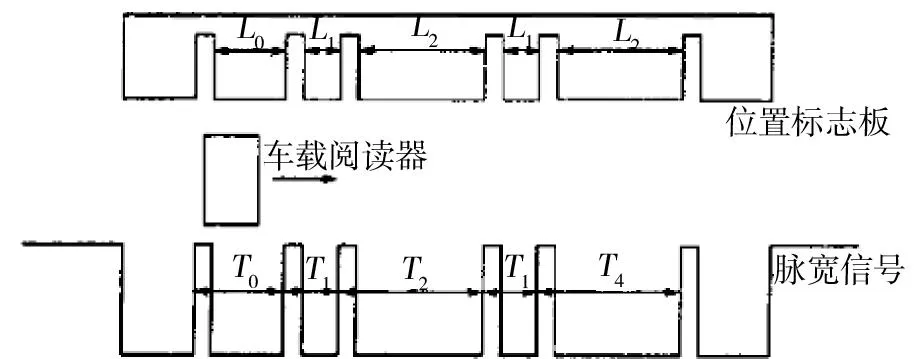
图5 读码原理图Fig.5 Code reading schematics
国内,应答器无论在高铁还是城市轨道交通中都得到了广泛的应用,技术成熟,积累了大量的应用经验。而脉宽编码标志板方式在国内应用较少,技术没有得到充分的验证,并且本系统的现场应用条件与上海高速磁悬浮差异较大,固不采用脉宽编码标志板方式作为定位方案。采用计数轨枕测距方式进行实时定位,车辆和信号可共享车载传感器输出,车载信号接收传感器脉冲信号,自行计算列车速度和相对位置,采用应答器实现绝对定位,两者结合定位精度可达0.1~0.3 m。故本系统采用“应答器+计数轨枕”定位方案。
3.3轨道占用检查方案
信号系统需要检查轨道区段的占用或空闲情况。因为磁浮列车没有轮轨,无法采用传统的轨道电路或计轴方式进行检查,可考虑模拟计轴和感应环线2种替代方式。
计轴方式是城市轨道交通信号系统最主要的轨道占用检测手段。在中低速磁悬浮中虽然没有轮轨,但可借鉴计轴传感器原理,通过在列车底部加装模拟车轮的感应板方式,模拟对磁悬浮列车的“计轴”功能,从而实现轨道区段占用检查。感应环线方式更加类似传统的轨道电路,区段长度范围内均铺设环线,列车上车头、车尾分别配置发送天线,列车进入环线时发送“checkin”信号,列车离开环线时发送“checkout”信号,地面设备根据接收到信号的次序,通过逻辑判断,驱动轨道继电器的吸起和落下,从而判断区段列车占用情况。地面环线自身也会发送“照查”信号,用于环线完好状态检查(原理见图6)。
计轴检测技术成熟、安全、可靠,性价比高,并且在国内两条中低速磁悬浮试验线中经过了充分的验证。感应环线可以实现测速、定位和占用检查3个功能,但是造价太高,实施难度大,维护不方便,不适合中低速磁悬浮信号系统。故本系统列车占用检查采用模拟计轴方案。

图6 感应环线列车位置检测示意图Fig.6 Circle line train position detection sensor schematic
3.4无线通信覆盖方案
本系统在传统点式系统的基础上,在特定区域(站台、道岔防护区域)增加车-地无线双向通信设备,列车在进入车-地无线双向通信覆盖区域后,车载设备主动发起与地面设备建立连接,成功连接后地面设备通过无线设备实时向车载设备发送站台门、紧急停车按钮、信号机和道岔的状态信息,车载设备根据地面设备发送的状态信息进行安全防护。例如防护列车进入特定区域站台门意外打开、紧急停车按钮按下、道岔失表失等意外情况。当上述意外情况发生后,车载ATP设备根据特定防护区和列车实际位置计算保护速度,若能保证在特定防护区前停车,通过降低保护速度曲线和推荐速度曲线的形式,引导司机正常停车,确保停在防护区之前。如司机不按照曲线减速,将触发紧急制动,确保列车停在防护区外。若列车已进入或非常接近防护区域,车载ATP 将防护列车立即紧急制动促使列车停车。
4结论
1)中低速磁悬浮列车是一种新型的交通运输工具。与传统的轮轨列车相比,磁悬浮列车在工作原理、轨道结构、驱动方式、调度运行等方面有很大的不同,因此对控制磁悬浮列车运行的信号系统也有着不同的要求。
2)本系统技术方案结合实际情况,对列车测速及定位、轨道占用检查、无线通信覆盖等关键信号技术进行了分析研究,给出了一套完整的适合中低速磁悬浮交通的信号系统解决方案,即“点连式ATP系统”。
3)随着国内在建同类工程,如长沙中低速磁浮工程、北京磁浮示范线的建成与运营,中低速磁悬浮信号系统将积累更多的实际运营经验,经过现场验证,形成一套独立的、系统的技术体系。因此,中低速磁悬浮信号系统的方案有待进一步的研究与优化。
参考文献:
[1] Q/CY BGM J001—2008,中低速磁浮交通设计规范[S].
Q/CY BGM J001—2008, Design of medium and low speed maglev transit[S].
[2] 吴祥明.磁浮列车[M].上海:上海科学技术出版社,2003.
WU Xiangming. Maglev train[M]. Shanghai: Shanghai Science and Technology Press,2003.
[3] 张利芝,唐骏同,陈展.CTCS2-200C型车载列车控制系统[J].机车电传动,2008(1):11-14.
ZHANG Lizhi,TANG Juntong, CHEN Zhan. CTCS2-200C on-board train control system[J].Electric Drive For Locomotives, 2008(1):11-14.
[4] 唐锐,吴俊泉.中低速磁浮列车在我国城轨交通中的应用前景[J].都市快轨交通,2006(2):12-16.
TANG Rui,WU Junquan. Application prospects of medium and low speed maglev vehicle in urban rail transit of China[J].Urban Rapid Rail Transit, 2006(2):12-16.
[5] 李文波.中低速磁悬浮列车信号系统[J].机车电传动,2011(1):43-46.
LI Wenbo. Signaling system in middle-low-speed maglev train[J].Electric Drive For Locomotives,2011(1): 43-46.
[6] 王洪波.磁悬浮列车速度控制与自动驾驶系统研究[D].长沙:国防科学技术大学,2002.
WANG Hongbo. The research of maglev train speed control and autopilot system[D].Changsha:National University of Defense Technology, 2002.
[7] 李壮.基于新型感应环线的磁浮列车通信和定位测速系统设计与实现[D].长沙:国防科学技术大学,2006.
LI Zhuang. Based on the new maglev train communication and positioning of inductive loop speed measuring system design and implementation[D].Changsha:National University of Defense Technology, 2006.
[8] 许义景,王连春.基于FTA磁悬浮列车牵引系统可靠性分析[J].机车电传动,2009(5):23-26.
XU Yijing, WANG Lianchun. Analysis of the reliabilities of traction system in maglev train with FTA method [J].Electric Drive For Locomotives,2009(5):23-26.
[9] 陈贵荣,龙志强.日本低速磁悬浮列车发展[J].国外铁道车辆,2008,45(1):1-3.
CHEN Guirong, LONG Zhiqiang. Development of low speed maglev train in Japan[J].Foreign Rolling Stock,2008,45(1):1-3.
[10] 同济大学.上海城轨磁浮交通方案设想及其关键技术研究[R].上海:同济大学,2005.
Tongji University. The research of Shanghai maglev transportation urban rail solution idea and key technology[R]. Shanghai:Tongji University,2005.
[11] 张佩竹.中低速磁悬浮技术特征及工程化研发[J].铁道标准设计,2006(增刊):254-258.
ZHANG Peizhu. Technological characteristics of magnetism with medium-low speed and development of engineering process[J].Railway Standard Design, 2006(Suppl):254-258.
[12] 张佩竹,张兴昭,田连生,等.中低速磁浮列车唐山试验线方案设计[Z].天津:铁道第三勘察设计院集团有限公司,2006.
ZHANG Peizhu, ZHANG Xingzhao, TIAN Liansheng, et al. Medium-low-speed maglev test line in Tangshan design [Z].Tianjin:The Third Railway Survey and Design Institute Group Corporation,2006.
(编辑蒋学东)
摘要:中低速磁悬浮作为一种新兴的交通工具,以其相对传统轨道交通的优势,发展前景广阔。本文基于设计时速100 km/h,运行间隔3分钟的中低速磁浮工程模型,信号系统采用“点连式ATP系统”。首先对中低速磁浮“点连式ATP系统”展开分析,研究本系统与传统轮轨系统及高速磁浮系统的差异,提出本系统的关键性技术是列车测速测距、列车定位、轨道占用检查及无线通信覆盖。前三项关键技术主要解决与传统轮轨系统的差异问题,无线通信覆盖方案解决与传统点式ATP系统的差异问题,从而给出一套完整的适合中低速磁悬浮的信号系统解决方案。
关键词:中低速磁悬浮;信号;测速;定位;轨道占用;覆盖
The solution of intermediate-low-speed maglev trainsignaling system based on the point-continuous ATPYAN Yan
(China Railway First Survey & Design Institute Group Co.Ltd., Xi’an 710043, China)
Abstract:The newly rising means of transportation, intermediate-low-speed maglev train, has a quite broad prospect comparing to the traditional ones. Based on analysis of the point-continuous signaling system model with a 100 km/h design speed and 3-minute tracking interval, this paper firstly studies the point-continuous ATP system, offering a glimpse of the difference between this system and the traditional wheeltrack and the high-speed maglev trains. The conclusion is that the key technologies are the distance and speed measurement, train locating, track occupation detecting and wireless communication covering. The former three technologies are mainly the difference between this system and the traditional wheeltrack ones, leaving the difference between the ATP and the traditional ones to the wireless communication covering technology, and concludes with a possible technical solution for the signaling system of intermediate-low-speed maglev railway.
Key words:intermediate-low-speed maglev train; signaling; velocity measurement; to locate; track occupation; to cover
中图分类号:U283.5
文献标志码:A
文章编号:1672-7029(2016)01-0158-06
通讯作者:闫(1982-),男,陕西西安人,博士,从事铁路信号工程研究设计;E-mail:tsythcyy@126.com
收稿日期:*2015-06-17
