转子式陀螺仪特性实验设计
2016-02-23张延顺黄萍李明
张延顺 黄萍 李明


摘要:定轴性、进动性和陀螺力矩是转子式陀螺的三大特性,也是最能反映陀螺仪原理与内涵的特性。为增强学生的直观认识和教学效果,基于电动框架式陀螺仪教具,设计了陀螺仪特性的演示与量化计算实验。设计的实验不仅增强了学生对抽象知识的理解、认识,更能通过计算体会陀螺仪输入输出物理量间的量化关系。
关键词:陀螺仪;三特性;教具;实验设计
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2016)08-0259-02
一、引言
陀螺仪是一种角速度传感器,其在惯性导航、载体稳定控制和力学参数测量领域有成功应用和很好的应用前景[1-3]。陀螺仪测量的是载体相对惯性空间的角速度,而我们日常生活中感受到的是相对地理坐标系的角速度。这使学生在学习陀螺仪原理时不易正确理解,这种现象在框架式陀螺仪教学中尤为突出。框架式二自由度陀螺仪是一种典型的转子陀螺,它具有定轴性、进动性和陀螺力矩效应三特性,但其结构与模型复杂[4],使定轴性、进动性和陀螺力矩效应这部分的教学内容抽象,不易理解。
实验教学是对理论教学的一个有效补充和提高[5]。陀螺仪的原理复杂、结构复杂,因此利用真实陀螺仪进行原理性实验的难度很大,且效果不好。而利用陀螺仪教具进行原理性演示和量化计算实验是切实可行,且成本低、效果好的一种方案。
目前,陀螺仪原理相关课程的任课教师多是采用一些教具进行陀螺特性演示实验,这有助于学生对抽象概念的理解与认识,但不能使学生通过理论和实验数据分析感受到陀螺特性公式的含义及输入、输出间的量化关系。本文基于作者前期研制的电动框架式陀螺仪教具,在“惯性器件原理”、“惯性导航技术综合实验”等课程教学需要下,进行了陀螺仪三特性的演示与量化计算实验设计。
二、框架式双自由度陀螺结构与原理
电动式框架式双自由度陀螺结构组成如图1所示。
图1中1是底座,2是框架,3是内框架,4是陀螺仪转子,5是驱动转子的电机,6是导电滑环,7是框架间角度传感器。
当电机驱动转子以很大角速度旋转时,陀螺仪转子具有较大的角速度,此时转子运动规律符合角动量定理,即陀螺仪转子角动量的变化与转子所受外力矩成正比。设外力矩为 ,外转子角动量为 ,则有
= ?摇 (1)
由式(1)可知:①当 =0时,转子角动量变化率d =0,陀螺仪转子角动量的大小和方向都不发生变化,即陀螺仪转子表现为定轴性;②当 ≠0时,在外力矩 作用下,角动量 在惯性空间中将出现变化,并产生进动角速度ω:ω= / (2);③当 ≠0时,陀螺转子受外力矩,但转子运动受阻,则转子会对给它施加力矩的物体产生反作用力矩,即陀螺力矩。
= ×ω (3)
三、陀螺特性实验设计
基于上节介绍的陀螺仪三特性和电动框架式陀螺仪教具,本文分别进行相应陀螺特性的演示和量化计算实验设计。
1.定轴性实验。定轴性实验相对简单,其实验过程是:①利用图1所示设备,开启直流电源,给陀螺仪转子电机通过,电机通电后带动陀螺仪转子高速旋转;②由于高速旋转产生的较大角动量,使陀螺转子轴的指向不变;③由此体会陀螺仪定轴性特性。
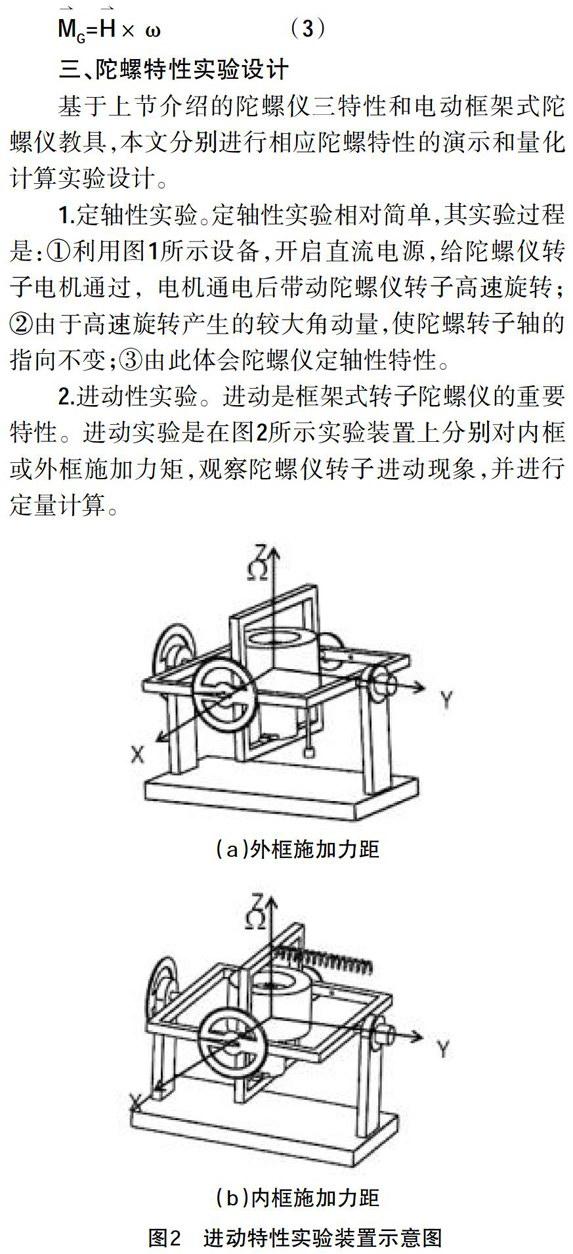
2.进动性实验。进动是框架式转子陀螺仪的重要特性。进动实验是在图2所示实验装置上分别对内框或外框施加力矩,观察陀螺仪转子进动现象,并进行定量计算。
图2中,(a)是对外框施加力矩示意图,施加力矩的方式可以是在外框边缘悬挂砝码或用弹簧称拉。(b)是对内框施加力矩,由于此时内框处于垂直位置,因此不适于在边缘悬挂砝码,可用弹簧称拉内框边缘。外力矩M可由砝码(弹簧称)和力与外框架(内框架)到转轴的距离计算,转子角动量H可由转子转动惯量和自转角速度计算,而进动角速度ω可通过角度传感器与进动时间的商来计算。
3.陀螺力矩实验。陀螺力矩是陀螺转子对使它产生强迫进动物体产生的反作用现象。应用框架式陀螺仪演示教具也能进行陀螺力矩演示与计算实验。主要思想是:将框架式陀螺仪演示教具的外框架与基座固连,并将教具基座连接到速率转台台面上,同时在内框架两端安装测力装置,如图3所示。
图3中1是陀螺仪教具,2是具有读数指示的弹簧称,3是速率转台台面。当转台带动框架式陀螺教具转动时,内框架在陀螺力矩作用下产生转动,使与内框连接的弹簧称(或测力装置)产生形变。通过弹簧称的读数和内框架结构尺寸即能计算出陀螺力矩。
四、结语
本文设计的框架式陀螺教具能进行陀螺三特性的定性演示与主要技术指标的定量计算,使学生能容易地理解陀螺仪三特性的抽象内涵,并对输入、输出物理量间的量化关系有深刻的认识。
参考文献:
[1]周徐昌,沈建森.惯性导航技术的发展及其应用[J].兵工自动化,2006,25(9):55-57.
[2]杨业飞,申文涛.惯性稳定平台中陀螺技术的发展现状和应用研究[J].飞航导弹,2011,(2):72-79.
[3]祝彬,郑娟.美国惯性导航与制导技术的新发展[J].中国航天,2008,(1):43-45.
[4]杨雪侠,刘娜.采用ANSYS的三浮陀螺仪框架的模态分析[J].现代制造工程,2009,(7):131-134.
[5]熊宏齐,戴玉蓉,郑家茂.实验教学改革与实验室建设规划的研究与实践[J].实验技术与管理,2008,25(10):1-5.
