三种坐标转换模型的比较
2016-02-21宋世泽郑勇王鼎蔚
宋世泽,郑勇,王鼎蔚
(1.信息工程大学 导航与空天目标工程学院,郑州 450001;2.北斗导航应用技术河南省协同创新中心,郑州 450001)
三种坐标转换模型的比较
宋世泽1,2,郑勇1,2,王鼎蔚1,2
(1.信息工程大学 导航与空天目标工程学院,郑州 450001;2.北斗导航应用技术河南省协同创新中心,郑州 450001)
本文分别用罗德里格参数、欧拉角、四元数构造旋转矩阵,进行坐标转换,然后做出比较。文章对三种模型的误差和效率都作出了实验分析,结果表明,在没有较好的初值情况下,罗德里格和四元数模型效率较高,但欧拉角和罗德里格模型的精度较高。因此,在没有初值的情况下,建议优先选取罗德里格模型。
罗德里格参数;欧拉角;四元数;坐标转换
0 引 言
在大地测量、摄影测量、和工程测量等应用中,经常用到坐标转换,这就需要解算坐标转换模型中的未知参数,其中关键的部分是解算构成旋转矩阵的未知参数。
有多种方法可以构造旋转矩阵,常用的三种方法为罗德里格参数、欧拉角和四元数法。这三种方法都有各自的特点。罗德里格参数法可以计算出较为精确的初始值,并且最后得到的误差方程形式较为简单,因此,比较适合用在相机检校上,文献[3-6]均利用罗德里格参数克服了相机检校中旋转矩阵的初始值不易获取的问题。在有些应用领域,由于旋转角直接给出,因此选用欧拉角构造旋转矩阵更为简单,例如在视频全站仪测量中,旋转角由全站仪精密测定,文献[7-12]对此做了详细阐述。四元数法具有直观的物理意义,它是将空间某个基准坐标系绕一个向量仅仅做一次旋转就可旋转到目标坐标系,与罗德里格矩阵一样,如果知道两个坐标系下的3个以上公共点,就可以求解较准确的旋转矩阵的初始值,文献[15-17]给出了详细阐述。
根据上述三种模型的各自的特点,应根据不同的工程应用背景,选择合适的模型。现有文献大多从大角度旋转角初始值不易获取,而选用罗德里格参数或者四元数法,但对于某些旋转角已知的情况,如视频全站仪,选用欧拉角模型是合适的。因此,单纯从初始值是否容易获取的角度比较三种模型是不合适的。
本文采用同一实测数据,使用一半数据作为实验数据进行坐标转换,另一半数据作为检核,对比参数解算的结果及各自的精度。
1 三维坐标转换模型
1.1 罗德里格参数
模型中共有7个参数:3个平移参数,3个旋转参数和1个尺度因子。其中,3个旋转参数可以构造旋转矩阵中的9个相关的元素。通过罗德里格参数构造反对称矩阵,从而转化成旋转矩阵[2]。
文献[3]给出了采用罗德里格矩阵进行坐标转换的方法:所有旋转矩阵R,均可由反对称矩阵Q和单位矩阵I表示,即:
R=(I+Q)(I-Q)-1,
(1)
其中
式中,(a,b,c)即为罗德里格参数,用以构造罗德里格矩阵。
Sh+S0=λ·R·SC,
(2)
令
(3)
式(1)变为
S=λ·R·SC.
Q矩阵有如下性质:
(I+Q)(I-Q)=(I-Q)(I+Q),
两边同乘以(I-Q)-1得
(I-Q)-1(I+Q)=(I+Q)(I-Q)-1=R,
(4)
代入式(3)得
(I-Q)S=λ·(I+Q)SC,
(5)
将上式展开后整理得
(6)
构建误差方程
(7)
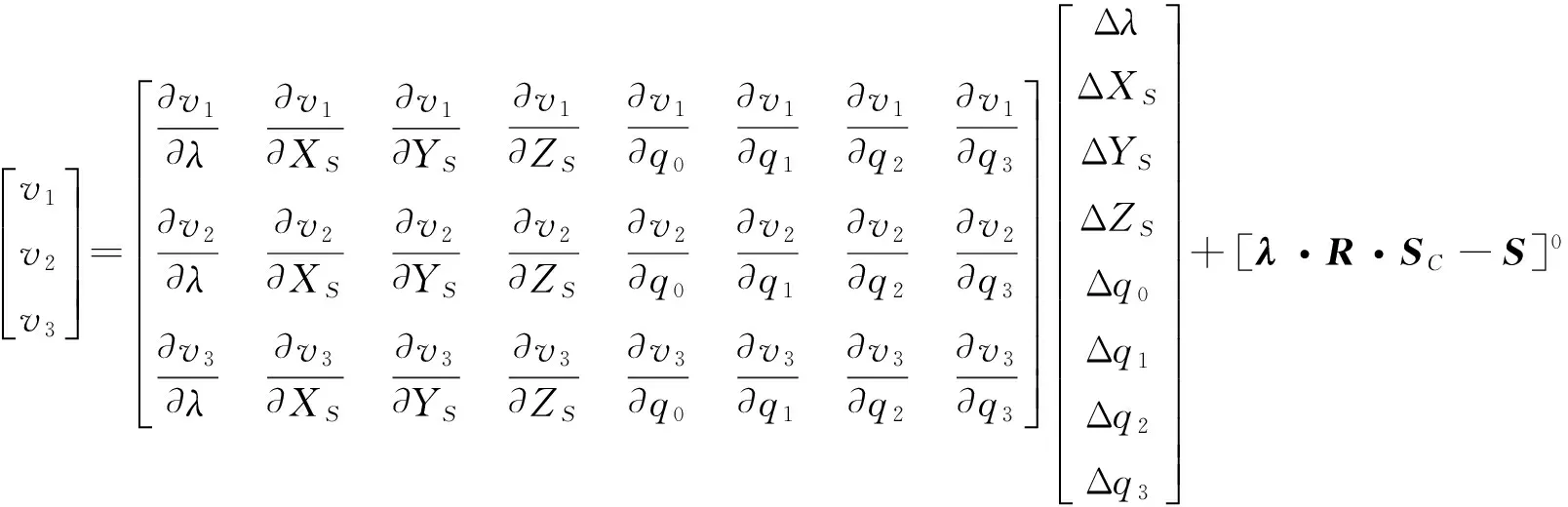
线性化得
(8)
将误差方程写成矩阵形式

(9)
未知参数的改正数为
(10)
单位权中误差
(11)
未知参数的精度估计公式为
(12)
1.2 欧拉角
模型中共有7个参数:3个平移参数,3个旋转参数和1个尺度因子。其中,3个旋转参数就是三个欧拉角,可以构造旋转矩阵中的9个方向余弦。
记
R中的各个元素是由三个欧拉角φ、ω、κ构成的方向余弦,本文选择的旋转轴顺序为[4]
1) 绕Y轴顺时针旋转(逆着Y轴正方向看)φ角;
2) 绕X轴顺时针旋转(逆着X轴正方向看)ω角;
3) 绕Z轴顺时针旋转(逆着Z轴正方向看)κ角;
R与三个欧拉角φ、ω、κ的关系式为
a1=cosφcosκ-sinφsinωsinκ,
a2=-cosφsinκ-sinφsinωcosκ,
a3=-sinφcosω,
b1=cosωsinκ,
b2=cosωcosκ,
b3=-sinω,
c1=sinφcosκ+cosφsinωsinκ,
c2=-sinφsinκ+cosφsinωcosκ,
c3=cosφcosω.
同式(2)、式(3),坐标转换公式为
S=λ·R·SC
将误差方程线性化后得
(13)
参数估计、精度估计以及单位权中误差公式为1.1节式(10)~式(12)。
1.3 四元数
模型中共有8个参数:3个平移参数,4个相关的旋转参数和1个尺度因子,其中,4个旋转参数就是四元数。
由四元数构成的旋转矩阵为[5-6]
将上式代入式(3)并构建误差方程
(14)
参数估计、精度估计以由式(10)、式(12),单位权中误差公式为
(15)
2 数据处理
2.1 参数解算
本文的数据由徕卡TS50i图像全站仪测得的370颗模拟星点,测量时间分别于2015年9月12日和2015年1月19日,采用双读数双照准,角度互差小于5″,距离互差小于0.1mm.采用其中185颗星点作为公共点进行坐标转换,另外185颗星点作检核。表1示出了三种模型的解算的参数结果,图1、图2、图3分别对应三种模型的三维坐标残差图。
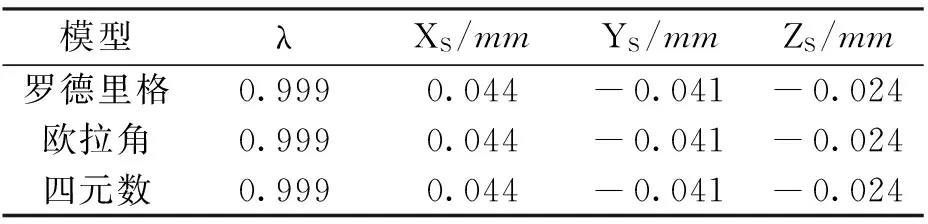
表1 三种模型得到的尺度因子和平移参数
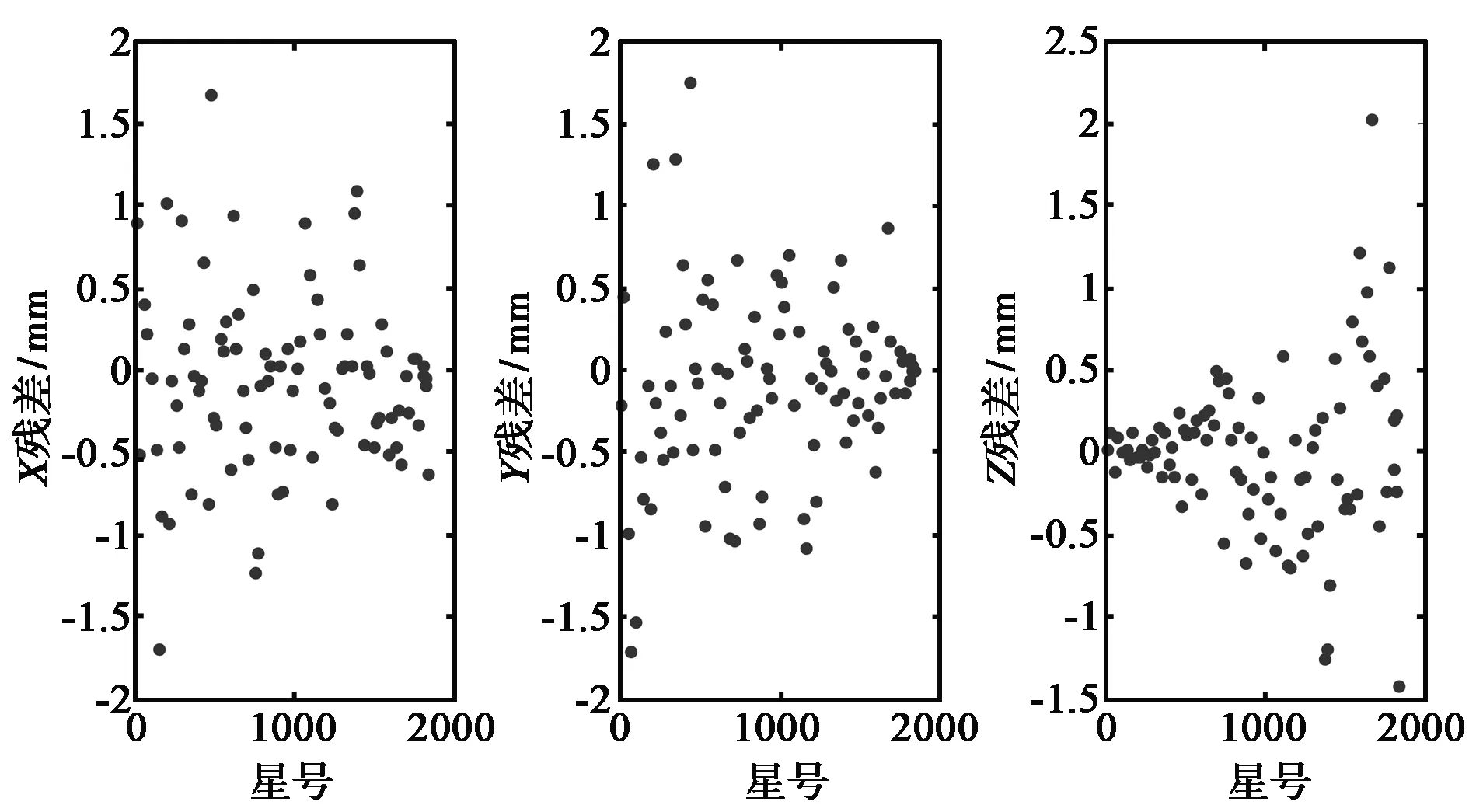
图1 罗德里格参数模型残差图
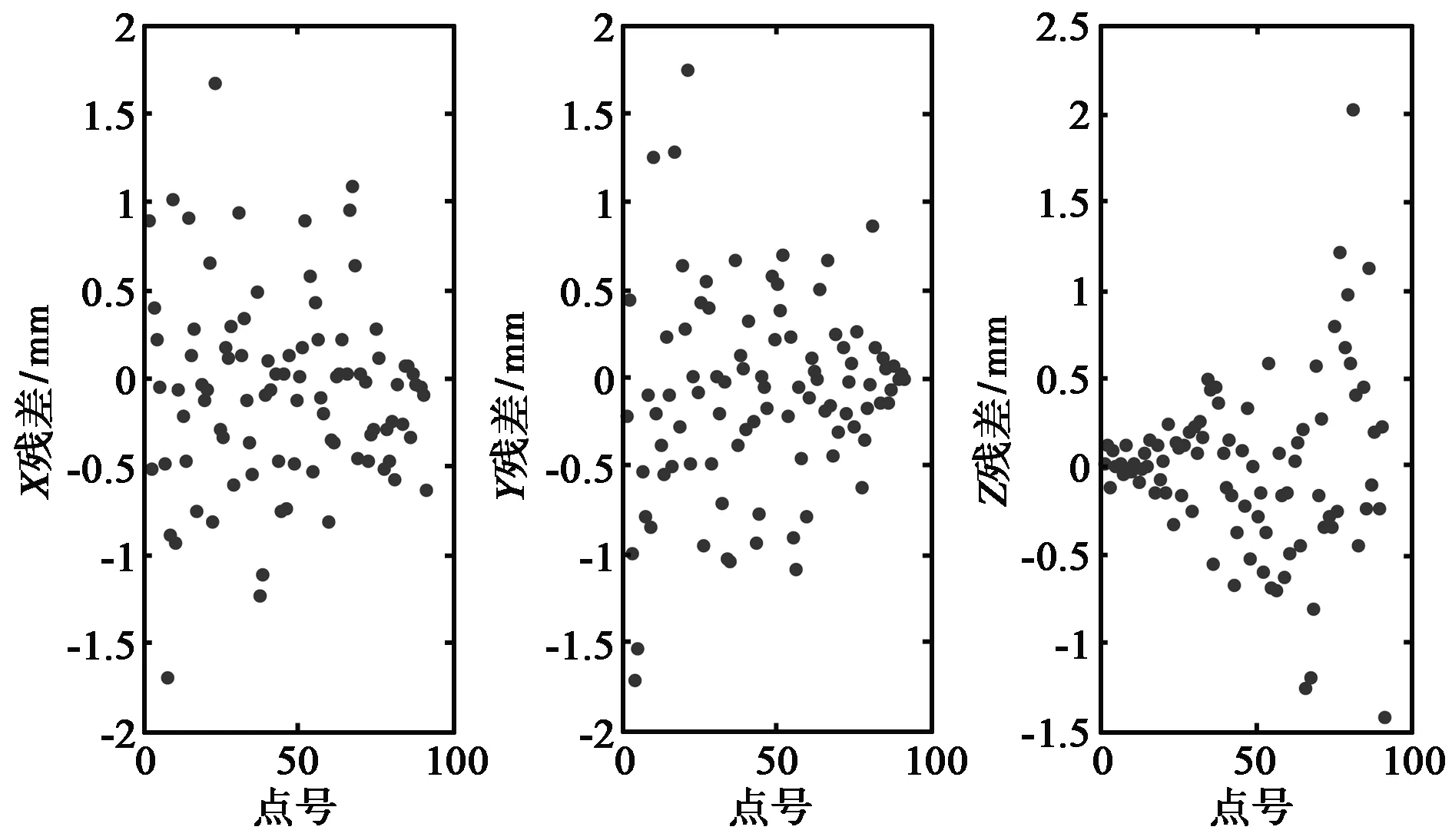
图2 欧拉角模型残差图
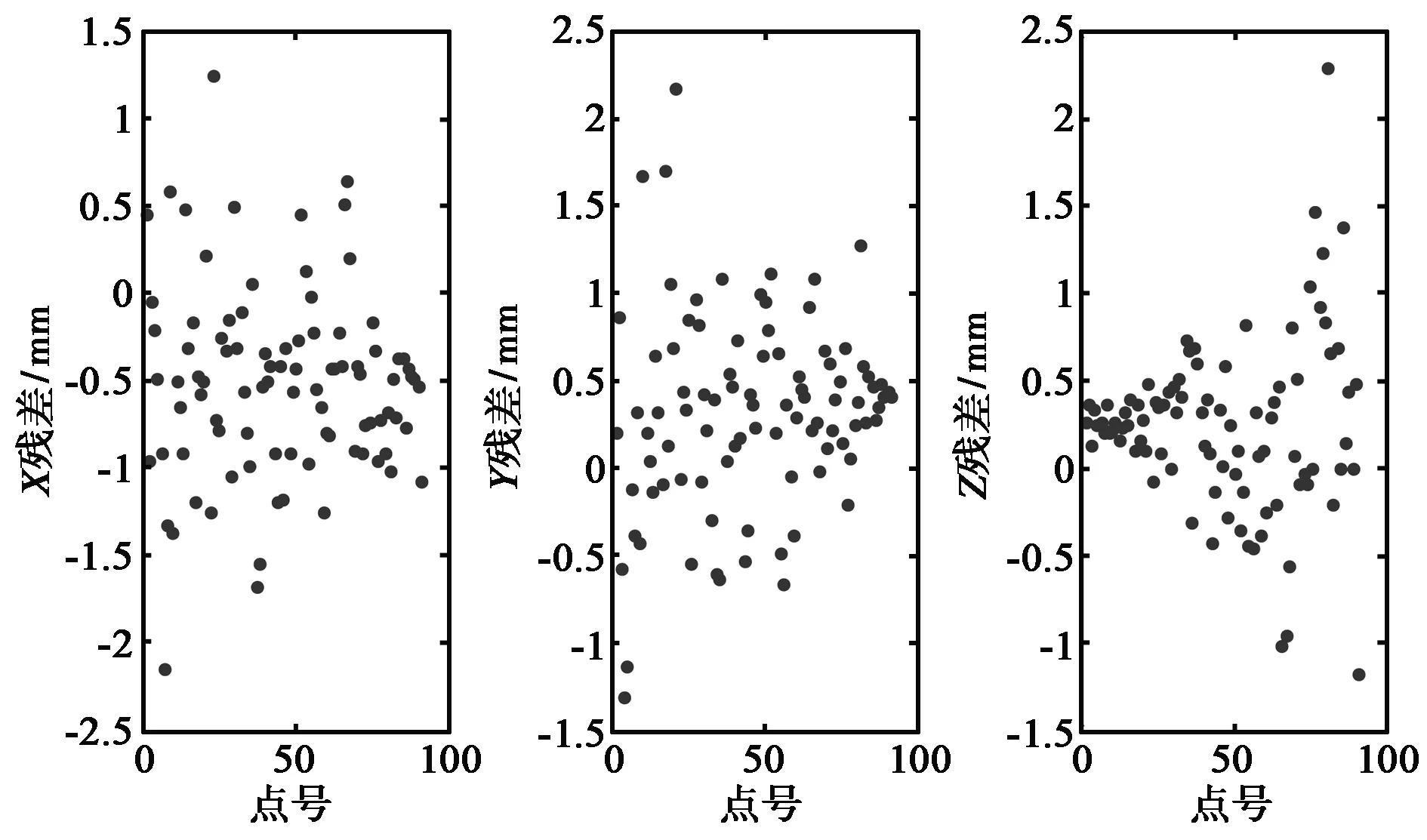
图3 四元数模型残差图
2.2 误差分析
本文主要讨论坐标转换模型带来的偶然误差和系统误差。
由于坐标转换模型使用的是相同的数据,因此残差的离散度可以说明模型带来的偶然误差的大小。
将残差带入下式:
(16)

得到三种模型的三维坐标均方根误差是一样的:
m(x)=0.54mm; m(y)=0. 57mm;
m(z)=0. 50mm.
这说明三种模型引起的偶然误差是一致的,这个结论和模型对应的残差图1~图3是一致的。
此外,模型还有可能引起系统误差,精度评价公式为
(17)
计算结果如表2所示
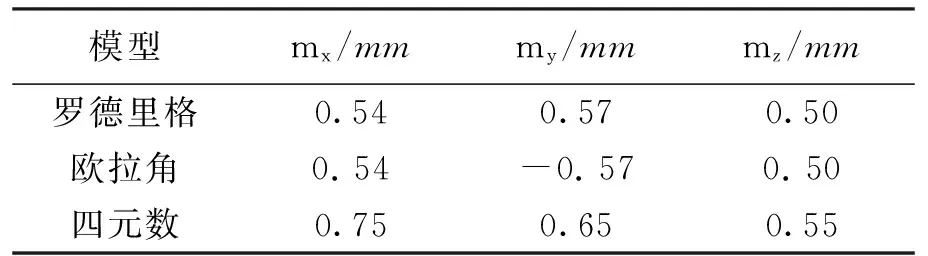
表2 三种模型对应的精度结果
从表2可以看出,罗德里格和欧拉角转换模型转换精度相等,说明这两种模型不会引起系统误差。很明显,四元数模型含有系统误差。
将图3和图1,图2做比较,可以看出四元数模型x、y、z方向上的残差有一个系统误差。这与表2得出的结论是一致的。
2.3 效率分析
三种模型都需要经过迭代才能计算出精确的结果,表3给出了三种模型各自的迭代次数。

表3 三种模型的迭代次数
表3说明,罗德里格模型效率较高,四元数次之,欧拉角最低。这主要是由初值的精确程度决定的,罗德里格和四元数模型都能得到较为精确的初始值。
3 结束语
综上分析,从解算精度分析,欧拉角和罗德里格模型精度较高,带来偶然误差和系统误差较小,而四元数模型带来系统误差较大,这主要是由于参数之间的相关性引起的; 从效率上分析,在初始值不能事先给出的情况下,由于罗德里格容易获得较为准确的初值,因此效率较高。
[1] 张卡,张道俊,盛业华,等.三维坐标转换的两种方法及其比较研究[J].数学的实践与认识,2008,38(23):121-128.
[2] 原玉磊,蒋理兴,刘灵杰.罗德里格矩阵在坐标系转换中的应用[J].测绘科学,2010(2):178-179,119.
[3] 詹银虎,郑勇,张超,等.鱼眼相机矢量观测检校模型及应用[J].测绘学报,2016,45(3):332-338.
[4] 刘松杲,金为铣.罗德里格矩阵在解析摄影测量坐标变换计算中的应用[J].武测资料,1982(1):43-51.
[5] 李奇峻,李含璞,雷蓉,等.罗德里格矩阵在资源三号全色影像姿态角常差检校中的应用[J].测绘科学技术学报,2015,32(1):56-60.
[6] 于志路,姚吉利,吕长广.罗德里格矩阵在空间后方交会直接解法中的应用[J].测绘工程,2005,14(2):50-52.
[7] 周虎.基于视觉的目标跟踪与空间坐标定位系统研究[D].天津:天津大学,2011.
[8] 范百兴.高性能全站仪的研究及其在动态测量中的应用[D].郑州:解放军信息工程大学,2004.
[9] 张海玲.基于TCA2003全站仪的自动变形监测系统的研制[D].青岛:山东科技大学,2005.
[10] 何峰.精密动态测量精度检测技术研究[D].郑州:解放军信息工程大学,2007.
[11] 张祖勋,詹总谦,郑顺义,等.摄影全站仪系统——数字摄影测量与全站仪的集成[J].测绘通报,2005(11):1-5.
[12] 张祖勋.论摄影测量与工程测量的结合——摄影全站仪+数码摄影机[J].地理空间信息,2004(6):1-4.
[13] 乔相伟,周卫东,吉宇人.用四元数状态切换无迹卡尔曼曼滤滤波器估计的飞行器姿态[J].控制理论与应用,2012,29(1):97-103.
[14] 陈北京,孙星明,王定成,赵晓平.基于彩色图像四元数表示的彩色人脸识别[J].自动化学报,2012,38(11):1815-1823.
[15] 张荣辉,贾宏光,陈涛,等.基于四元数法的捷联式惯性导航系统的姿态解算[J].光学精密工程,2008(10):1963-1970.
[16] 乔相伟.基于四元数非线性滤波的飞行器姿态确定算法研究[D].哈尔滨:哈尔滨工程大学,2011.
[17] 李奇峻,李含璞,雷蓉,等.罗德里格矩阵在资源三号全色影像姿态角常差检校中的应用[J].测绘科学技术学报,2015,32(1):56-60.
[18] 原玉磊.鱼眼相机恒星法检校技术研究[D],郑州:信息工程大学,2012.
[19] 王力,李豪,姜卫平.一种基于四元数的三维基准转换简便模型[J].大地测量与地球动力学,2015,35(2):243-247
[20] 陈廷楠,张登成.双欧法与四元数法的应用比较[J].飞行力学,1996,14(4):59-64.
The Comparison of Three Kinds of Coordinate Transformation Model
SONG Shize1,2,ZHENG Yong1,2,WANG Dingwei1,2
(1.InstituteofNavigationandAerospaceTarget,UniversityofInformationEngineering,Zhengzhou450001,China;2.BeidouNavigationTechnologyCollaborativeInnovationCenterofHenan,Zhengzhou450001,China)
This paper structures rotation matrix for coordinate transformation,respectively with rodrigo parameters, Euler angle, quaternion. And then make a comparison, the experimental results show that the precision of the three kinds of transformation model is consistent. Among them, the euler Angle model is simple to understand, but not simple to obtain relatively accurate initial value; because of more parameters, Quaternion model unfavorablely leads to convergence; Rodrigo parameter model can overcome the disadvantages of the two models above.
Rodrigo parameters; Euler angle; Quaternions; coordinate transformation
2016-09-10
10.13442/j.gnss.1008-9268.2016.06.022
P228.4
1008-9268(2016)06-0110-05
宋世泽(1988-),男,河南焦作人,硕士生,从事大地测量、天文测量等应用。
郑勇(1963-),男,福建长乐人,教授,博导,从事大地测量、天文测量等。
王鼎蔚(1993-),男,河南许昌人,硕士生,从事大地测量、天文测量等。
联系人:宋世泽 E-mail: 1598697583@qq.com
