GNSS干扰监测定位系统设计与实现
2016-02-21殷赞张发祥甄卫民袁亚平
殷赞,张发祥,甄卫民,袁亚平
(中国电波传播研究所,青岛 266107)
GNSS干扰监测定位系统设计与实现
殷赞,张发祥,甄卫民,袁亚平
(中国电波传播研究所,青岛 266107)
为了GNSS的干扰检测与减缓,需研制便于工程化应用的GNSS干扰监测定位系统。本文论述了一种相关干涉仪测向定位系统的设计与实现方法,详细论述了设计中采用的关键技术,系统关键指标测试方法及测试结果。经测试验证该系统具有优良的指标性能,并且由于硬件实现成本适宜,因而在卫星导航干扰检测与缓解领域具有很好的应用前景。
全球卫星导航系统;干扰检测和缓解;测向定位;相关干涉仪
0 引 言
随着全球卫星导航系统(GNSS)的发展,卫星导航应用在军、民等领域越来越广泛。但是,GNSS系统面临着有意和无意的各种干扰,这些干扰影响了导航系统地面段的测控、运控和用户的正常运行,对卫星导航的精度、可用性、连续性和完整性都造成了严重的威胁[1]。
为了保护GPS,美国总统于2007年8月20日签署通过了“定位、导航、授时干扰检测和缓解计划(IDM)。为了保护GNSS,联合国下属全球导航卫星系统国际委员会(ICG)将IDM作为重要议题,我国积极参与[2-3],中国电波传播研究所甄卫民担任IDM任务组联合主席。
为了GNSS的干扰检测与缓解,需研制便于工程化应用的GNSS干扰监测定位设备, 本文论述的GNSS 干扰监测定位系统采用基于频谱的干扰检测技术与基于比相的测向定位技术。
基于频谱监测的干扰检测技术是根据干扰信号在频域上呈现的特性计算干扰信号的功率和频率,以接收信号的统计特性和实际应用场合确定合适的干扰监测门限,当某谱线大于干扰检测门限时,则判定为干扰信号频谱。
基于比相的测向定位技术包括相位干涉仪和相关干涉仪测向,相关干涉仪测向不同于干涉仪传统解模糊方法[4],用相关来解决相位模糊问题,从而突破了传统干涉仪测向法天线最小孔径必须小于1/2波长的限制。相关技术和大孔径天线阵的引入,使相关干涉仪测向法在干涉仪的基础上拓展了频段范围,提高了测向精度、测向灵敏度和抗干扰能力[5],因此本文测向方法选取相关干涉仪测向。
1 系统原理和工程化实现分析
本系统测向采用相关干涉仪测向原理,该原理描述为:远场信号在入射到天线阵列时,由于天线阵列中天线元所处的位置不同,阵元间会有一定的距离差,这个阵元间的距离差就会产生不同的相位差。假设来波信号频率不变,入射天线阵列的方位不变,则来波在两个天线元间产生的相位差就不变。利用这个特性,首先收集相应频率点在360°方位上产生的相位差组合作为样本库,测向时收集到的相位差组合与样本库中的360°样本进行比对,相关性最好的那个方位就是来波方位。
相关干涉仪根据接收机通道数分为单通道、双通道和多通道。单通道体积功耗最小,但测向速度太慢,由于宽带移相器的引入使测向精度受到一定影响,多通道测向速度快,但通道数增多使体积功耗和成本增加,工程化应用中一般选取双通道系统。
相关干涉仪测向工作流程图如图1所示,天线阵接收无线电波信号,天线开关矩阵分时选取两阵元作为输出信号,双通道射频模块将两路射频信号下变频到中频信号,数据采集和数字正交下变频模块将两路中频信号变换为数字中频信号和数字基带IQ数据,监测测向模块完成干扰信号的监测和测向,干扰监测测向显控模块完成显控功能。以下对主要模块实现原理进行论述。
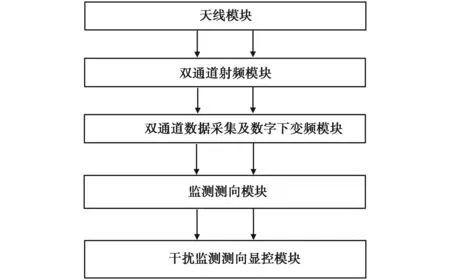
图1 相关干涉仪测向工作流程框图
1.1 天线模块
综合考虑天线尺寸、重量和测向精度等,天线模块选取九阵元圆形天线阵,如图2所示。信号到达i阵元相对于圆心之间的波程差:
di=Rcos(θi-θ).
(1)
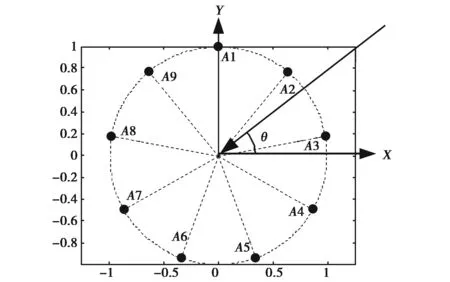
图2 天线模块示意图
则信号到达第i个阵元相对于圆心的时延:
τi=di/C=Rcos(θi-θ)/C.
(2)
天线阵列的导向矢量[6]为
A=[e-jw0τ1,e-jw0τ2,…e-jw0τ9],
(3)
其中:R为天线阵半径;ω0为信号角频率;θ为来波入射方向;θi代表第i个阵元与水平方向之间的夹角。天线输出信号矢量模型为
X(t)=AS(t)+N(t),
(4)
式中:A为天线阵导向矢量;S(t)为窄带远场空间信号;N(t)为噪声数据。
1.2 数据采集及数字下变频模块
如图3所示,数据采集及数字下变频采用共时钟的两个ADC对射频模块输出的中心频率为75 MHz,最大带宽是20 MHz的信号模拟中频信号进行数字化采样及下变频处理,由于数据具有很高的速率,只有通过抽取器使速率降低,并通过增益调整和补偿滤波器调整等信号调理后才便于后续信号处理。
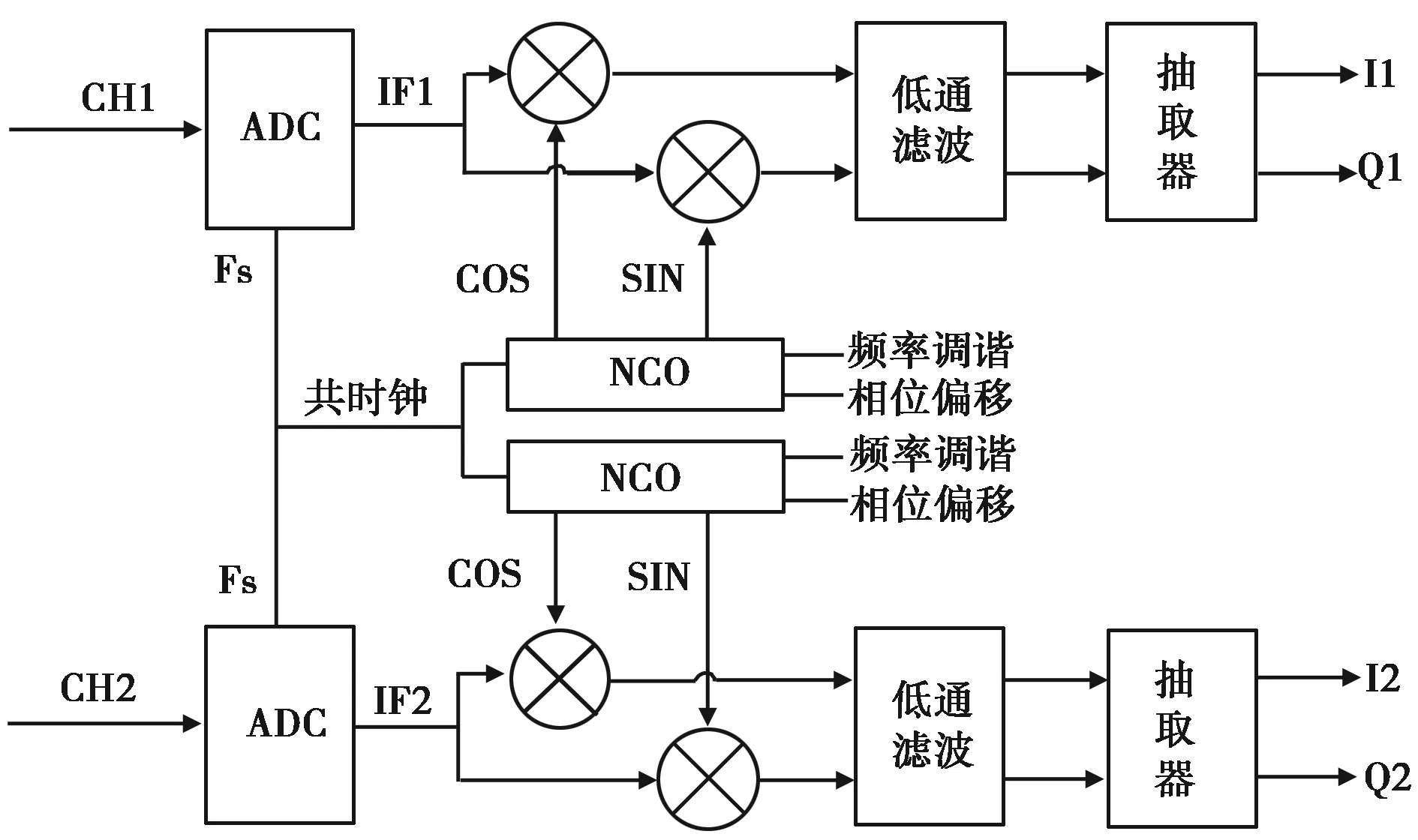
图3 数据采集及下变频模块原理框图
根据带通采样定理[7],采样频率选择为100 MSPS,数字正交下变频[7]是将数字化后的信号与NCO输出的正余弦信号进行混频后形成正交的IQ两路信号,设数字化后中频信号为
s(n)=Acos(2πf0nts+φ0).
(5)
离散本振信号为
siLO(n)=cos(2πf0nts).
(6)
sqLO(n)=sin(2πf0nts).
(7)
中频信号与本振信号作IQ正交处理并通过低通滤波器后,得到两路正交信号:
I(n)=0.5Acosφ0,
Q(n)=-0.5Asinφ0.
(8)
1.3 监测测向模块
如图4所示,监测测向模块包括频谱分析模块和测向模块,测向模块包括相位差计算、方向粗估计、二次插值和真北校准等。相位差计算模块通过计算两路IQ数据得到两阵元之间相位差;使用各基线对应的相位差数据与事先存储的样本相位差通过方向粗估计模块进行相似度计算,找出来波信号的入射方位角粗略值;二次插值模块对相关系数进行二次插值,得到较为精确的信号入射方位角;真北校准模块利用电子罗盘测得的磁北方向和磁偏角数据库对测得的方位角校正为真北角度。
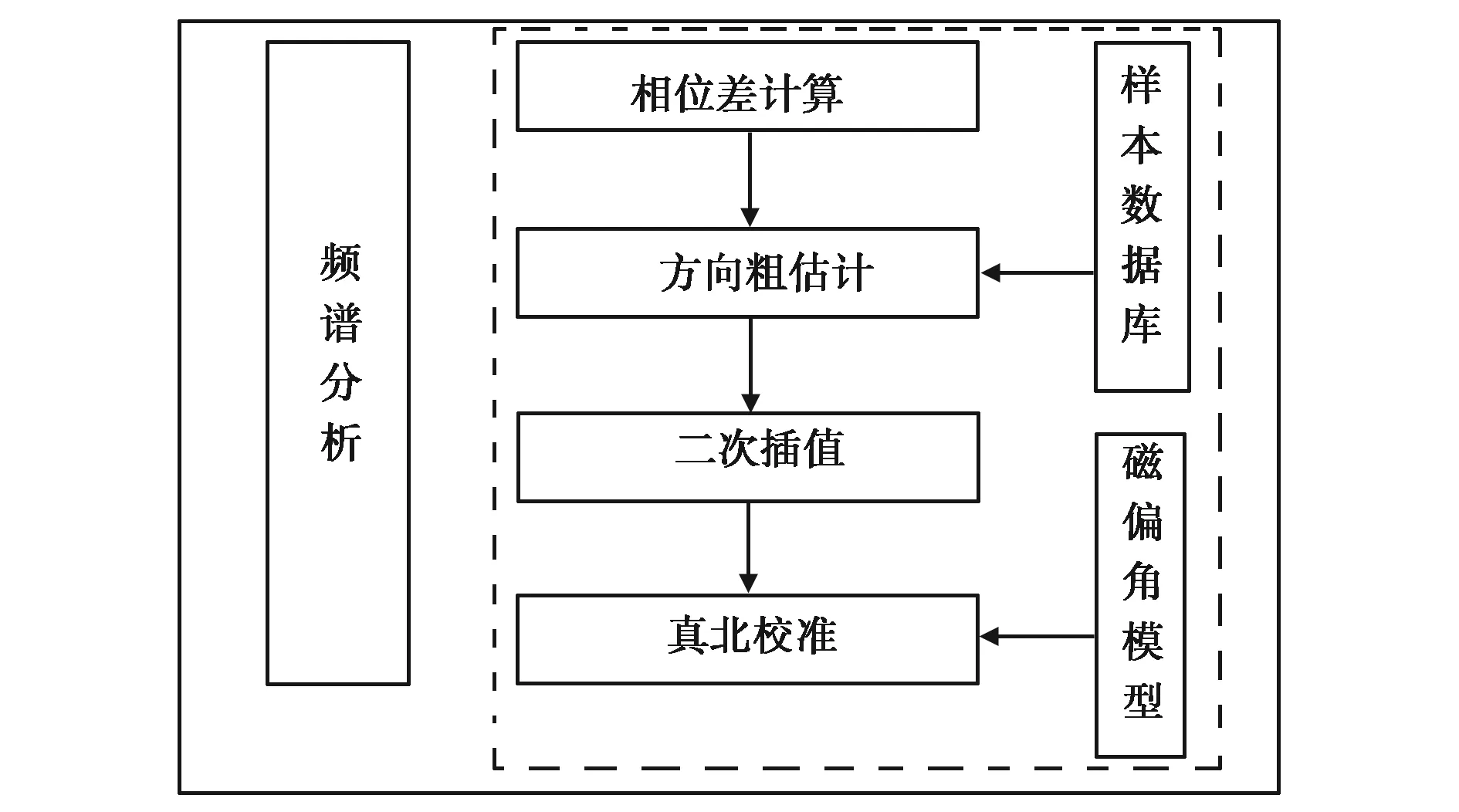
图4 监测测向模块原理框图
1.3.1 相位差计算
根据1.1节所述,圆阵天线阵元i相对于圆心的相位差为
Δφi=2π×di/λ=2πRcos(θi-θ)/λ.
(9)
求得天线端相位差Δφi便能求得来波信号方向角θ,通过中频输出端测得的两通道间相位差,不是天线阵元感应电动势的真实相位差φi,j,它们之间存在由两路接收通道的电子元器件参数公差和其他因素引起的未知公共相移φ0,故中频端测得的相位差称之为伪相位差
φpi,j=φi,j+φ0.
(10)
1) 接收机通道间相位差(伪相位差)
对于已经做完IQ 正交变换及抽取的零中频信号而言,求解中频输出端初相的方法很多,最基本的方法是利用IQ 正交求取相位,方法为
φ0=arctan[-Q(n)/I(n)].
(11)
但是对于低信噪比的情况下,该方法精度较差。由于FFT法能够有效抑制高斯白噪声,所以对于信噪比较低时,可以采用基于FFT法求取相位的方法。
对于输入信号s1(n),s2(n)分别进行FFT变换表示为
s2(k)=s2I(k)+j*s2Q(k).
(12)
求出各个通道信号的初相位以后,两个通道之间相位差可以表示为
(13)
式中,k0对应频谱能量最大谱线.
2)天线阵元感应电动势相位差
双通道相关干涉仪围绕如何从测得的伪相位差中消除φ0得到真实相位差,方法有两种,一种是增加校准信号源测出,但是增加了硬件成本。本文采用不增加硬件但是牺牲一组基线去得到真实相位差的折中方法,原理为
已测得伪相位差φpi,k和φpj,k,则两者相减可得真实相位差φi,j=φpi,k-φpj,k.
这样做还消除了天线与接收机之间线缆对测向样本数据库的影响,避免了更换线缆就要重新采样的弊端。
1.3.2 方向粗估计
在工业制造业中,自动化的程度越高,那么生产设计的智能化也会逐步增加,在现阶段机械设计制造环境中倡导自动化发展,那么智能化也必将成为重要发展趋势,在很多实践活动中就有所体现。譬如在机床设计上,尽管我国的机床设计总量很大,但是真正的高级机床大部分依赖进口,如果未来机械设计制造的自动化程度攀升,智能化程度也会增加,那么高级机床的设计也会得到发展。
如果对于某一实际目标信号,某一方位上测得的相位差矩阵为
N=[φ1,2,φ1,3,φ1,4,φ1,5,φ1,6,φ1,7,φ1,8,φ1,9].
(14)
方向粗估计方法一般采用相关系数法和余弦函数法[8]。
相关系数法将实际测得的相位差矩阵N与相位差样本M逐一进行相关处理,计算出72个相关系数,相关系数最大值对应的方位角即为来波方向。相关系数计算采用基于夹角余弦的计算方法,公式为
(15)
j=0,1,…,71,
使R取最大值的那一组相位样本测量结果所对应的方位值,就是目标信号方位值的估计值。
余弦函数法不直接使用实测相位差与样本相位差之间的差作相关处理,而是用差值的余弦作相关运算
(16)
当信噪比较低时,相关系数法存在相位跳变模糊问题,所以在工程化实现中本文采用余弦函数法。
1.3.3 二次插值
由于原始相位差样本所对应的方位角数目有限,因此如果目标的实际方位在有限个方位值的两个值之间时,则可用曲线拟合法进行插值运算,以求得准确的方位角。
图5示出曲线拟合法的原理,方位基准点θL,θM,θH是等间距的θM对应于相关函数的最大值RM,θL和θH是在θM两边最邻近的基准点,与它们相对应的相关函数值分别为RL,RH.只要RL,RM,RH不共线,则这三个点可以确定一个抛物线,这个抛物线对称于通过其峰值的垂线。
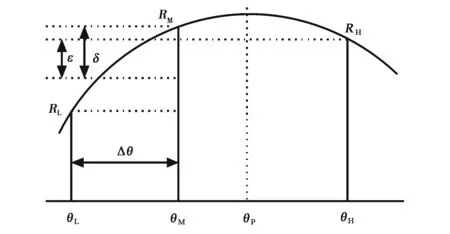
图5 曲线拟合原理图
由图5可以得到下列参量:
(17)
(18)
方位角的修正项为
(19)
抛物线的顶点所对应的方位角为
θP=θM+Δθ·QAZ,
(20)
式中: Δθ为方位基准点之间的间隔;θM为相关函数最大值RM对应的方位角。
显然,如果抛物线的顶点与基准点重合则基准点本身就是被测信号的方位角的真实值,若抛物线的顶点位于两个基准点之间,由上式确定的θP就是被测信号方位角。
1.3.4 真北校准
由于测向设备测出的方位角是相对值,为了在地图中直观的显示,需进行真北校准。
真北校准分为两步,第一步:根据电子罗盘测得的真北方向修正测向设备测出的方位角,第二步:由于磁北与真北之间存在一个夹角,此夹角随着时间,地理经纬度和高度变化,采用磁偏角模型进行修正。推荐使用美国国家海洋和大气管理局(NOAA)的世界磁偏角计算模型或其他经验模型。
2 干扰监测定位系统设计
该系统能实时检测GNSS导航频段,对干扰信号进行频谱分析和参数测量,可测量干扰源来波方向,根据测向结果对干扰源进行交汇定位。单台设备时,移动设备分时多点定位结果进行交叉定位;多台设备时,多台设备同时测向并实现交叉定位。
干扰监测定位系统包括天线、主机,显控终端(含软件)和数据通信终端等,如图6所示,监测测向天线完成接收空间电磁波信号,导航卫星天线和导航授时模块完成本地站点定位和授时功能;监测测向主机接收天线的信号,完成干扰信号的监测测向功能;监测定位软件实现对监测测向设备的通信与控制,并将监测测向定位结果显示在显控终端上;数据通信终端可将监测结果上传中心。
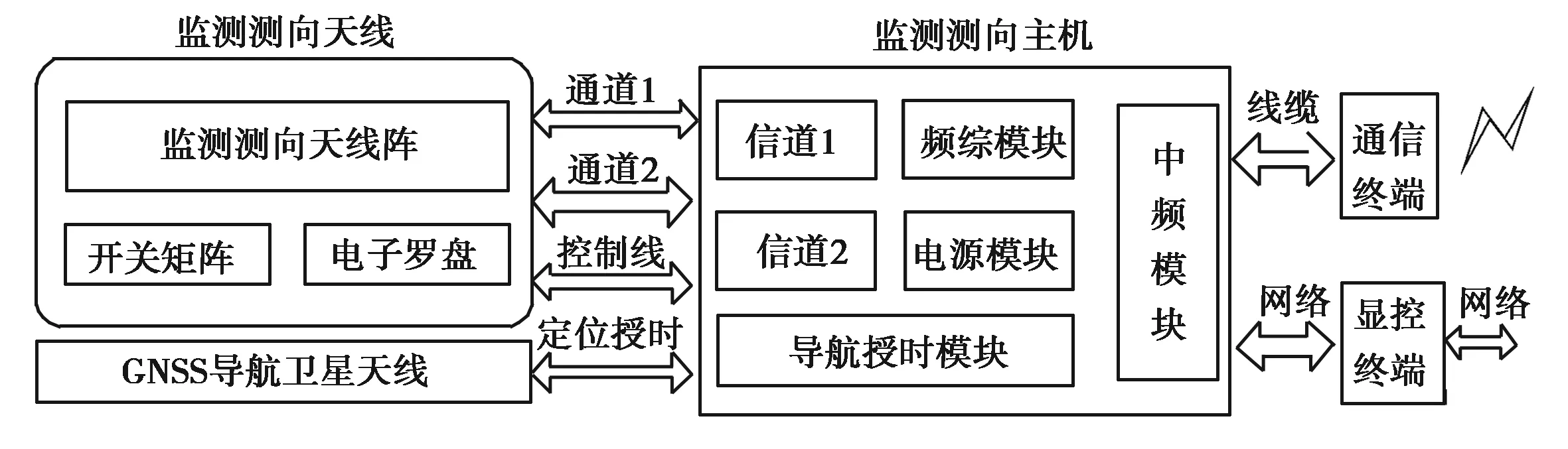
图6 干扰监测定位系统组成框图
2.1 监测测向天线
监测测向天线包括天线阵元、电子罗盘和射频开关,均安装于天线罩内,实现监测测向天线一体化设计。天线阵元接收空间中的电磁信号,电子罗盘提供磁北方向,开关矩阵选择两个天线阵元接到两路输出通道上。
天线阵采用9阵元按同心圆均匀布阵,封装于同一玻璃钢罩内,所有阵元均相同,采用印制板偶极子天线。
在测向模式下,可选择多个测向天线中的任意两个天线信号作为输出;在监测模式下,可将监测天线的信号作为输出,如图7所示。
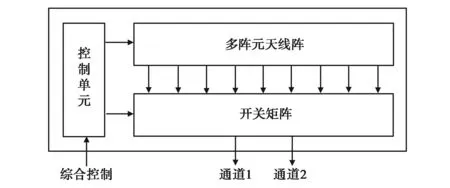
图7 天线阵组成框图
2.2 监测测向主机
主机采用双通道模式,由2个监测测向信道、频率综合器、中频处理模块、导航授时模块和电源模块等组成,如图8所示。
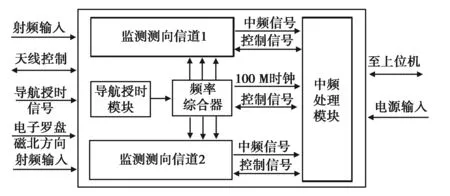
图8 监测测向主机组成框图
监测测向信道接收天线输出的两路导航频段无线电信号,以频率综合器产生的本振信号为基准,将感兴趣的信号变换到中频,在中频处理模块中完成中频信号的采样、提取基带IQ数据、频谱分析、相位差提取等工作。中频处理板通过网络与上位机应用软件实现数据交互、通过串口与导航授时模块之间实现数据交互,通过SPI口控制监测测向信道和频率综合器。
监测测向信道包含了从天线输入至中频输出的信号处理部分电路,模块采用二级变频模式,将射频信号下变频为中心频率为75MHz的中频信号,带宽为宽带20MHz和窄带500kHz两种可选。
中频处理单元主要由滤波、A/D、DSP电路、FPGA电路和时钟电路等部分组成,根据需要,时钟可采用外部参考时钟输入或本地晶振产生两种方式,如图9所示。
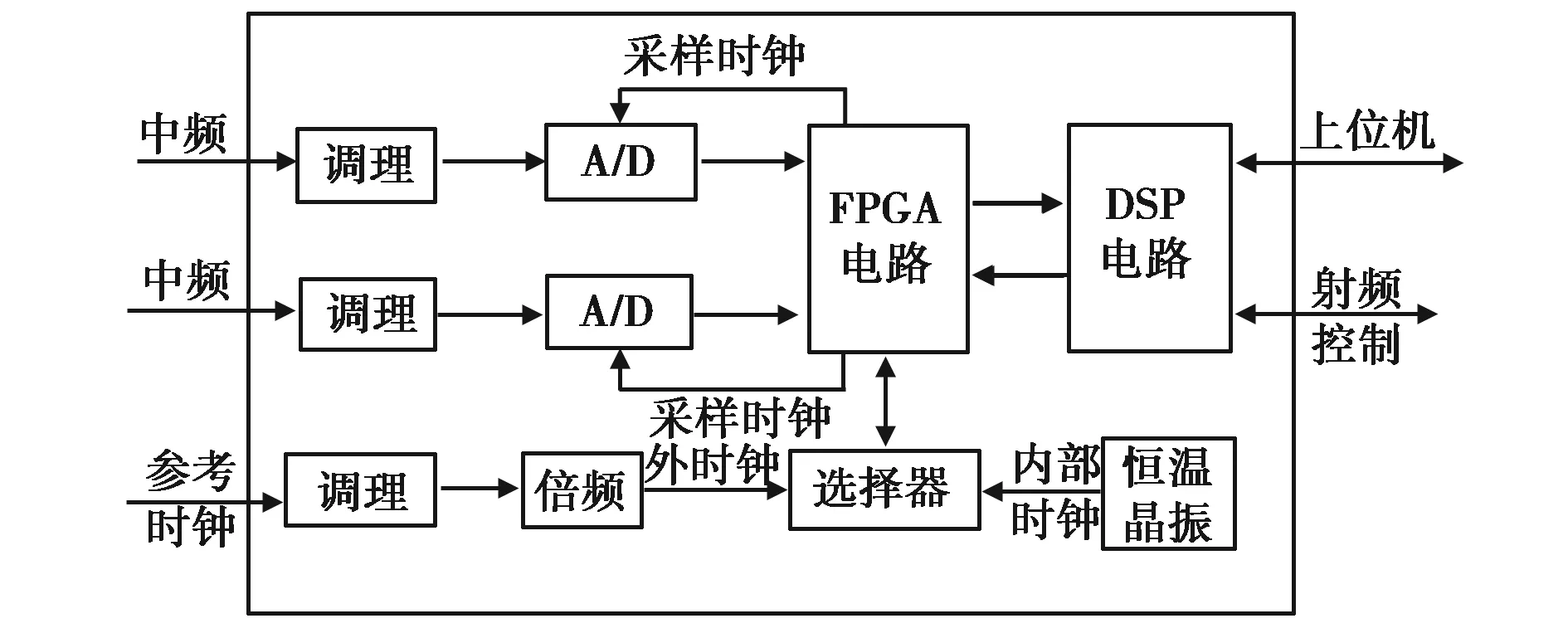
图9 中频处理模块硬件组成
中频处理模块将中频信号带通采样后,送入FPGA芯片进行数字混频、滤波、抽取,然后将FPGA处理后的数据送入DSP进行处理。DSP主要完成各种控制逻辑以及各种算法。
导航授时模块可以接收导航卫星定位授时信号,完成定位和授时功能。
2.3 应用软件
该软件由导航频段干扰频谱监测、干扰信号分析、干扰信号测向,干扰源定位、数据管理等功能模块组成。
软件流程图如图10所示,软件初始化成功后,通过网口连接的测向设备,进入多频道扫描,对干扰信号逐个测向,实时刷新显示界面,还可以跳转到对扫描到的干扰信号进行信号分析界面或定位界面。
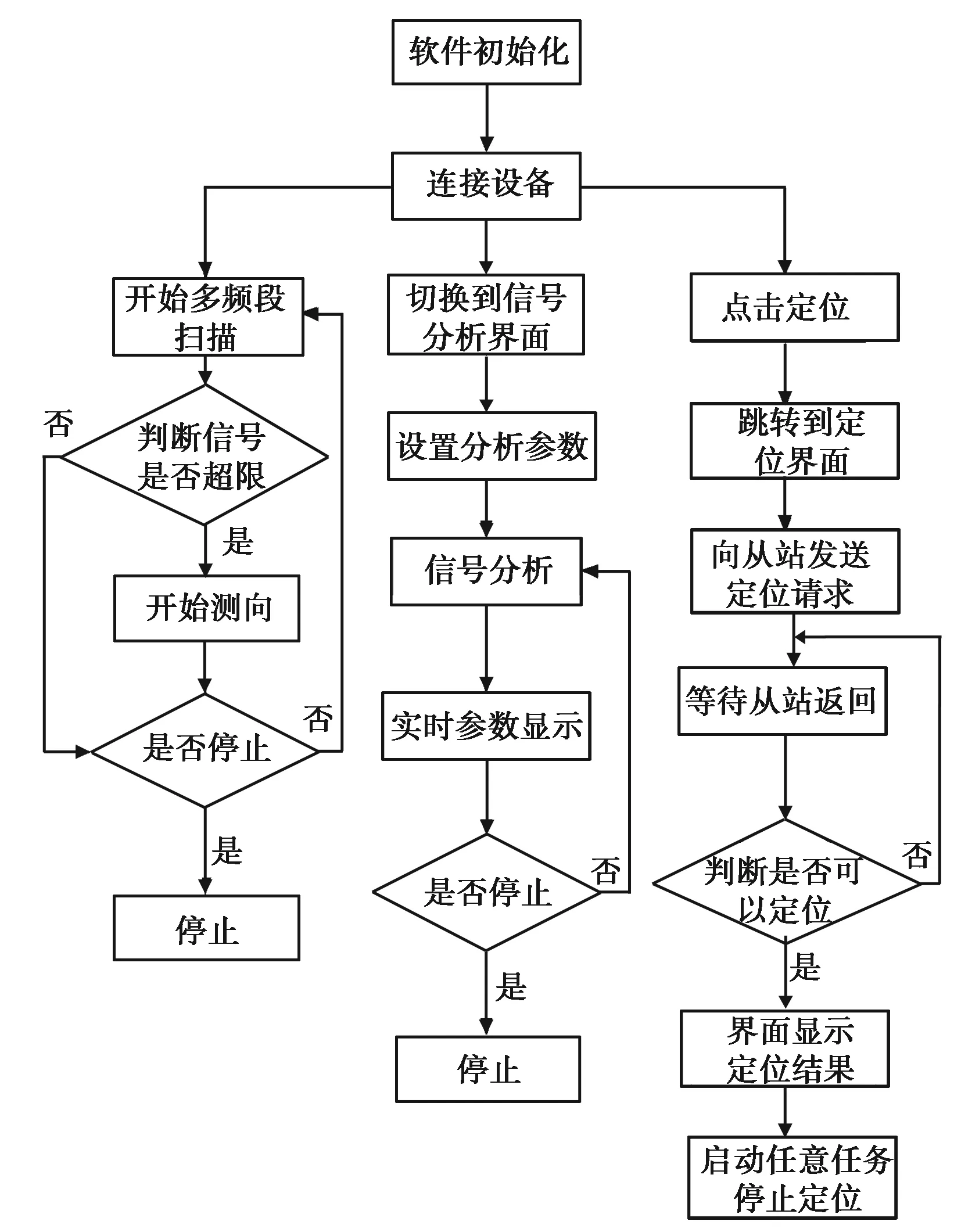
图10 应用软件流程图
2.4 采样校准分系统
采样校准分系统是为了获取校准数据而搭建,如图11所示,该系统由监测测向主机和天线(含升降杆和数控转台)、模拟信号源和发射天线、采集校准软件等组成。
采样校准分系统一般架设于空旷无遮挡、电磁环境好的标准场地,调整测向天线干扰发射天线高度使其四周无遮挡,放置干扰发射天线与测向天线距离使其满足远场条件,调整发射天线与测向天线同高。
采样流程如图12所示,采样软件主要完成各基线样本的提取,其流程与测向相同。采样软件通过界面可以设置同时采样的多个频段,设置完成后启动采样。采样进程按照设置,逐个频点进行样本获取,并存入文件。同时通过串口控制转台,通过网口控制信号源。
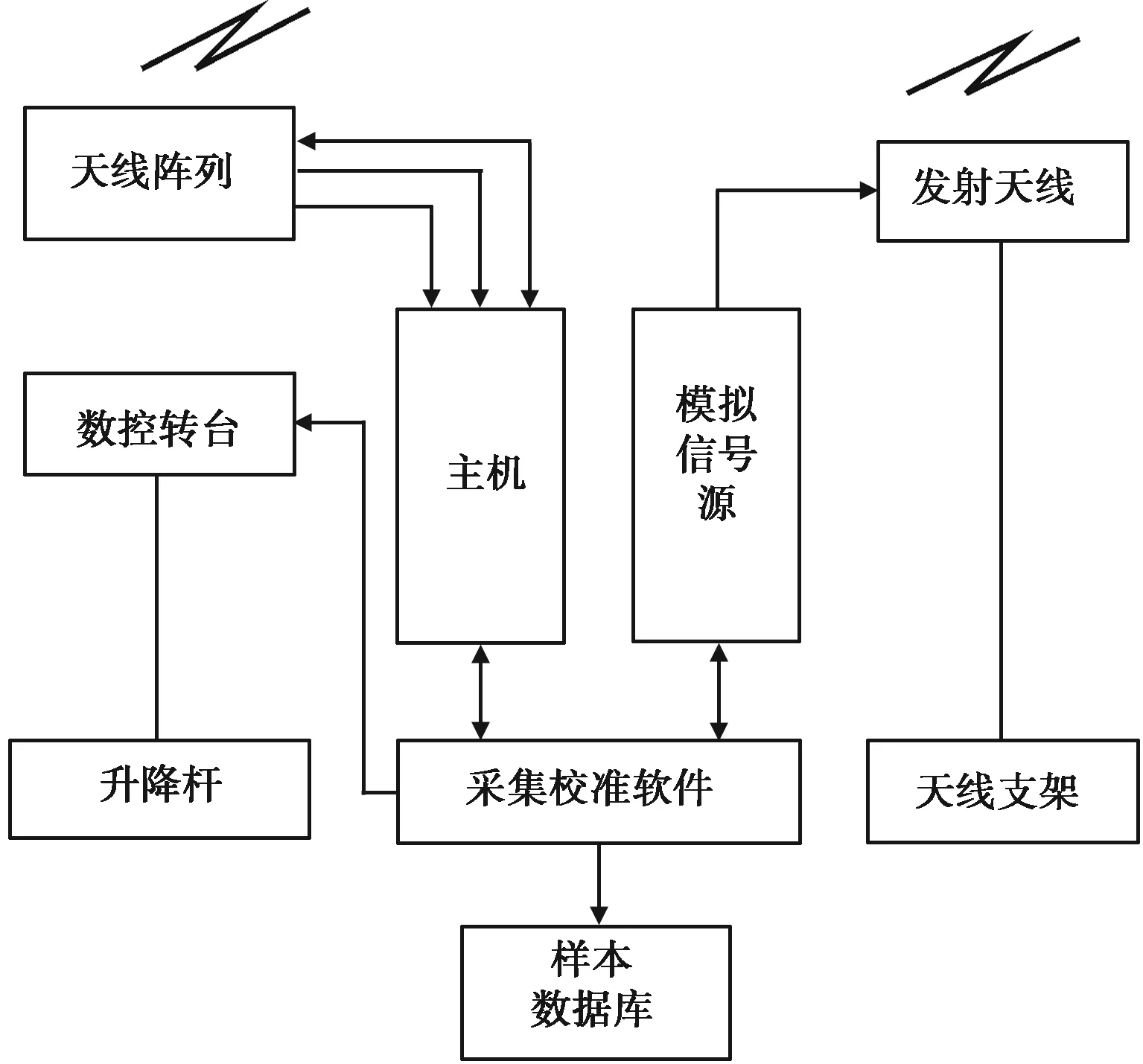
图11 采样校准系统
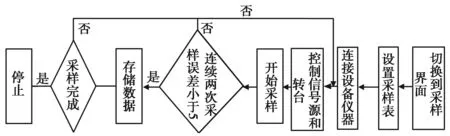
图12 采样软件流程图
3 系统验证及结果分析
3.1 测试场景
应在开阔的测试场条件下进行,远离强辐射源,无再次辐射场;测试在满足远场测试条件下进行,测试框图如图13所示。
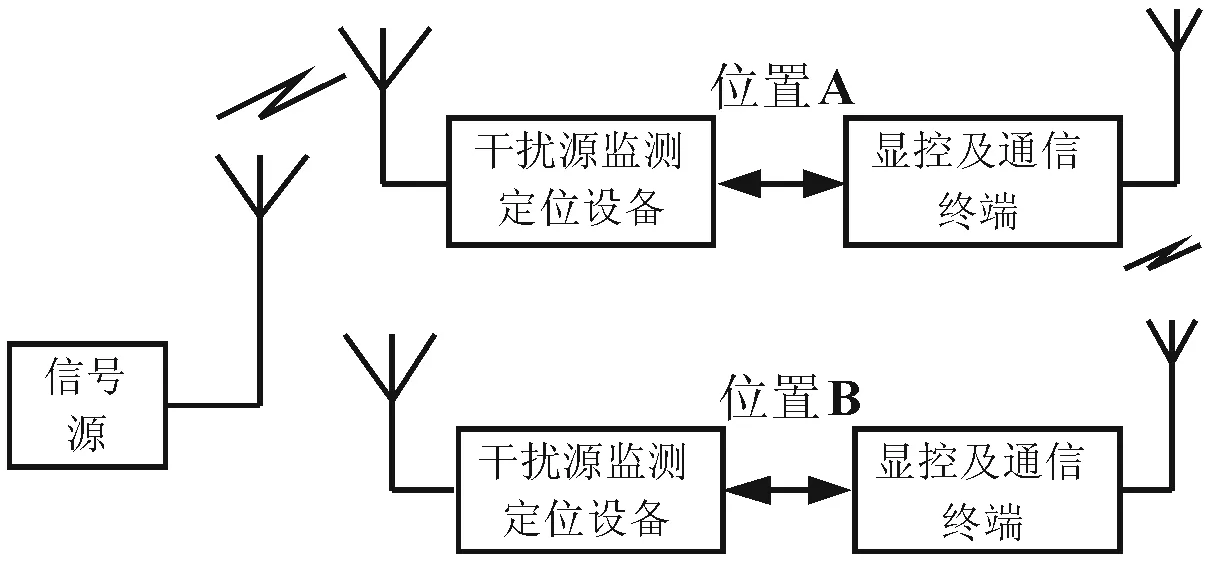
图13 外场测试框图
3.2 测试方法
1) 测向精度测试
在工作频段范围内随机选取K个频点,每个频点测试时随机转动L次监测测向天线,调整干扰源发射功率使到达接收机端信号功率高于底噪,并标定来波信号真实方位为θ,记录测量角度θi,j,统计测向精度,公式为
(21)
2) 测向灵敏度测试
在低中高频段范围内随机选取若干个测试频点,减小干扰源发射功率直至测向精度超出测向精度要求(测向精度测量方法如上),记录此时接收点处场强值。
3) 定位精度
两套监测测向天线间隔100m,干扰源发射天线与监测测向天线之间R为1 000 m,交汇定位若干次,统计圆概率误差(CEP)。
3.3 测试结果
1) 测向精度
按照3.2节中所述方法,选取K为12,L为6,统计72个测向结果的均方根值,测向精度为1.98度(含电子罗盘)。
2) 测向灵敏度
按照3.2中所述方法,在工作频段低中高各随机抽取频点,结果记录如表1所示。
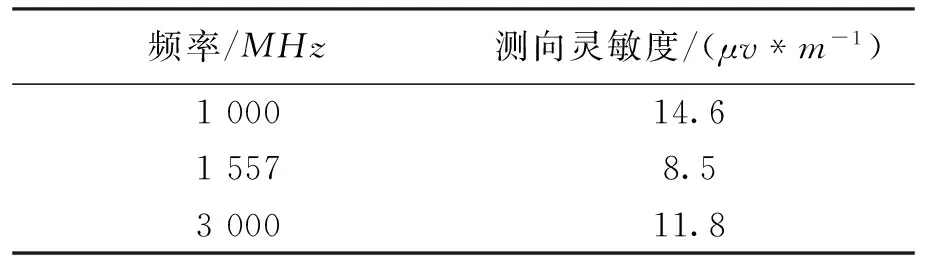
表1 测向灵敏度记录表
3) 定位精度
按照3.2节中所述方法,根据9次定位结果,计算得到CEP误差为8.6%R.
4 结束语
本文论述的GNSS 干扰监测定位系统具备良好的性能指标,能够满足GNSS干扰监测领域的干扰源检测与查找的需求,并且实现成本适宜,有利于工程化应用推广。
[1] Van DYKE K. National PNT architecture implementation[C]//FAA APNT Industry Day, 2012.
[2] MERRILL J. Patriot watch vigilance safeguarding america[R]. Homeland Security, 2011.
[3] ZHEN Weimin. IDM for GNSS open service in China[C]//The 6th meeting of International Committee on GNSS, 2011.
[4] WU Y W, RHODES S, SATORIUS E H. Direction of arrival estimation via extended phase interferometry[J]. IEEE Trans on AES, 1995, 31(1): 375-381.
[5] 李鹏.双通道相关干涉仪测向系统研究[D]. 西安:西安电子科技大学,2009.
[6] 李淳,廖桂生,李艳斌.改进的相关干涉仪测向处理方法[J].西安电子科技大学学报,2006,33(3),400-403.
[7] 杨小牛,楼才义,徐建良.软件无线电原理与应用[M].北京:电子工业出版社,2000.
[8] 魏合文,王军,叶尚福.一种基于余弦函数的相位干涉仪阵列DOA估计算法[J].电子与信息学报,2007,29(11):2665-2668.
Design and Realization of GNSS Interference Monitoring and Location System
YIN Zan, ZHANG Faxiang, ZHEN Weimin,YUAN Yaping
(ChinaResearchInstituteofRadio-wavePropagation,Qingdao266107,China)
For the normal operation of GNSS and its users, GNSS interference detection and Mitigation project is put forward in many countries. For the GNSS interference detection and Mitigation, it is essential to develop GNSS interference monitoring and location system suitable for engineering application. The design and realization of direction finding and location system based on correlation interferometer is proposed in this paper. The adoptive key techniques used in the design are discussed in detail, and the test methods and results are given in this paper. Because of its excellent performance and the low realization cost, the system has the broad application prospect in the field of satellite navigation interference detection and Mitigation.
GNSS; IDM; direction finding and location; correlation interferometer
2016-09-20
10.13442/j.gnss.1008-9268.2016.06.010
TN966
1008-9268(2016)06-0048-07
殷赞(1985-),男,工程师,主要从事电磁环境和卫星导航干扰监测研究和设备研制。
张发祥(1973-),男,高级工程师,主要从事电磁环境和卫星导航干扰监测应用研究。
甄卫民(1963-),男,研究员,主要从事空间环境、电磁环境和卫星导航领域研究。现任中GPS协会理事,中国空间学会空间物理专业委员会委员等。
袁亚平(1972-),男,高级工程师,主要从事电磁环境和卫星应用研究。
联系人:殷赞 E-mail: 272054530@qq.com
