MEMS-IMU随机误差的Allan方差分析
2016-02-21厉宽宽陈允芳程敏王云鹏
厉宽宽,陈允芳,程敏,王云鹏
(山东科技大学 测绘科学与工程学院,青岛 266590)
MEMS-IMU随机误差的Allan方差分析
厉宽宽,陈允芳,程敏,王云鹏
(山东科技大学 测绘科学与工程学院,青岛 266590)
随着微机电系统—惯性测量单元(MEMS-IMU)技术的发展,低成本惯性导航系统(INS)也得到广泛应用,MEMS-IMU在导航中的应用日益受到重视。但是MEMS-IMU中随机误差较大,通常会干扰和覆盖传感器中有用的信号,本文采用Allan方差方法对ADIS16405进行实测数据分析,辨别出ADIS16405随机误差的种类,并计算确定各误差项系数。实验表明该方法可以有效地辨识ADIS16405的主要随机误差成分,从而验证了Allan方差分析法用于MEMS-IMU误差分析的可行性。
MEMS-IMU;Allan方差;随机误差
0 引 言
MEMS-IMU具有体积小、重量轻、成本低、抗冲击、可靠性高等特点[1-3],在低成本导航系统中得到了越来越广的应用。但由于MEMS-IMU的精度较低,而导航解的精度又是由IMU输出值积分得到,因此IMU误差决定了最终导航解精度。所以如何更好的识别和评价MEMS-IMU误差的贡献程度,已成为MEMS-IMU研究的重点之一。根据IMU的误差特性,惯性传感器的误差可以分为确定性误差和随机误差[4]。确定性误差是传感器受到某种确切的物理现象的影响而产生的误差,这些误差可以在系统运行前,通过转台和温度试验进行提前标定,并在惯性传感器内部被修正[4-5]。随机误差是由一些不确定因素的干扰而引起的,这类误差一般通过在线补偿来实现。大量研究表明,当确定性误差被有效的补偿后,惯性传感器的随机误差将是影响捷联惯性导航精度的决定性因素[6]。因此,准确辨识IMU随机误差对提高导航精度非常重要。目前,常用的随机误差识别方法包括功率谱密度(PSD)、自相关函数估计、Allan方差估计等方法。而绝大多数文献都采用Allan方差法对MEMS-IMU随机噪声特性进行分析。
Allan方差分析法最初是1966年由美国国家标准局的David Allan为了研究原子钟的振荡器的稳定性而提出的[2,7],这种方法因其可以克服标准差对包含调频闪变噪声时出现的发散而得到广泛的应用。1980年,Allan方差被引入到陀螺仪的随机误差识别中,之后主要在中、低精度激光和光纤陀螺信号性能分析中使用。由于该方法的实用性强1998年Allan方差被IEEE协会选为分析光纤陀螺随机误差的推荐方法[8]。在2003年Allan方差第一次被应用到MEMS陀螺仪随机误差的分析中,并取得了预期的识别效果[1]。
Allan方差是一种基于时域的分析方法,它的特点是不仅能够确定产生数据噪声的基本随机过程的特性,而且能够识别给定噪声项的来源。它能非常容易地对误差源以及对整个噪声特性的影响程度进行细致的表征和识别,计算方便,易于分离。
本文主要通过对ADIS16405长时间输出的实测数据进行Allan方差法分析,并分别对得到的陀螺仪和加速度计的Allan方差-时间双对数曲线进行分析,结果表明,Allan方差分析法对ADIS16405的随机误差进行了有效的识别和分离。
1 Allan方差原理
Allan方差是一种从时域上对信号频域稳定性进行分析的通用方法,也就是将随机误差作为时间序列来处理,描述其均方误差的方法。下面介绍Allan方差对MEMS-IMU输出数据的处理过程[6,9-11]:
每一组的持续时间τ=Μτ0称为相关时间。
2) 对于第k个子集,其平均值可以表示为

(1)
3) 对每个不同平均时间计算Allan方差:
(2)
式中,〈·〉表示对无限时间序列的总体求平均值。对于不同的相关时间τ,可求得相应的Allan方差,Allan方差的平方根σΑ(τ)通常被称为Allan均方差。
4) 作出Allan标准差随平均时间变化的双对数曲线。然而在实际计算中,无限时间序列的条件是得不到满足的,随机误差的Allan方差可以从Μ个有限采样点中估计出来。在有限的数据中平均时间增大时,可划分的独立子集数目减少,这会导致Allan方差估计质量降低,Allan方差的百分比误差计算公式为
(3)
2 MEMS-IMU随机误差分析
MEMS-IMU的实测数据主要含有量化噪声、角度/速度随机游走、零偏不稳定性系数、角速率/加速随机游走、角速率/加速漂移斜坡五种随机误差源,以下是对这几种随机误差项的简要介绍。
1) 量化噪声(QuantizationNoise)
量化噪声是一种模拟信号转换为数字信号而产生的一种误差,它是由IMU输出的理想值和量化值之间存在的微小差别而引起的[5]。
2) 角度/速度随机游走(Angle(Velocity)RandomWalk)
陀螺的角度随机游走/加速度计的速度随机游走属于高频误差项,它是由自相关时间小于采样时间时引起的,然而这种误差大部分可以通过合理的设计进行消除。
3) 零偏不稳定性噪声(BiasInstability)
这种误差的来源是电路噪声、环境噪声及其他易受随机闪烁影响项。由于低频特性,偏值在数据中表现为波动性。
4) 角速率/加速随机游走(AnglerRate/AccelerationRandomWalk)
这是一种还没有确定其来源的随机过程,可能是有着极长相关时间的指数相关噪声的极限情况[13]。
5) 角速率/加速漂移斜坡(AnglerRate/AccelerationDriftRamp)
在较长的时间间隔中这种误差可认为是确定性误差,而不是随机噪声,并持续很长时间。
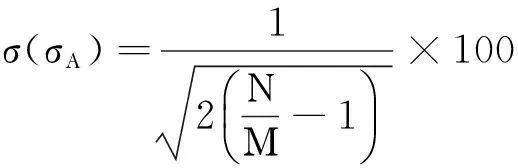
表1中示出了MEMS-IMU的5种典型随机误差项与Allan方差的对应关系。
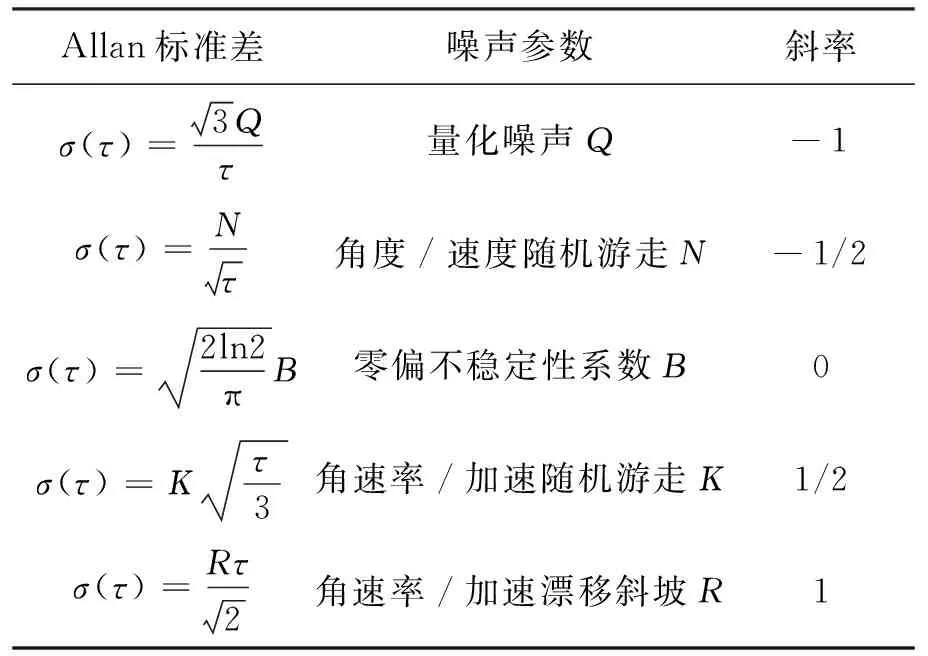
表1 Allan标准差与常见噪声的对应关系
在利用Allan方差对惯性器件输出数据进行分析处理时,认为惯性器件输出数据中的随机部分是由特定的噪声源产生的。如果能保证测试环境稳定,可认为各噪声源相互独立,则计算出的Allan方差是各类型误差的平方和[12],即
(4)
整理式(4),得到
(5)
式中,i=(-2,-1,0,1,2).
采用最小二乘法对得到的Allan方差曲线进行拟合,可以得到对应的误差值及Ci值。再根据对应系数得到相应的误差系数为
(6)
3 MEMS-IMU实测数据及其误差项分析
在室温下对ADI公司生产的ADIS16405惯性传感器进行数据采集、实验处理与分析。采用Allan方差法对采集的ADIS16405输出数据进行处理与分析。图1为Allan方差流程图。
图1 Allan方差计算流程图
实验采集过程中,将惯性传感器固定在静止的位置速率转台上,由转台为其提供水平基准。预热30min以50Hz的采样频率采集4h陀螺仪和加速度计数据,一次采样得到的ADIS16405陀螺仪和加速度计原始漂移数据如图2,图3所示。
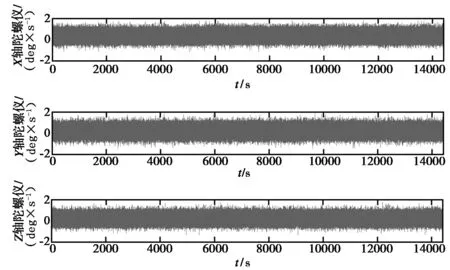
图2 ADIS16405陀螺仪原始数据
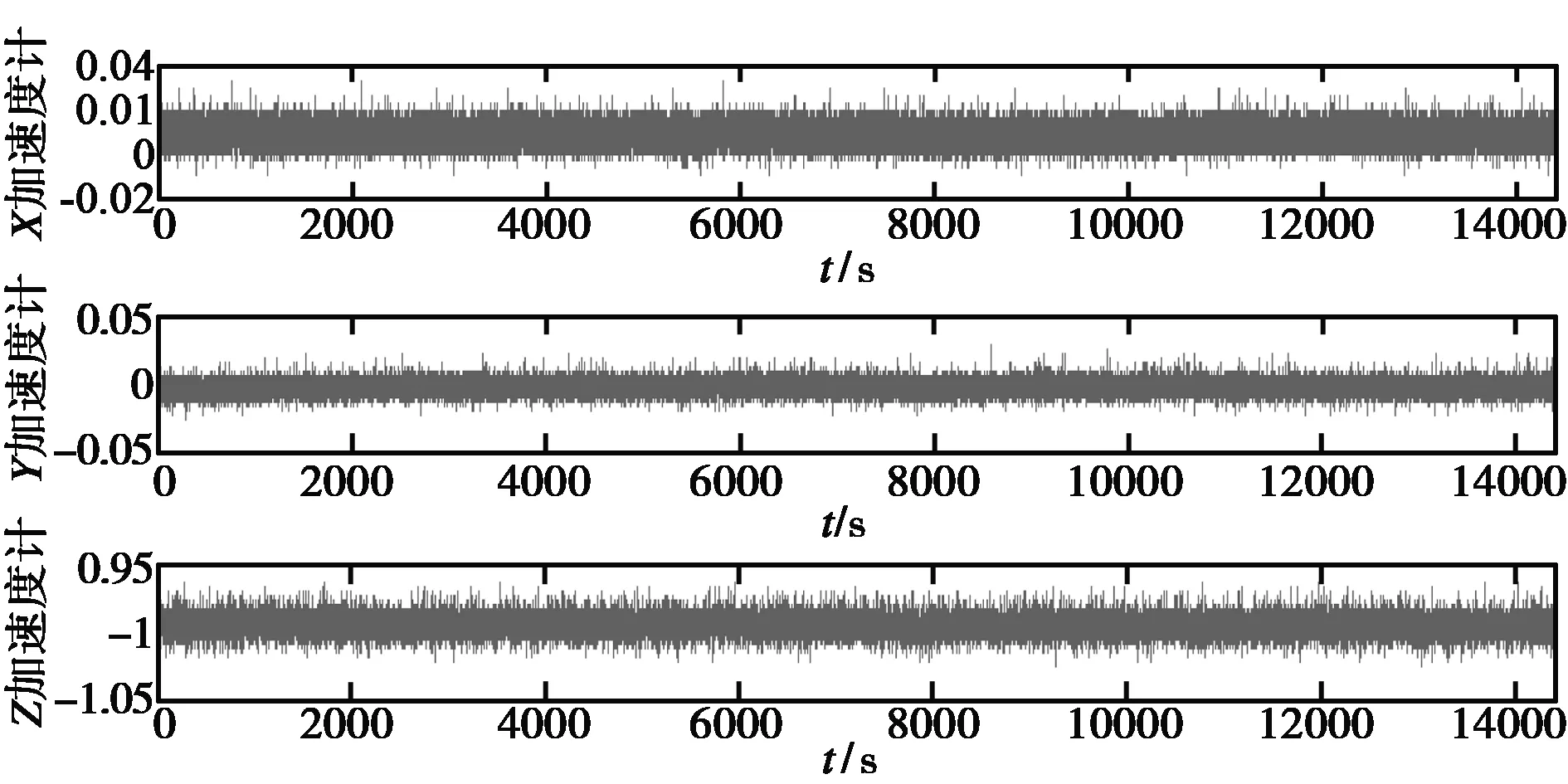
图3 ADIS16405加速度计原始数据
对采集的数据进行Allan方差分析,得到的结果如图4和图5所示,图4和图5分别为ADIS16405陀螺仪和加速度计的Allan方差分析结果图。根据图中曲线的斜率可知ADIS16405陀螺仪的随机误差项主要包含量化噪声、角度随机游走和零偏不稳定性,加速度计的随机误差项主要包含量化噪声、速度随机游走和零偏不稳定性。在平均时间较小的部分,Allan方差曲线的斜率均为-1左右,与其相对应的主要误差项为量化噪声Q.图4中一百到几千秒量级的平均时间范围内斜率为-1/2,角度随机游走Ν是主要误差项。由图5中一百到几百秒量级的平均时间范围内斜率为-1/2,速度随机游走Ν是主要误差项。由图4、图5可知,在更大平均时间范围内斜率为0左右,对应的随机误差项为零偏不稳定性Β,对于更长的平均时间而言,限于采集的数据长度用于做Allan方差分析的独立子集个数有限,因此,其置信程度较低,本文不作分析。
对Allan方差分析结果进行最小二乘拟合可得到各主要误差项系数(计算结果保留五位有效数字),如表2,表3所示,分别为ADIS16405陀螺仪和加速度计主要误差项系数。
1) 从表2,表3可知ADIS16405陀螺仪和加速度计的量化噪声系数都比较小,表明数据采集精度比较高,还可以采用低通滤波器进一步降低量化噪声以提高ADIS16405 IMU的性能。
2) ADIS16405陀螺仪的角度随机游走系数较大,说明陀螺仪的电子器件的高频噪声比较大,从表3可知速度随机游走对加速度计也存在较大影响,可以采用频采样率和合理设计的滤波来降低该类噪声的影响,从而提高IMU的性能。
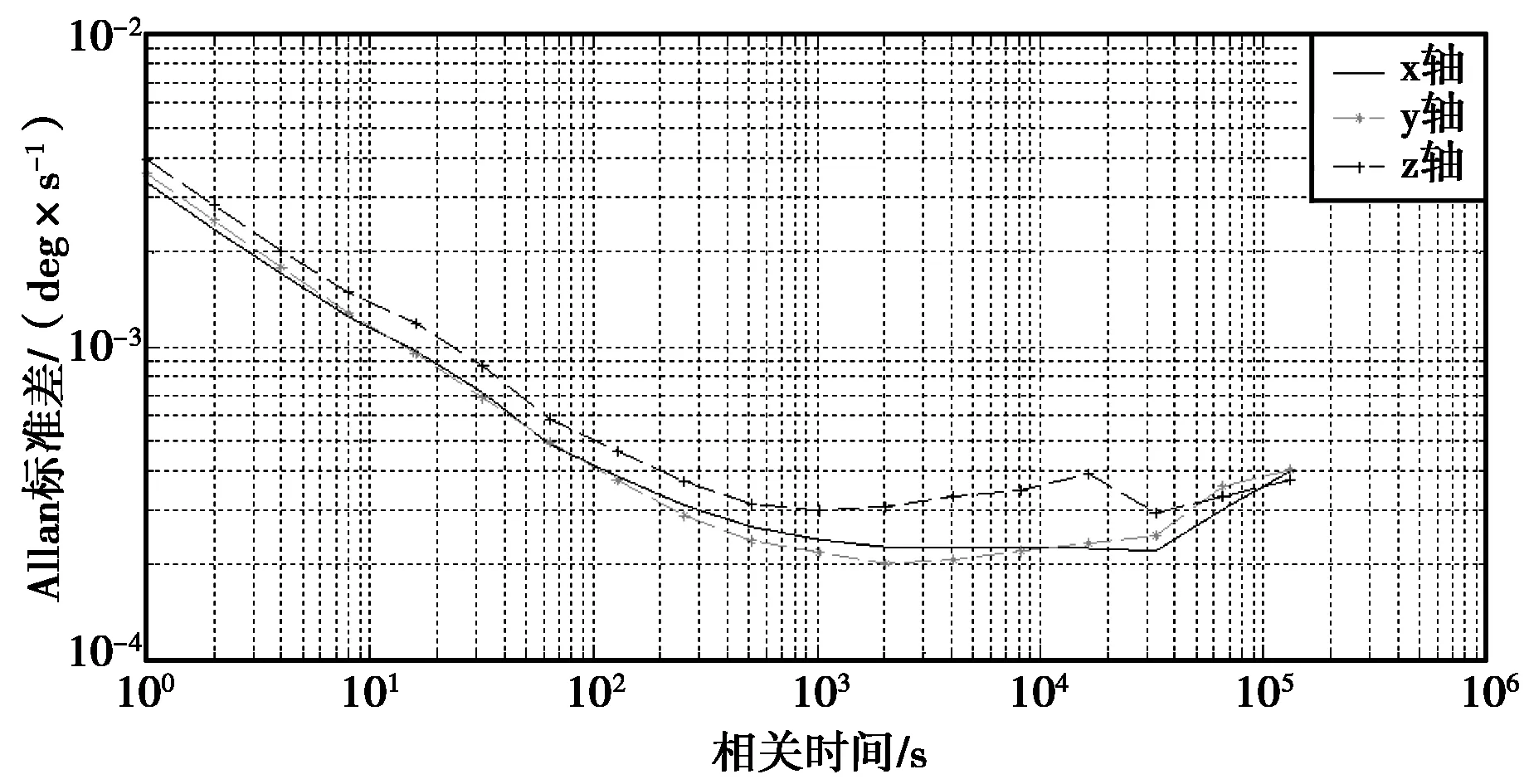
图5 ADIS16405加速度计Allan方差分析结果图
3) ADIS16405加速度计的零偏不稳定性系数相对其他项系数较大说明加速度计的电路模块稳定性较差和环境噪声影响较大。零偏不稳定性对陀螺仪也有一定的影响。

表2 ADIS16405陀螺仪随机噪声系数

表3 ADIS16405加速度计随机噪声系数
4 结束语
本文首先给出了Allan方差分析法的基本原理以及各误差项系数与分析结果之间的对应关系。对ADIS16405的实测数据进行分析,画出Allan方差-相关时间的双对数曲线,通过最小二乘拟合得到ADIS16405 IMU的几种主要随机误差系数,说明了Allan方差分析法用于MEMS-IMU误差分析的可行性。使用Allan方差分析得到的误差项结果可用于IMU误差建模、惯导独立导航以及组合导航等应用方面具有重要指导意义。
[1] WOODMAN O J. An introduction to inertial navigation Tech Rep UCAMCL-TR-696[R]. University of Cambridge, Computer Laboratory, 2007:1-17.
[2] 李荣冰,刘建业,曾庆化,等.基于MEMS技术的微型惯性导航系统的发展现状[J].中国惯性技术学报,2004,12(6):88-94.
[3] XIA D, YU C, KONG L. The development of micromachined gyroscope structure and circuitry technology[J]. Sensors,2014,14(1):1394-1473.
[4] VACCARO R J, ZAKI A S. Statistical modeling of rate gyros[J]. IEEE Transactions on Instrumentation and Measurement,2012,61(3):673-684.
[5] El-Sheimy N, HOU H, NIU X. Analysis and modeling of inertial sensors using Allan variance[J]. IEEE Transactions on instrumentation and measurement, 2008, 57(1): 140-149.
[6] 严恭敏,李四海,秦永元.惯性仪器测试与数据分析[M].北京:国防工业出版社,2012.
[7] ALLAN D W. Statistics of atomic frequency standards[J]. Proceedings of the IEEE, 1966, 54(2): 221-230.
[8] Institute of Electrical and Electronics Engineers. IEEE Standard Specification Format Guide and Test Procedure for Linear, Single-axis, Non-gyroscopic Accelerometers[S]. IEEE Aerospace and Electronic System Society, 2008.
[9] BHARDWAJ R, KUMAR V, KUMAR N. Allan variance the stability analysis algorithm for MEMS based inertial sensors stochastic error[C]//Computing and Communication (IEMCON), 2015 International Conference and Workshop on. IEEE,2015:1-5.
[10]CEMIGLIARO A. Timing experiments with Global Navigation Satellite System clocks[D]. Politecnico di Torino, 2012.
[11]赵思浩,陆明泉,冯振明.MEMS惯性器件误差系数的Allan方差分析方法[J].中国科学:物理学力学天文学,2010,42(5):672-675.
[12]李京书,许江宁,查峰,等.基于6类噪声项拟合模型的光纤陀螺噪声特性分析方法[J].兵工学报,2013,34(7):835-839.
Allan Variance Analysis for the Stochastic Error of MEMS-IMU
LI Kuankuan,CHEN Yunfang, CHENG Min,WANG Yunpeng
(CollegeofGeomatics,ShandongUniversityofScienceandTechnology,Qingdao266590,China)
With the development of MEMS-IMU, low-cost INS has been used widely, as well as the application of MEMS-IMU for INS. However, the large stochastic error will generally interference and override the effective signal in MEMS sensors. In this paper, Allan variance is adopted to analyze the measured data of ADIS16405, identify the types of random errors generated by ADIS16405 and determine the coefficients of individual stochastic error. Experiments demonstrate that this method can effectively recognize the main random errors of ADIS16405, which show the feasibility of Allan variance method applied in the error analysis of MEMS-IMU.
MEMS-IMU; Allan variance; random error
2016-06-29
10.13442/j.gnss.1008-9268.2016.06.020
P228.4
1008-9268(2016)06-0102-05
厉宽宽(1989-),男,河南开封人,硕士生,主要从事惯性导航技术。
陈允芳(1977-),女,博士,硕士生导师,主要从事大地测量学与测量工程专业相关教学和科研工作,研究方向为移动测图、组合导航与定位及精密工程测量等。
联系人:历宽宽 E-mail:13206368478@163.com
