智能车线性CCD路径识别方法
2016-01-29胡世林韩致信崔继强
胡世林,韩致信,崔继强
(1. 兰州理工大学 机电工程学院, 甘肃 兰州 730050; 2. 滨州学院,山东 滨州 256603)
智能车线性CCD路径识别方法
胡世林1,韩致信1,崔继强2
(1. 兰州理工大学 机电工程学院, 甘肃 兰州 730050; 2. 滨州学院,山东 滨州 256603)
摘要:论述了TSL1404CL线性CCD的识别原理,设计了CCD路径识别系统硬件电路,分析固定阀值与动态阀值以及固定中心点边缘检测与浮动中心点边缘检测的优缺点,运用LabVIEW软件编写上位机界面,获取了不同检测方法下的赛道信息,优化了系统的控制策略,提高系统的响应速度和准确性。实验证明该系统能在不同光照条件下准确识别赛道,具有很好的鲁棒性。
关键词:飞思卡尔;线性CCD;边缘检测
Research on Path Identification Method of Intelligent CarBased on Linear CCD
HU Shilin1, HAN Zhixin1, CUI Jiqiang2
(1. College of Mechanical and Electrical Engineering, Lanzhou University of Technology, Lanzhou 730050, China;
2. Binzhou University, Binzhou 256603, China)
Abstract:This paper discusses TSL1404CL linear principle of CCD and designs the hardware circuit of a CCD path identification system, analyzes the fixed threshold and dynamic threshold and the advantages and disadvantages of fixed centre point edge detection algorithm and floating point edge detection algorithm, uses LabVIEW to compile upper computer interface, achieves circuit information with different detection methods and optimizes the system control strategy to improve the response speed and accuracy. The experiment results show that the circuit can be accurately identified in this system and it has good robustness.
Keywords:freescale;linear CCD;edge detection
0引言
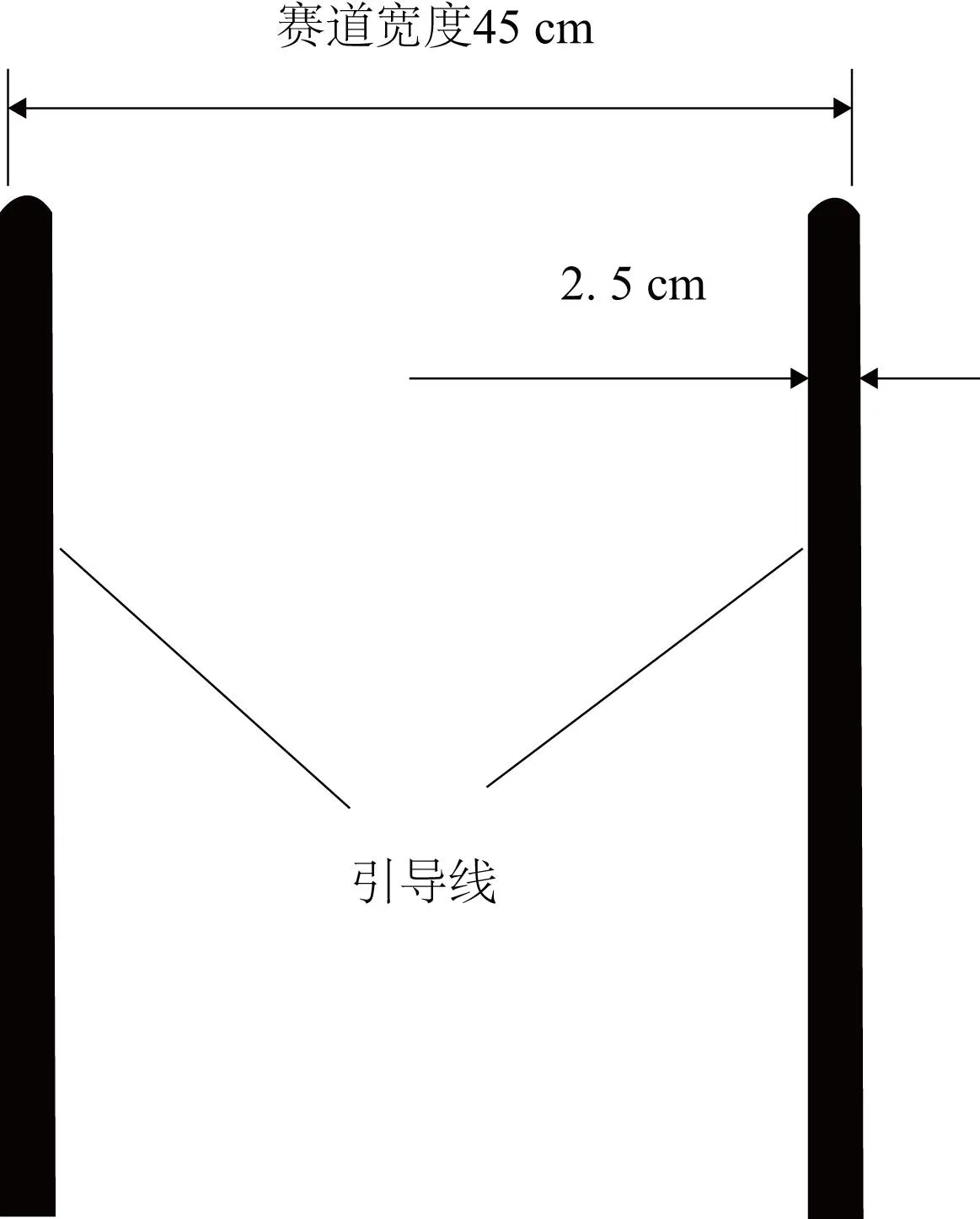
图1 赛道示意图
路径识别是自主循迹智能车实现控制并稳定运行的基础,道路信息提取的准确与否直接影响到控制策略能否实现。而道路信息提取的准确性取决于传感器能否准确地区分出黑色引导线与白色背景以及其他干扰信息。如图1所示,第八届飞思卡尔车模竞赛的赛道是一个具有特定几何尺寸约束、摩擦系数及光学特性的KT板,45 cm宽的白色KT板两边贴有宽度为2.5cm对可见光及不可见光均有较强吸收特性的黑色条带作为引导线。大赛规定赛道传感器选用线性CCD。线性CCD提取信号是被动的接受反射回的光线,因此,采集的信号易受外界环境的影响。例如,赛道黑色引导线很可能由于发生镜面反射而被误判为白色背景。所以,设计一个识别准确,抗干扰能力强的路劲识别系统,使智能车在不同光照条件下均能正常运行,这对自主循迹智能车是尤为重要的。
1线性CCD识别方案
该系统采用飞思卡尔MC9S12XS128单片机作为控制核心,将线性CCD捕获的模拟量赛道信息转化成数字信号,进行分析计算小车与赛道之间的偏差和赛道走势,进而控制小车沿赛道行驶而不偏离赛道。
该车道路传感器使用的是TexasAdvancedOptoelectronicSolution公司的TSL1401CL线性CCD。该传感器是包含128个光电二极管的线性阵列。每个光电二极管都有各自的积分电路,此电路统称为像素。每个像素在光电二极管的不同光能量冲击下产生不同的模拟电荷信号,该信号的大小与光强和积分时间成正比。在驱动时序的作用下,CCD将模拟电荷信号串行位移输出[1]。如图2中TSL1401CL的工作时序可知,串行输入SI控制每一个像素的积分和复位操作;CLK控制每一个像素电压的依次输出,每个像素的值可以在CLK的下降沿时从AO采集。
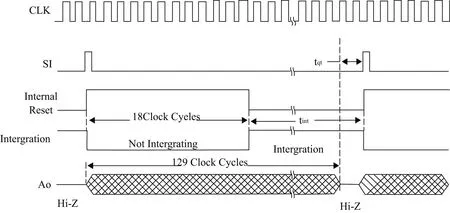
图2 TSL1401CL工作时序
2线性CCD外围电路设计
MC9S12XS128单片机的PA0和PA1口分别提供TSL1401CL的时钟输入和串行输入。AD0口与TSL1401CL的模拟电压输出口(AO)连接。试验表明TSL1401CL线性 CCD的输出信号和环境光线密切相关,分别在不同的光照环境进行采样,采样数据表明环境光线较弱时,CCD输出信号较低,以致赛道黑线信息不明显。晚上日光灯环境下输出信号电压值更低,几乎接近 0,根本无法辨别赛道信息。解决该问题的简单有效的方法就是增大输出电压,即放大输出信号,系统采用运放来放大 AO 输出信号[2]。其电路原理如图3所示。由式(1)可以得出电压增益(放大倍数)Av=11。
(1)
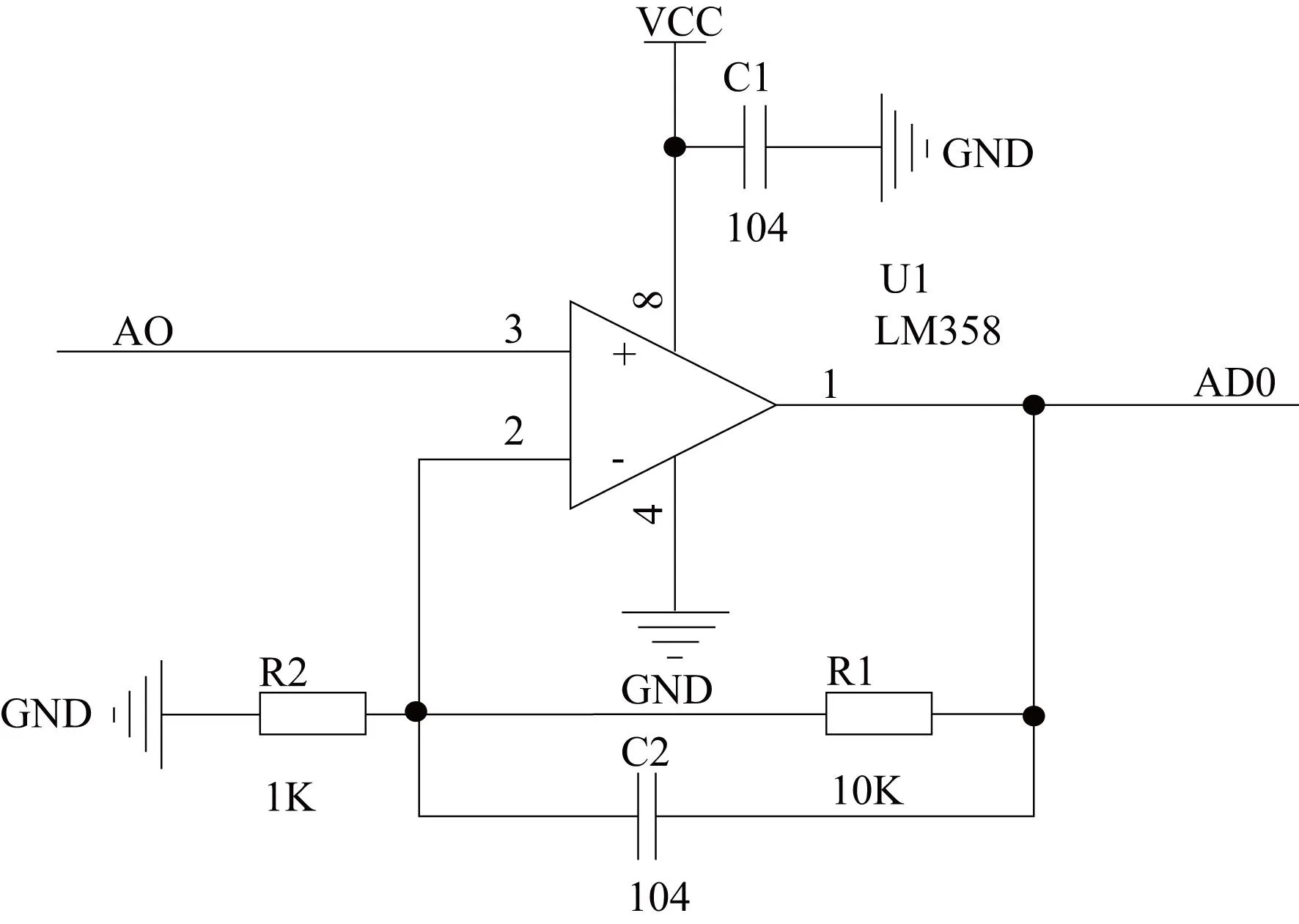
图3 CCD输出电压运放电路
3软件设计
3.1曝光时间(积分时间)计算
如果竞赛环境各个方向的光线均匀一致,则可以在赛车出发前根据环境光线调节一个合理的曝光时间,以得到合理的输出,这样赛车就能采用一个固定的曝光时间跑完全程。实际赛场会有场馆的窗户、赛道上方的灯光等光源,投射在赛道上的光线也并不均匀一致。所以需要赛车在赛道上适时地、动态地调整曝光参数。从TSL1401CL的工作时序可以看出曝光量和串行输入(SI)有关,所以系统中通过动态调整SI的周期实现曝光量的自动调整,该计算策略如图4所示。
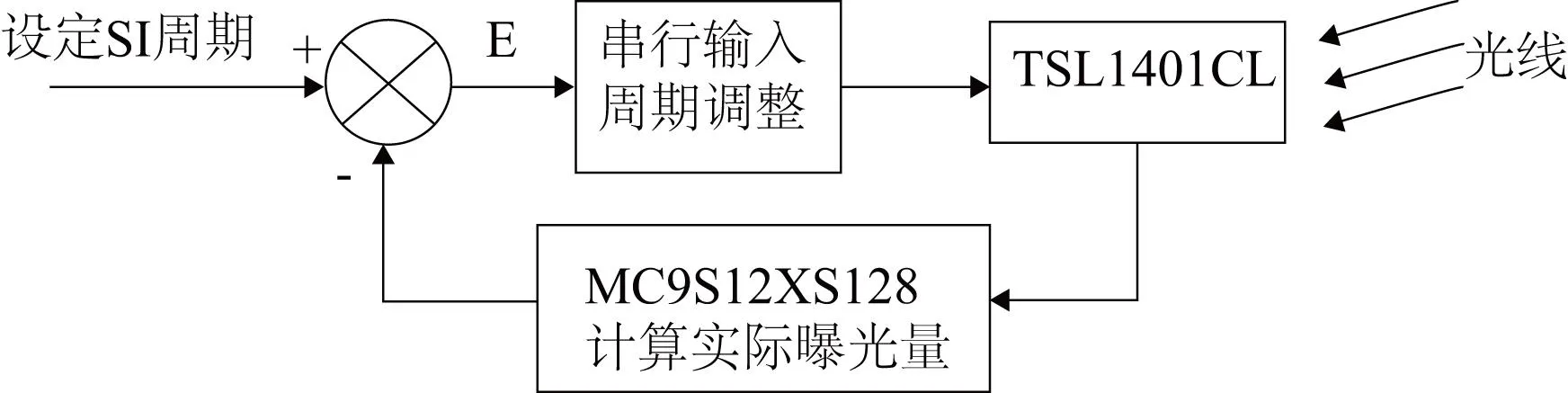
图4 动态曝光参数调节策略
从图4可以看出,该计算策略是一个典型的闭环控制,实际曝光量由上一次线性CCD捕获的白色赛道上的像素数据的平均值(pixel_average)得到。与设定的SI周期比较得出偏差E,根据偏差E调节本次曝光所需的SI周期,使之达到适应环境的目的。
3.2像素二值化处理
为了准确判断黑线的位置以及减弱赛道上噪点的干扰,需将CCD采集的图像进行二值化处理,把模拟信号转换成0和1的二值信号,便于后期的数据处理。处于黑线上像素点的模拟量(灰度值)远远小于处于白线上像素点的模拟量,故选取处于黑线和白线两个模拟量之间的一个值作为阀值。灰度值大于该阀值为1,反之为0。图像的阀值变换函数为[4]:

(2)
由于赛场光线的不均匀,该阀值T也需要根据光线的强弱而变化,即动态阀值。原理是计算出上一次采集的白线灰度值的平均值,再将该值乘以一个系数作为当前场的阀值,以适应不同的光照条件。
如图5所示,将数据发送至LabVIEW软件编写的上位机可以看到该方法具有良好的效果。

图5 动态阀值二值化数据
3.3赛道偏差计算
赛道偏差计算采用边缘检测法,即扫描像素二值化之后0和1的跳变沿。可通过单边扫描和从中心向两边扫描两种方式实现,如图6所示。
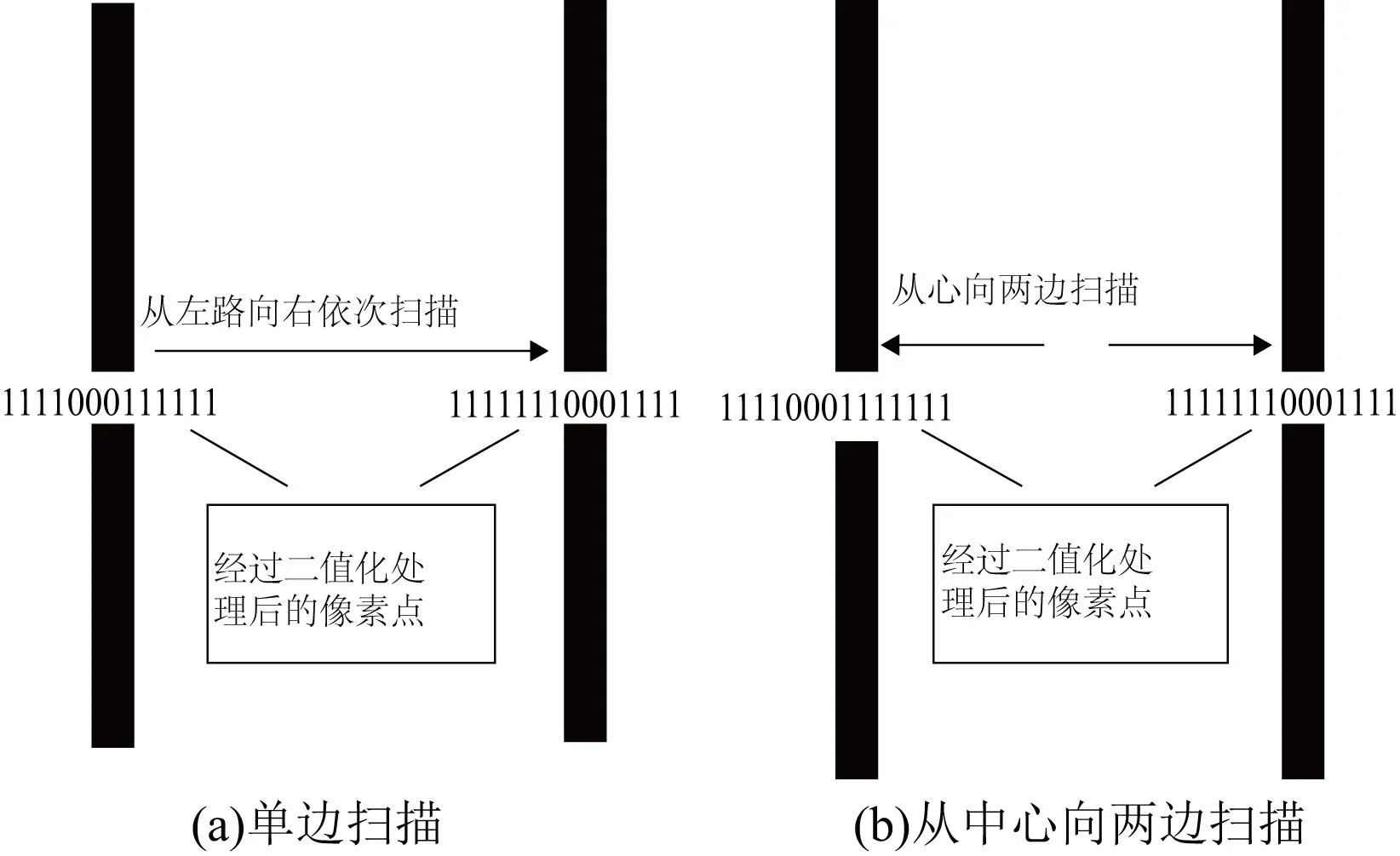
图6 两种边缘检测方法示意图
由于赛道引导线处于赛道两边,若采用单边检测容易出现左右两边引导线混淆的情况,故系统中采取从中心向两边扫描的方式,左右两边同时寻找从1跳变到0的像素点位置。第64个像素点向第1个像素点扫描,得到左边引导线的位置Error_L,第65个像素点向第128个像素点扫描,得到右边引导线的位置Error_R,Error_L和Error_R符号相反。从中心到两边分别取值为64~1和-64~-1,赛道偏差Error=Error_L+Error_R。当小车处于直道时Error_L与Error_R互为相反数,此时Error=0;当小车处于弯道时Error_L与Error_R绝对值不同,两个值求和之后就可以计算出赛道偏差,用于后期数据处理。由于小车驱动电机的反应具有滞后性,高速行驶于弯道时容易出现第64个像素点与第65个像素点同时落在黑线上的情况,如图7(a)所示。此时从中心到两边像素点都没有从1到0的跳变,Error就为0,从而出现丢线的情况。为了避免这种情况的发生,采用浮动中心点的方法,即扫描并不是固定的从第64和65个像素点向两边进行,而是根据上一次的赛道偏差计算出本次扫描的起始位置。如图7(b),当小车处于左转弯时扫描起始位置向左移动,反之向右移动。实验证明用该方法很好地避免了因扫描中心点落在黑线上而导致的丢线。如图8所示,此方法也增大了Error的范围。这使得小车在转向时具有更好的连续性。
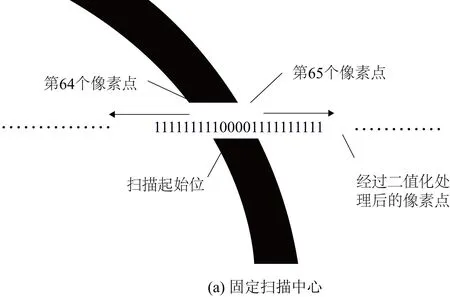

图7 不同方法下扫描示意图

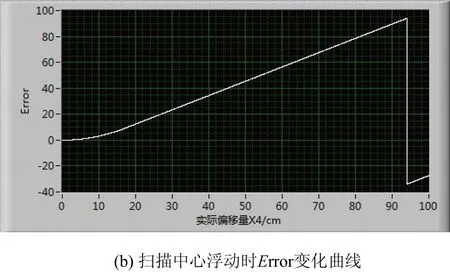
图8 扫描中心不同时Error的变化情况
4结语
基于线性CCD设计了两轮直立智能车的路径识别系统。采用TSL1401CL 线性 CCD采集赛道信息,MC9S12XS128单片机作为控制核心;利用动态阀值和边缘检测获取赛道偏差。实验表明:小车能在不同的光照条件下准确识别赛道信息,并沿黑色引导线平稳行驶。该方案已在第八届“飞思卡尔”杯全国大学生智能车竞赛中得以应用,并且取得了优异成绩。
参考文献:
[1] 曾峰,易茂祥. 图像采集系统的线性CCD驱动电路设计[J]. 合肥工业大学学报,2009,32(1):120-123.
[2] 康华光. 电子技术基础[M]. 北京: 高等教育出版社,2006.
[3] 李晨,宓超. 基于飞思卡尔单片机MC9S12XS128的智能车设计[J]. 上海海事大学学报,2012,33(1):82-84.
[4] 王烁,孙备,侯代坡,等. 基于Hough的图像分割在智能车图像处理中的应用[J]. 机械与电子,2013,(5):65-68.
[5] 李丙旺,张友照,陈文建. 基于PID分段式温度控制系统[J]. 兵工自动化,2011,30(9):83-85.


收稿日期:2014-01-02
中图分类号:TP273
文献标志码:B
文章编号:1671-5276(2015)04-0123-03
作者简介:胡世林(1988-),男,陕西汉中人,硕士,研究方向为机械工程。
基金项目:滨州学院创新基金资助(BZXYQNLG201101)
