电动葫芦能效建模与仿真
2016-01-29秦伟皓王松雷陆忠华徐榕
秦伟皓,王松雷,陆忠华,徐榕
(1. 上海交通大学 机械与动力工程学院,上海 200240;2. 江苏省特种设备安全监督检验研究院 无锡分院,江苏 无锡 214174)
电动葫芦能效建模与仿真
秦伟皓1,王松雷2,陆忠华2,徐榕1
(1. 上海交通大学 机械与动力工程学院,上海 200240;2. 江苏省特种设备安全监督检验研究院 无锡分院,江苏 无锡 214174)
摘要:提出了一种用于评价电动葫芦能效的指标——能效系数,并给出了用于计算能效系数的数学模型,在MATLAB/Simulink中进行相应的仿真。以CD116-9型电动葫芦为例,探究了负载和行程对能效系数的影响规律。通过现场实验的结果验证了仿真模型的正确性,并对实验与仿真结果之间的差异进行了分析。
关键词:电动葫芦;能效数学模型;能效仿真模型;能效系数;能效测试
Modeling and Simulation for Electric Hoists’ Energy Efficiency
QIN Weihao1, WANG Songlei2,LU Zhonghua2, XU Rong1
(1. School of Mechanical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China;
2. Jiangsu Institute of Special Equipment Safety Supervision and Inspection, Wuxi Branch, Wuxi 214174, China)
Abstract:This paper introduceds energy efficiency coefficient which can be used as an index for evaluating electric hoists’ energy efficiency, gives out its mathematical model and builds its simulation model in MATLAB/Simulink environment. In addition, it also uses the simulation model to discuss the influence of two factors on the energy efficiency efficient. And then it validates our simulation results by field test and analyzes the differences between simulation and test results.
Keywords:electric hoist; energy efficiency mathematical model; energy efficiency simulation model; energy efficiency coefficient; energy efficiency test
0引言
节约能源是一项重要措施,能够在一定程度上提高经济效益,是增强企业竞争力的必然要求。以电动葫芦作为起升机构的起重机是使用量最大、数量增长最快的起重机品种。研究电动葫芦的能效测试方法,对电动葫芦能效等级划分、能效检测和节能设计、节能监管等都具有重要意义。
目前尚未发现将电动葫芦作为完整的机构进行能效测试和评价对象的国外文献[1],国内在电动葫芦领域能耗测试方法领域的研究和应用刚刚起步[2],仅有少量的研究成果。目前对于电动葫芦的能效研究存在以下一些不足[3]:1) 目前采用的能效评价指标不太适用于以起降循环为基本运行单位的电动葫芦;2) 对于电动葫芦能效的理论分析涉及很少;3) 没有系统的研究各种影响因素对电动葫芦能效影响的规律[4],而这些规律是制定合理的能效测试方法的依据。文中针对现有研究的不足,做了一些探索。
1电动葫芦的分类与结构特点
以结构特点作为分类标准,我国通常将电动葫芦分为常速钢丝绳电动葫芦、常慢速钢丝绳电动葫芦、环链电动葫芦、板链电动葫芦等几种型式。
虽然电动葫芦的具体形式很多,但是从结构组成和传动形式上来看则大同小异。现以常见的CD型钢丝绳电动葫芦为例。CD型钢丝绳电动葫芦由驱动部分、制动部分、传动部分和取物缠绕部分组成[1]。其中驱动和制动两个装置是合二为一的锥形制动鼠笼电动机,传动装置为三级或四级圆柱齿轮减速器,取物装置为吊钩、钢丝绳和卷筒。从结构组成和能量传递的角度来看,可将电动葫芦划分为电气传动部分和机械传动部分。需要注意的是,电动葫芦的制停采用的是二合一锥形电机的锥形制动器,是一种机械制动。CD型钢丝绳电动葫芦在下降物时,采用的是回馈制动方式,由锥形驱动电机提供与重物的重力矩相互抵消的电磁转矩。
2电动葫芦运行特点
电动葫芦的驱动电机承受的负载转矩由两部分组成:一部分是由吊钩上重物的重力产生的位能性负载转矩Tz;另一部分是由于机械传动系统的摩擦产生的阻抗性负载转矩Tf。为简化分析,当电动葫芦提升或者下降重物时,忽略摩擦转矩Tf,仅考虑由重力产生的位能性转矩TZ。而当电动葫芦空钩上升和下降时,忽略吊钩的质量,仅考虑传动系统的摩擦转矩Tf[2]。电动葫芦在各种负载状态下的工作特性如图1所示。

图1 电动葫芦四象限运行时的工作特性
当电动葫芦提升重物时,锥形驱动电机将沿第一象限的机械特性曲线ab加速运行,并最终稳定在b点。这个过程中,电机处于正向电动状态,从电网中吸收有功电能。当电动葫芦下降重物时,驱动电机将首先沿着第三象限的机械特性曲线a’c’加速运行,这个过程中,电机的转速小于同步速,处于反向电动状态,从电网吸收电能。随着电机转速的进一步升高,电机将继续沿着第四象限的机械特性曲线c’b’加速运行,并最终稳定在b’点。这个过程之中,电机处于回馈制动状态,向电网回馈电能。
当电动葫芦空钩上升时,电机的工作特性与提升重物时是相同的,只是电机承受的负载转矩为较小的摩擦转矩。因此,驱动电机仍然沿第一象限的机械特性曲线加速运行,但最终稳定在d点。此时电机处于正向电动状态,从电网中吸收有功电能。而当电动葫芦空钩下降时,驱动电机将沿第三象限的机械特性曲线a’d’加速运行并最终稳定在d’点。整个过程中,电机始终处于反向电动状态,从电网吸收电能。
3电动葫芦能效评价指标
电动葫芦是一种间歇工作的垂直运输工具,运送的载荷属于位能性负载。通常的工作方式是将一定量的载荷运送到上方,也需将这些载荷运回到下方,上下运送量基本相等。电动葫芦的能效评价时应当对一个包含上升和下降两个过程的完整工作循环进行考察,而不单单是考察上升或者下降过程中的效率,因此不能简单借用传统的以单向能量传递为主要工作形式的能效指标(如:电动机的效率)。
为了体现电动葫芦以起降工作循环作为运行基本单位的工作特点,提出以电动葫芦能效系数δ作为评价电动葫芦能源利用效率的指标。电动葫芦能效系数是指完成单位输送量kgm(千克米)的用电量J(焦耳)。
电动葫芦能效系数δ的定义式如下:
式中:δ——电动葫芦的能效系数,单位为J/kgm;
Ec——电动葫芦在规定的工作循环内,从电网输入的电能(测试值),单位是J;
Wz——电动葫芦在测试周期内,吊钩运送有效载荷完成的工作量,即每次运送的有效载荷质量m(负载)与被移动的垂直起升距离h(行程)之乘积,单位为kgm;
Ec1——起升重物的过程中,电动葫芦从电网中吸收的有功电能,单位是J;

根据能效系数的定义可知:能效系数越大表明完成单位工作量时浪费的电量越多,则电动葫芦的能效越低。
采用能效指标δ对电动葫芦的能效进行评价有以下几个优点:1) 物理含义清晰,能够直观地反应出电动葫芦的能耗水平。2) 这个指标可以把重物的上升和下降过程统一在一起,可以反映电动葫芦以起降工作循环为基本工作单位的特点。3) 能效系数指标的建立思想与世界能源委员会对“能源效率”定义——“减少提供同等能源服务的能源投入”的思想基本一致。
4电动葫芦能效数学模型
常见的电动葫芦可以分解为电气传动部分和机械传动部分2个组成部分。
电动葫芦的电气传动部分的关键是鼠笼型三相异步电动机。为了能够更加精确地描述电机的动态过程,对电机采用瞬态数学模型加以描述。在自然坐标系下电机的瞬态数学模型是一个高阶、非线性、强耦合的常微分方程组,为了计算的方便,先给出驱动电机在正交旋转坐标系d-q-0坐标系下的瞬态数学模型[3]。然后再通过坐标反变换,将d-q-0坐标系下的各个电量还原到自然坐标系中,再进行电机部分的能量传递和损耗分析。
电动葫芦的驱动电机在d-q-0坐标系下的瞬态数学模型主要由状态变量的初始值和状态方程两部分组成,如式(1)。
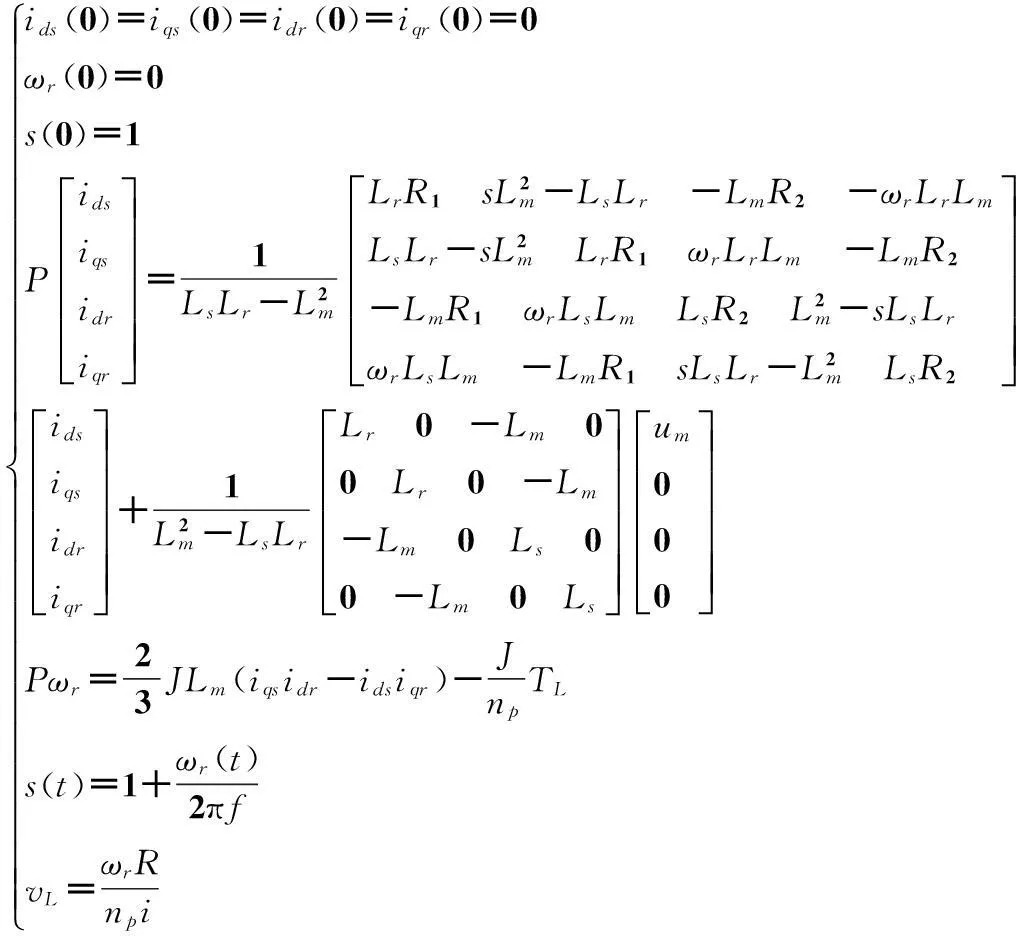
电动葫芦的机械传动部分则采用等效折算的方法,即将负载的重力矩折算为电机轴上等效负载转矩,并将位于不同轴位置上的飞轮矩折算为电机主轴上的等效飞轮矩,将机械传动部分的多轴系统等效为一个单轴系统。
负载转矩由式(2)确定。
起升重物时:
(2)
式中,t1为起升重物阶段电机启动的时刻,t2为起升重物阶段电机断电的时刻。
下降重物时:
(3)
显然,当给出电机的输入电压参数以及重物的质量m时,并将电机参数代入方程,就可以通过求解方程得到ids、iqs、idr、iqr以及重物的线速度vL。
为了得到电机的输入功率,还需要求解在自然坐标系下的电机定子电流iA、iB、iC。iA、iB、iC与ids、iqs存在如下的关系:
(4)
其中,θc=θc(0)+2πf(t2-t1);t1为电机通电的时刻;t2为电机断电的时刻。
将上面求解的结果带入到能效系数δ的计算公式:
(5)
就得到了电动葫芦的能效数学模型。
5电动葫芦能效仿真
5.1电动葫芦能效仿真模型
上述一节中建立的电动葫芦能效数学模型是一个复杂的非线性常微分方程组,无法得到其解析形式解,只能借助数值计算方法,在此借用MATLAB的仿真工具箱Simulink中建立与数学模型相应的电动葫芦能效仿真模型。该仿真模型包含起升重物过程能效仿真和下降重物过程能效仿真两部分,两个部分的结构大致相同。下面以起升重物过程能效仿真模型为例,说明仿真模型的构成。起升重物过程电动葫芦能效仿真模型的电气传动部分和机械传动部分的仿真模型分别如图2和图3所示。
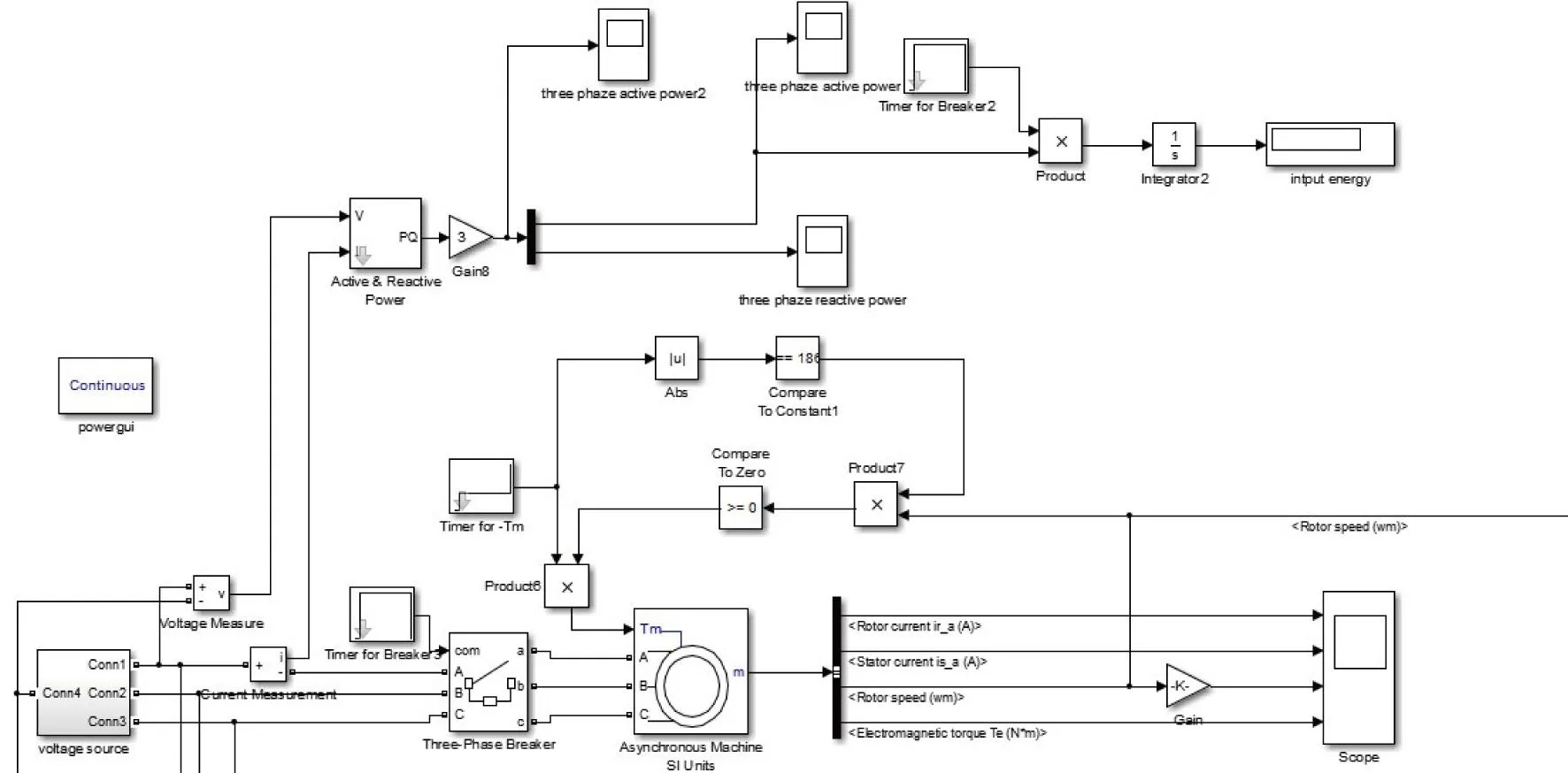
图2 电动葫芦的电气传动部分仿真模型

图3 电动葫芦的机械传动部分仿真模型
将上述的两个模型连接在一起就可以得到电动葫芦起升重物过程的能效仿真模型。采用同样的方法可以得到电动葫芦下降重物过程的能效仿真模型。
以CD116-9型电动葫芦为例设定仿真模型参数,通过仿真结果来初步验证能效仿真模型的合理性。CD116-9型电动葫芦以及所用的电动机的铭牌参数分别如表1、表2所示。

表1 CD1 16-9型电动葫芦铭牌参数
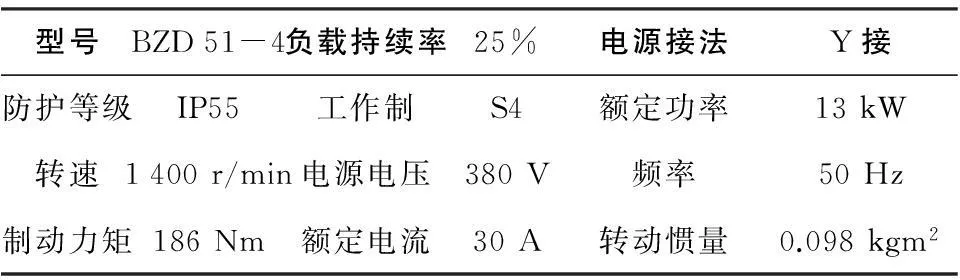
表2 CD1 16-9型电动葫芦锥形
图4从上到下显示的依次是起升重物过程中电机的定子A相电流、转子a相电流、转速和电磁转矩。从图4可以看出,电动机的速度在经历了短暂波动以后维持在一个略小于同步速的稳定速度上;启动过程明显,刚启动时,定、转子的冲击电流很大,在匀速状态下电流输出稳定,符合实际情况。图5显示的是电动葫芦起升重物过程中电机从电网获得的有功功率(实线)和无功功率(虚线)。可以看出,在电机启动瞬间的瞬时功率较高,随后恢复到一个稳定的水平,反映了电机启动过程中瞬时电流冲流。
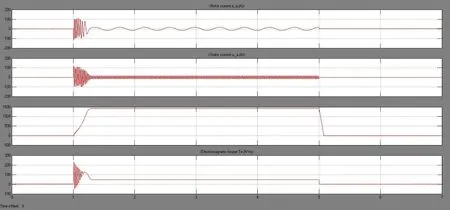
图4 电动葫芦上升过程仿真模型中电机模块的输出

图5 电动葫芦上升过程有功功率和无功功率仿真结果
图6从上到下显示的依次是下降重物过程中电机的定子A相电流、转子a相电流、转速和电磁转矩。从图6可以看出,电动机的稳定运行速度略大于同步速,这是回馈制动的一个特点;而且速度的稳定值是一个负值,体现了下降过程的转速与上升过程转速相反的特点。图7显示的是电动葫芦下降重物过程中电机从电网获得的有功功率(实线)和无功功率(虚线)。可以看出:在启动开始阶段,有功功率为正值,随后转变为负值而且稳定值保持为一个稳定的负值,这与第2节对电动葫芦下降重物过程中工作特性的分析一致,即:电机先是处于反向电动状态从电网吸收电能,当转速超过同步速时则工作在回馈制动状态,因此向电网回馈电能。
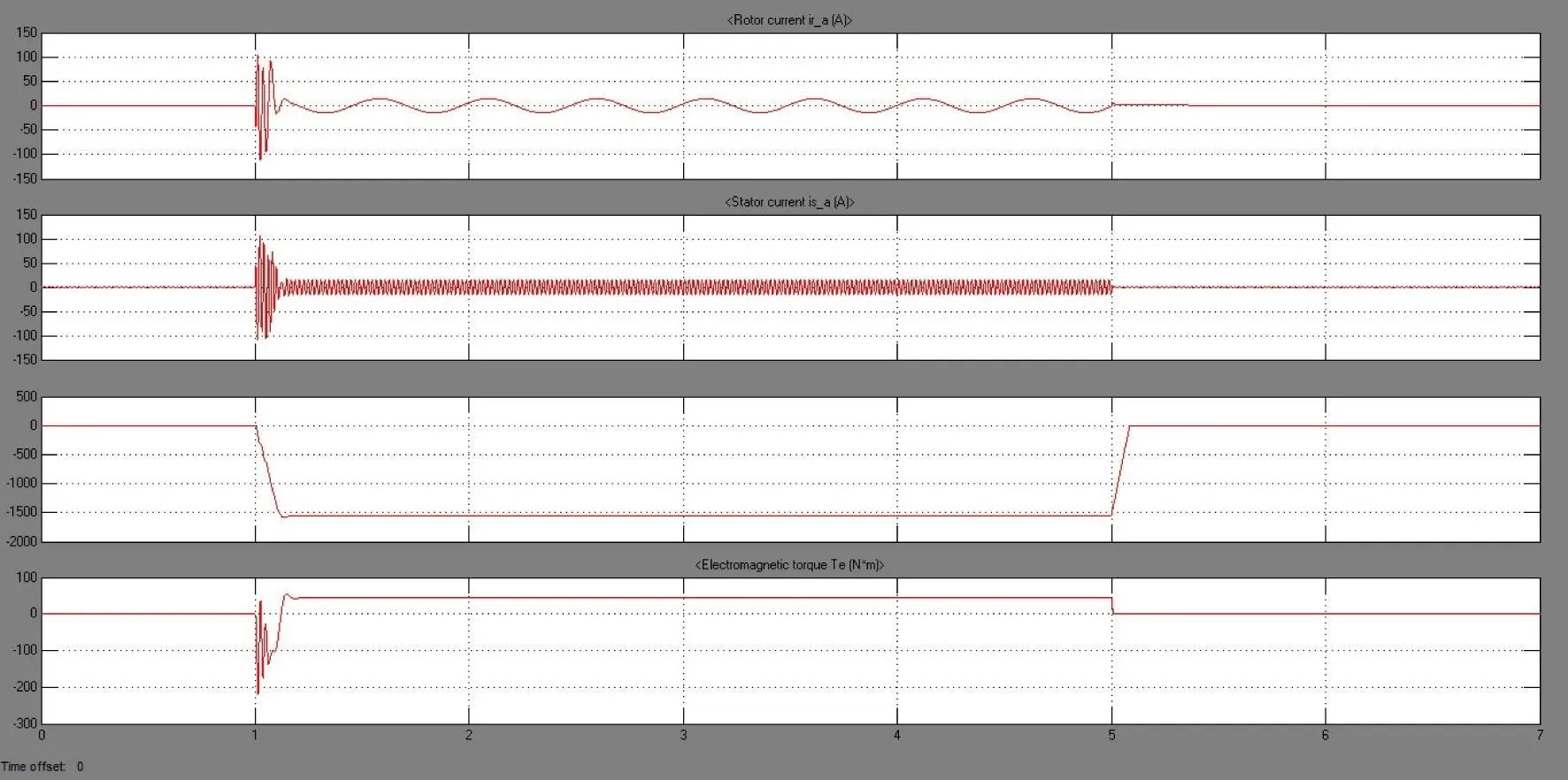
图6 电动葫芦下降过程仿真模型中电机模块的输出
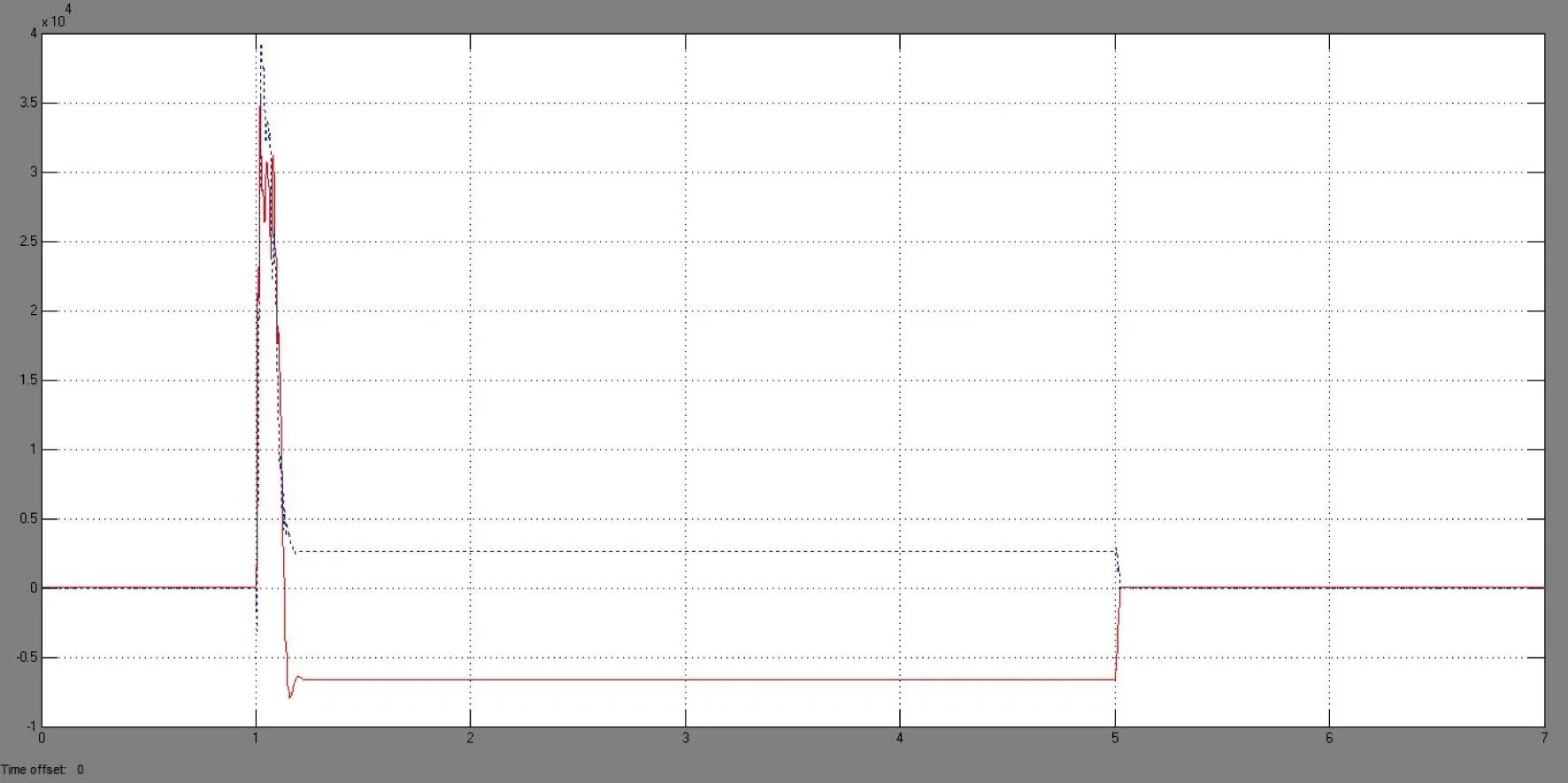
图7 电动葫芦下降过程有功功率和无功功率仿真结果
5.2两种影响因素的能效仿真
利用5.1节建立的能效仿真模型定量地探究负载和行程这两种因素对能效的影响规律。
在负载与能效系数关系仿真中,设定仿真模型的起升和下降过程均为12s,电机模型的负载转矩分别依据负载为空载、2t、5t、8t、13t、15t和16t来确定。结果如图8所示, 图中横坐标为负载,纵坐标为能效系数。在负载与行程关系仿真中,设定电动葫芦负载恒定为8t,通过改变起降时间控制起降高度,起降时间分别设为4s,8s,12s,16s,20s,30s,40s,50s。结果如图9所示, 图中横坐标为行程,纵坐标为能效系数。

图8 CD1 16-9型电动葫芦负载与能效系数关系(仿真)

图9 CD1 16-9型电动葫芦行程与能效系数关系(仿真)
由图8可以看出CD116-9型钢丝绳电动葫芦的能效系数随负载变化的规律:随着负载的增加,电动葫芦能效系数先逐渐减小,即电动葫芦对电能的利用效率逐渐升高;当负载超过50%额定起重量后,能效系数随着载荷的增加变动较小,能效系数的变化逐渐趋于稳定。
图9反映了CD116-9型钢丝绳电动葫芦的能效系数随行程变化的规律:随着行程的增加,电动葫芦能效系数先逐渐减小;当行程超过25%的起升高度后,随着行程的增加,能效系数变动较小,逐渐趋于某一稳定值。
6电动葫芦能效测试实验
为了对上述的理论分析和仿真结果进行验证,采用国家桥门式起重机械产品质量监督检验中心的电动葫芦多功能试验台进行了能效测试实验,试验台的组成如图10所示。借助该实验台,可以测量电动葫芦起降重物的实际运行速度、运行时间,以及起升重物和下降重物阶段输入电动葫芦的电流有效值、电压有效值、有功功率、无功功率、功率因数。

图10 电动葫芦多功能实验台的组成
实验中采用的电动葫芦能效系数的计算公式为:
(6)
式中:重物质量为m,重力加速度g=9.8m/s2,提升重物过程中三相交流电电压有效值为Ui1(i=1,2,3),电流有效值为Ii1(i=1,2,3),功率因数cosφ1,下降重物过程中三相交流电电压有效值为Ui2(i=1,2,3),电流有效值为Ii2(i=1,2,3),功率因数cosφ2,上升和下降时间均为t。
在负载与能效系数关系实验中,设定起升12s,下降12s,考虑到电动葫芦的持续负载率要求,在起降之间暂停10s[4]。负载分别为空载、2t、5t、8t、13t、15t和16t,每组实验重复3次。每种负载下的能效系数取该负载下3次实验结果的平均值,将实验结果和仿真结果做在同一张图11中,其中线1为仿真结果曲线,线2为实验结果曲线。在行程与能效系数关系实验中,电动葫芦负载恒定为8t,通过改变起升、下降的时间控制起降高度。起升时间分别设为4s,8s,12s,16s和20s,每组实验的起降时间相同,起降之间的间隔时间设为10s,每组实验重复3次。同样每种行程下的能效系数取该行程下3次实验结果的平均值,将实验结果和仿真结果做在同一张图12中,其中线1为仿真结果曲线,线2为实验结果曲线。
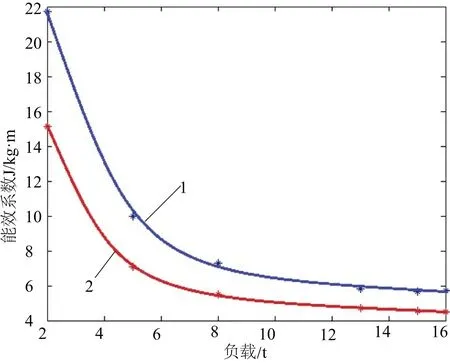
图11 CD1 16-9型电动葫芦负载与能效系数关系(仿真与实验)

图12 CD1 16-9型电动葫芦行程与能效系数关系(仿真与实验)

从图12可以看出如下一些特点:1) 仿真结果值均高于实验结果值。其原因与图11中出现的仿真结果高于实验结果现象的原因是相同的。2) 在行程较小时,仿真值与实验值偏差较大;随着行程的增加,仿真结果值与实验结果值越来越接近。出现这个现象的原因是,由于起升重物时启动瞬间的冲击功率、下降重物时正的有功功率以及加速阶段的速度小于稳定速度这些现象的存在,使得仿真结果大于实验结果。当行程较小时,这些效应的影响很明显,因此在图12中可以看出在行程较小时,仿真的能效系数远高于实验的能效系数。而随着运行时间的增长,上述效应在整个运行过程中所占的比例越来越小,对能效系数的影响逐渐变得不再明显,这时仿真结果与实验结果就比较接近。
7结论
对电动葫芦的能效进行了建模、仿真以及实验研究,为电动葫芦的能效测试方法研究打下了基础。主要结论如下:
1) 电动葫芦在一个完整起降循环过程中能量的流动方向具有如下的特点:电动葫芦在起升重物时,从电网吸收电能;下降重物时,向电网回馈电能。电动葫芦在空钩起降的整个循环中,始终从电网吸收电能。根据这一特点,提出了更适合于评价电动葫芦能量利用效率的评价指标——能效系数。
2) 建立了计算电动葫芦能效系数的数学模型。并以数学模型为基础,在MATLAB/Simulink中建立相应的仿真模型,该模型具有较好的实用性,为理论研究电动葫芦的能效提供了一种手段。
3) 通过仿真与实验相结合,归纳出了电动葫芦的能效系数与负载和行程的关系:随着负载的增加,电动葫芦能效系数先逐渐减小;当负载超过50%额定起重量后,能效系数的变化逐渐趋于稳定。随着行程的增加,电动葫芦能效系数先逐渐减小;当行程超过25%的起升高度后,随着行程的增加,能效系数变动较小,逐渐趋于某一稳定值。
参考文献:
[1] 宫本智. 葫芦式起重机[M]. 天津: 天津科学技术出版社, 2009.
[2]刘锦波,张承慧. 电机与拖动 [M]. 北京: 清华大学出版社, 2006.
[3]辜承林,陈乔夫,熊永前. 电机学[M]. 武汉: 华中科技大学出版社, 2005.
[4]JB/T 9008.4-2004. 钢丝绳电动葫芦试验方法[S]. 全国起重机械标准化技术委员会, 2004.


收稿日期:2014-01-10
中图分类号:Tp11+.3;TP391.9
文献标志码:B
文章编号:1671-5276(2015)04-0080-06
作者简介:秦伟皓(1986-),男,河南南阳人,硕士研究生,主要研究方向为机械电子。
