极小转弯半径电动葫芦小车的研究设计
2016-09-19湖北三六重工有限公司周冬青
湖北三六重工有限公司 周冬青
极小转弯半径电动葫芦小车的研究设计
湖北三六重工有限公司周冬青
针对企业现有电动葫芦转弯半径相对较大,一般在1~10m,改进电动葫芦小车结构,在小车与葫芦本体连接处增加旋转装置,使电动葫芦转弯半径可控制在200~1000mm,在受限空间上能转弯运行,扩大电动葫芦使用范围,提高工作效率,最终给企业带来经济效益,供有关企业和专业技术人员参考。
电动葫芦小车;转弯半径;旋转装置
现有的电动葫芦在转弯时,要求轨道的转弯半径都很大,一般在1~10m,甚至超过10cm,这是由电动葫芦结构决定的。在现实情况中,由于受空间位置限制及其他特殊要求,要求电动葫芦运行转弯半径很小,特别是在电力、化工等企业。企业在难以实现小转弯半径的情况下,解决方法往往是在起吊设备转弯处垂直各铺设一条直轨道,另各装一台电动葫芦进行转运,大大增加了设备成本并降低了工作效率。为了解决电动葫芦能在小转弯半径轨道上连续运行,使电动葫芦使用范围扩大,并在受限空间上布置小转弯轨道,减少所需电动葫芦数量,节约企业设备成本,提高工作效率,主要从电动葫芦小车的结构上进行改进,设计出适合小转弯半径的电动葫芦小车。
1 分析影响电动葫芦转弯半径的因素及解决方案
1.1现有电动葫芦结构
现有的电动葫芦主要分为两大部分,上部分是电动葫芦行走部分,称电动葫芦小车,下部分是电动葫芦起吊部分,也是电动葫芦的本体部分。电动葫芦小车结构主要由电动机、减速器、车轮、主动走轮墙板、被动走轮墙板组成,电动葫芦小车与本体部分采用销轴进行连接,如图1所示。
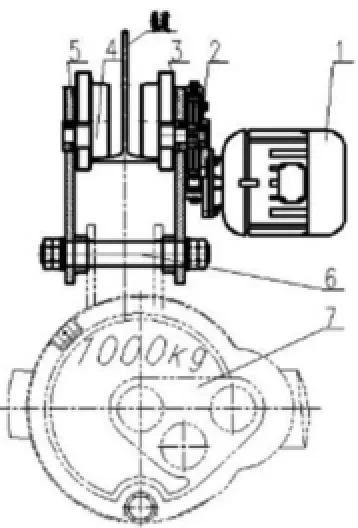
图1 现有电动葫芦小车结构图
1.2影响电动葫芦转弯半径的因素
电动葫芦的本体结构和起吊吨位及扬程有关,但对一定起吊吨位和扬程的葫芦本体体积变化影响不大,即在一定起吊吨位和扬程的情况下,电动葫芦本体结构变化不大,通过改变其结构对改变转弯半径不能起较大作用。电动葫芦小车结构变数较大,它的结构直接影响其转弯半径。单台CD型小车是四车轮小车,即单边小车墙板上安装有两个车轮,主动车轮和被动车轮。由于四车轮小车从一直线轨道运行进入一弧形轨道,并能顺利通过,轨道的半径受轮缘卡轨条件限制,因此轮缘与轨道之间应有适当的间隙,车轮才能转弯,通过轨道如图2所示,其转弯半径根据经验公式计算:

式中:Rmin─最小转弯半径mm;
K─两轮中心距mm;
D─车轮的工作直径mm;
Dy─车轮轮缘直径mm;
B─两车轮轮缘之间的距离mm;
M─车轮轨道宽度mm。
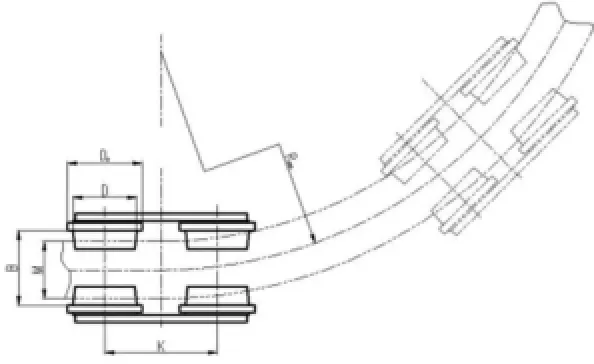
图2 车轮通过圆弧轨道示意图
从公式中分析,(B-M)为两轮缘与车轮轨道的两边间隙和,一般设计为4~8mm,超过范围值则会在直线运行时产生偏摆;D 和Dy两个参数是车轮的尺寸,与负载大小有关,一般变化不大;变化最大的是两轮中心距K,两轮中心距离越小,最小转弯半径越小,但两轮中心距要大于车轮直径才能转弯,否则在转弯时,两轮会发生干涉。
1.3现有的解决方案
根据因素分析,目前解决减小转弯半径的方案有如下几种:第一,将两轮中心距在设计时设计到最小,甚至将四车轮小车改装成两车轮小车,即单边小车墙板上安装有一个车轮,这样可以减小电动葫芦的转弯半径,但电动葫芦运行平稳性较差,容易侧翻。第二,加大车轮轮缘与轨道的间隙,这会使小车在直线轨道上运行时产生偏摆,且间隙的调整只能是4~8mm。第三,将承载梁设计成能绕铅垂轴线转动,这种方法改变的不是小车,而是小车轨道,会使承载梁钢结构附加弯矩,车轮受力也不均匀。
当CD型电动葫芦小车在两车轮中心距最小时,运行过程中遇到小转弯轨道能继续运行,即也要让两对小车车轮运行的轨迹不受电动葫芦主体的限制,设计出电动葫芦小车与电动葫芦主体之间能相对转动,这样不论电动葫芦本体多大,都不会影响转弯半径,可称这种电动葫芦小车为极小转弯半径的电动葫芦小车。
2 极小转弯半径电动葫芦小车结构设计
2.1小车结构设计
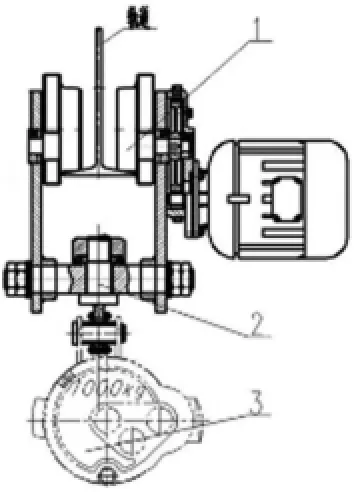
图3 极小转弯半径电动葫芦整体结构简图
现有电动葫芦小车如图1所示,采用销轴6将电动葫芦本体与小车连接,这种结构小车和葫芦本体是不能发生相对转动的。极小转弯半径的电动葫芦小车,在CD型电动葫芦小车原有结构上加了一个旋转装置,如图3所示。极小转弯半径的电动葫芦在电动葫芦本体与小车连接时采用的是旋转装置,旋转装置结构如图4所示,主要由连接横梁、小车旋转平衡吊轴、推力球轴承、螺母、卡板、关节轴承、连接板、轴套等组成,并在小车墙板上增加水平导向轮装置。在旋转装置中,小车旋转平衡吊轴上部穿过连接横梁,并在其上装有推力球轴承,用螺母连接,再用卡板固定。小车旋转平衡吊轴下面吊的是电动葫芦本体,所以是要受轴向力的,用推力球轴承使小车旋转平衡,吊轴可以绕其轴线转动并能进行调心。小车旋转平衡吊轴下部通过关节轴承和销轴连接,关节轴承是一种特殊结构的滑动轴承,其主要由一个有外球面的内圈和一个有内球面的外圈组成,能承受较大的负荷,可以承受径向载荷、轴向载荷或径向、轴向同时存在的联合负荷。由于关节轴承表面为球面形,可在一定角度范围内作调心运动,在销轴与关节轴承不同心度较大时,仍能正常工作,同时调节钢丝绳电动葫芦主体与小车之间受力平衡。
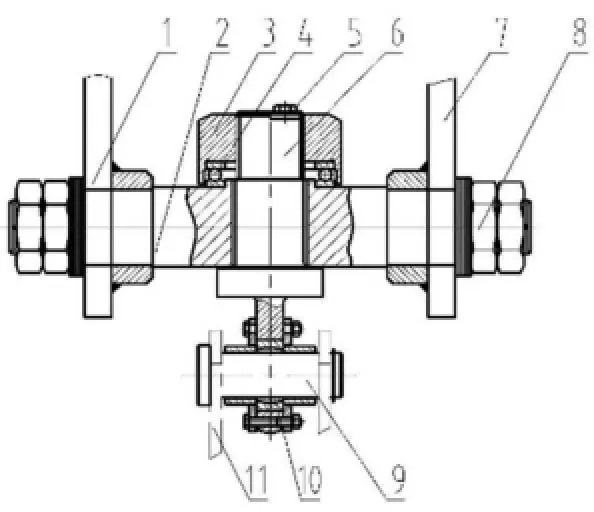
图4 旋转装置结构
2.2旋转装置与小车、葫芦本体的连接
旋转装置中的连接横梁将小车主动走轮墙板和被动走轮墙板连接起来,连接横梁两端用双螺母将其锁紧,并在连接横梁两端丝杆头处安装开口销,防止其松动脱落。旋转装置中的销轴穿过轴套,关节轴承将电动葫芦主体两架板连接,并用卡簧固定,利用关节轴承调节受力平衡。
2.3水平导向轮安装
极小转弯半径的电动葫芦小车在小车主、被动走轮墙板上和贴近小车运行轨道的翼缘处各安装两个水平导向轮,导向轮在小车转弯时除起导向作用外,还可保护小车走轮内侧轮缘不与轨道产生挤压摩擦而受损。

图5 水平导向轮安装示意图
3 改进后的电动葫芦小车工作情况及优点
极小转弯半径的电动葫芦小车,通过小车旋转装置将电动葫芦本体与小车连接为一个整体,小车旋转平衡吊轴与连接横梁之间通过推力球轴承的作用,使小车旋转平衡吊轴可360°自由旋转,在水平方向上,由于小车上部整体与小车旋转平衡吊轴之间处于一个360°可旋转的状态,电动葫芦主体也就与每一对小车车轮处于360°可旋转的状态,它在运行时只受限于两对小车车轮之间的距离,一般两对小车车轮之间的距离在200~1000mm,小转弯轨道半径可控制在200~1000mm,两对小车车轮下面都采用旋转装置,在转弯时,各处于自己的运行轨迹上,不受限于连接的葫芦主体,从而不会出现转弯时卡死的情况。
改进后的极小转弯半径的电动葫芦小车有三大优点:①其轨道弧形处转弯半径可控制在200~1000mm,不受空间位置限制影响;②主、被动小车都采用旋转装置,使小车通过小转弯轨道时不会出现卡死的情况;③在小车主、被动走轮墙板上增加了水平导向轮,可减少小车走轮内轮缘与轨道翼缘的摩擦,保护走轮,防止受损。
[1]张志新.电动葫芦特殊曲率半径小车[J].科技创新与品牌,2012.08.
[2]徐文娟.高扬程电动葫芦改造设计[J].咸宁学院学报,2011.12.
[3]张云.单轨小车转弯问题的分析和计算[J].机械设计与制造,1999.12.
周冬青,1964年12月出生,湖北嘉鱼人,研究生,高级工程师,研究方向:起重运输机械。
