北斗D1导航电文冗余法误码纠错研究
2016-01-20王扬钧刘文祥孙广富
王扬钧,刘文祥,雍 玲,孙广富
(国防科学技术大学电子科学与工程学院卫星导航研发中心,湖南 长沙 410073)
北斗D1导航电文冗余法误码纠错研究
王扬钧,刘文祥,雍玲,孙广富
(国防科学技术大学电子科学与工程学院卫星导航研发中心,湖南 长沙 410073)
摘要:在弱信号、遮挡等恶劣环境下,低载噪比的导航电文中含有大量的误码,常用的编码技术不能有效地纠正子帧中多比特位上的误码。本文提出了一种冗余法误码纠错方法,该方法依据少数服从多数的判别准则,选取不同数目的子帧样本,对同组子帧样本的各帧上相同比特位上的码元逐一进行比对的试验方式进行纠错试验。分析了不同载噪比、不同子帧样本数条件下进行冗余法纠错能够将各子帧中全部误码正确纠正的概率,例如,在子帧样本数为5,载噪比30 dBHz时,整个子帧上的误码被全部纠正的概率高达96.64%时,纠错处理后的误码率比理论误码率降低2个数量级。
关键词:弱信号;低载噪比;误码;冗余纠错
doi:10.13442/j.gnss.1008-9268.2015.02.007
中图分类号:P228.4
文献标志码:: A
文章编号:: 1008-9268(2015)02-0031-06
收稿日期:2015-02-04
作者简介
Abstract:In weak signal, blocking and other harsh environment, the low SNR navigation message contains a lot of error codes; Normal code technology cannot effectively correct the errors more than one bit in the frame. This paper proposes a redundancy method of error correction. The method that relies on the rule which is the minority obey to the majority chooses different number of frames and compare the code in the same bit of one frame in the frame samples. Under different signal noise rate, this paper analyses the probability of all errors corrected by the redundancy method under different number of frame samples and the effect of depressing the error rate. For example, when the number of frame samples is 5 and the SNR is 30dBHz, the rate of all error codes in one frame corrected is up to 96.64% and the SNR is about 1% of the original one after the redundancy method.
0引言
随着北斗二代卫星系统的逐渐完善,我国的北斗系统将成为继美国GPS、俄罗斯GLONASS和欧洲Galileo之后的又一个能够为用户提供全球全天候的卫星导航定位服务的国家。在卫星导航定位过程中,经常会遇到一些有较强干扰源的路段,比如射频干扰、多路径干扰、密林或建筑物遮挡等。处在这些多种因素干扰的环境下,导航型接收机是否还具有导航能力,定位的结果是否具有连续性、有效性和可靠性,是每个导航型接收机使用者非常关心的问题。
卫星导航系统中正确的导航电文是实现定位解算的基础。导航电文中含有时钟信息、卫星运行轨道、电离层延迟等用于定位的重要信息。在遮挡、干扰和弱信号或高动态等恶劣环境下,接收机接收到的信号的载噪比衰减可能会达到10 ~35 dB[1],造成大量电文错误或被丢弃,进而可能导致某些定位参数数值的改变或缺失,使可用导航电文不足,导致定位结果的错误或无法进行定位解算,影响导航定位系统的定位性能及连续性。为应对传输过程中可能出现的导航电文误码的情况,传统的电文误码识别[2]与纠错方法对电文误码的识别和纠错能力有限,存在不能将能够纠正的误码进行识别和纠正的可能[3-4]。
本文基于北斗D1卫星导航电文,提出一种“冗余法”电文误码纠错方法,该方法采用少数服从多数的判别准则,选取不同数目的子帧样本进行试验,对同一组子帧样本各子帧上的导航电文相同比特位上的码元逐一进行比对,纠正各子帧上相同位置上的电文误码,提升导航电文的可用性。
本文第一部分分析了北斗D1导航电文结构及不同载噪比条件下的理论误码率;第二部分分析了冗余法对单一比特位上误码的纠错原理,并推导了相应的概率计算公式,同时推导了各子帧上全部误码被正确纠正的概率公式;第三部分首先对单一比特位上误码及子帧上全部误码被正确纠正的理论概率进行了计算,其次利用仿真实验,得出试验结果,计算出相应的试验概率,与理论概率进行对比分析,验证本文提出方法的正确性。
1理论误码率计算
1.1 导航电文结构
根据速率和结构不同,北斗导航电文分为D1导航电文和D2导航电文,D1导航电文包含有本卫星基本导航信息、全部卫星历书及与其它系统时间同步信息;D2导航电文包含北斗系统的差分及完好性信息和格网点电离层信息。D1导航电文简化结构[3]如图1所示:
联系人: 王扬钧 E-mail: wangyangjun9955@163.com
图1中,Di(j)表示导航信息位,i为数据位,取值为1 ~11,j是分组号,取值为1或2;Jm(n)表示校验位,m取值为1 ~4,n取值1或2.

图1北斗D1导航电文简化结构
现代化的卫星导航系统如GPS系统、Galileo系统和我国的北斗系统在信号体制上新增加了很多创新技术,导航电文设计引入了新的检错编码和纠错编码方案[6]。GPS系统L2C和L5信号引入了CNAV电文格式,L1C信号引入了CNAV-2电文格式,典型现代化的导航电文信号结构参数[7]如表1所示。
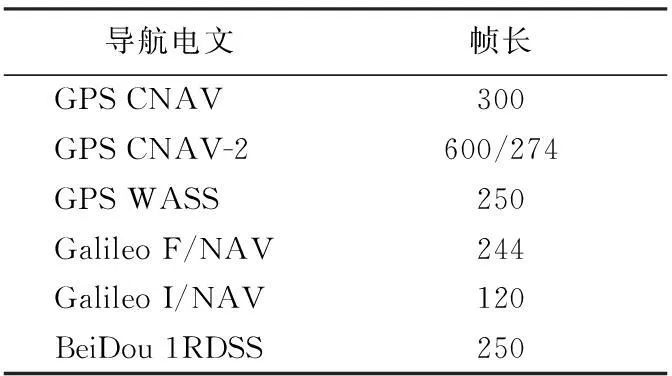
表1 现代化卫星导航电文结构参数
1.2 不同载噪比理论误码率公式及结果
北斗D1导航电文由超帧、主帧和子帧组成。每个主帧为1 500 bit,历时30 s;每个主帧由5个子帧组成,每个子帧为300 bit,历时6 s;每个子帧由10个字组成,每个字为30 bit,历时0.6 s.北斗D1导航电文属于BPSK信号[8],差错概率Pe为
(1)
式中: erfc为互补误差函数; Eb为一个比特位的能量; N0为噪声功密度,它可以看做是每赫兹的噪声功率。错误概率只取决于比值Eb/N0,而与信号和噪声的其他细节特征无关。Eb/N0与C/N0之间通过导航数据长度相关联,tb为20ms(20×10-3s)[9]。其关系式为
(2)
(3)
(4)
式中: SNR为载噪比; Pe为理论误码率。如图2示出了不同载噪比条件下的理论误码率。
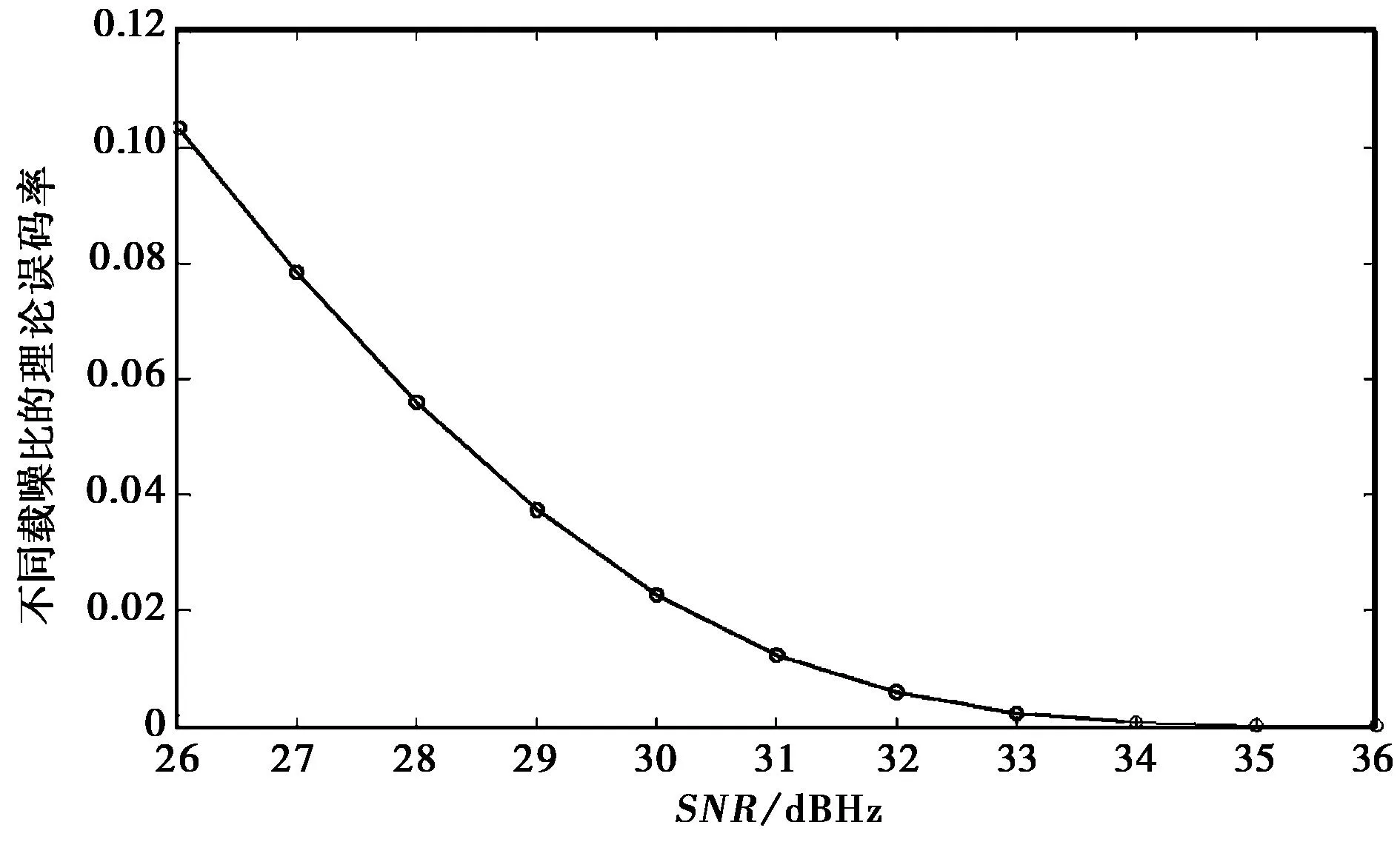
图2 不同载噪比的理论误码率
2D1导航电文误码冗余法纠错原理
一套星历参数的有效期一般是以参考时间t为中心的4 h之内,而超过此有效时段的星历经常被认为是过期且无效的。卫星播发的第1子帧、第2子帧和第3子帧的内容通常每两个小时更新一次,并且通常发生在整小时交接处,此时,可以通过本文的方法对更新前后或者同一批播发的各子帧上保持不变的信息(如星期数WN,帧同步码Pre等)进行冗余法纠错;同时,即使高载噪比的导航电文在恶劣环境下也会产生较多误码,所以也可以采取在恶劣环境下使用接收机对同一时间播发的导航电文进行多次测量比对,以期降低其误码率,提升各帧导航电文的可用性。
2.1 单一比特位误码纠错原理
首先,考虑采用冗余法对单一比特位上误码的纠错情况。假设0为正确码元,1为误码,所取子帧样本数为n,若0的出现次数比1的出现次数至少多1,则可以认为此时该比特位上的码元为0,也即能正确地将误码1纠正为0;否则,则视为不能正确纠正[10]。
具体例子如表2所示,分别代表了子帧样本总数为1~5情况下,单一比特位可能出现的码元分布结果及冗余法能否正确纠正误码的情况。
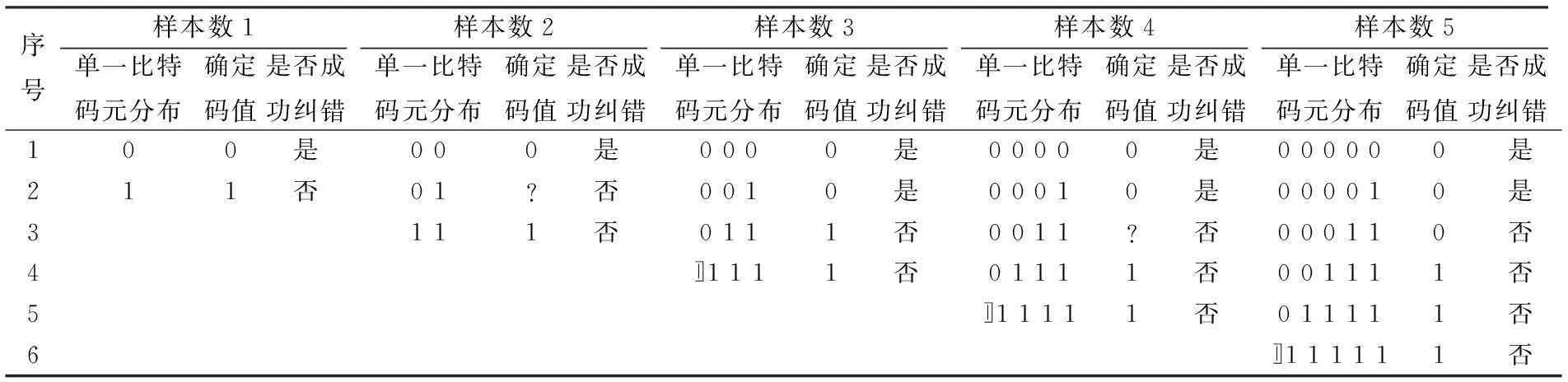
表2 子帧样本为1~5时单一比特位码元分布及误码纠正情况
通过分析发现,在子帧样本数为1,2时,只有当单一比特位上的码元全为0(正确码)时,才能被视为正确纠正,所以说此种情况对降低导航电文误码率没有任何效果。
2.2 冗余法误码纠错概率公式
根据2.1节中的冗余法纠错原理和实例分析,假设某载噪比所对应的理论误码率为p1,则可得出:
1) 子帧样本总数为1时,单一比特位上的误码能被正确纠正的理论概率为

(5)
2) 子帧样本总数为2时,单一比特位上的误码能被正确纠正的理论概率为

(6)
3) 子帧样本总数为3时,单一比特位上的误码能被正确纠正的理论概率为

(7)
4) 子帧样本总数为4时,单一比特位上的误码能被正确纠正的理论概率为

(8)
5) 子帧样本总数为5时,单一比特位上的误码能被正确纠正的理论概率为

(9)
则样本总数为n时,单一比特位上的误码不能被正确纠正的理论概率P0,可分为以下两种情况进行计算:
1) n为偶数时:
(10)
2) n为奇数时:
(11)
由此可得:假设子帧的总比特数为m,各比特位上的码元是相互独立的,根据独立事件的乘法原理,所取子帧样本总数为n时,根据冗余法纠错原理,则单一子帧上所有比特位上的误码全部能够被正确纠正的概率为
PAllRight=(1-P0)m.
(12)
3试验验证及结果分析
3.1 试验方法
为了实际验证本文所提出的冗余法对北斗D1导航电文误码的纠错性能,根据第1、2部分的分析推导,本文主要对低载噪比(26~36 dBHz)条件下的导航电文进行试验研究:
首先将子帧上的300比特码元视为互不相关的独立码元,计算其在不同的载噪比条件下,子帧的所有比特位上可能存在的误码能够全部被正确纠正的理论概率及仿真试验概率。
为了使试验更接近实际情况,利用Matlab程序模拟产生109组子帧,各组子帧为300比特,且全部为正确码元0的电文,再根据不同载噪比所对应的理论误码率,计算出3×1011比特电文中应含有的理论误码数,将不同理论误码数的误码随机加入到3×1011比特电文中去,最后得到含有误码的符合实际情况的模拟电文。
3.2 结果分析
3.2.1子帧样本数为n时单一比特位上误码被正确纠正的概率
以下是不同载噪比条件下,子帧样本数为1,2,3,4,5时单一比特位上的误码能够被正确纠正的理论概率,如图3所示。
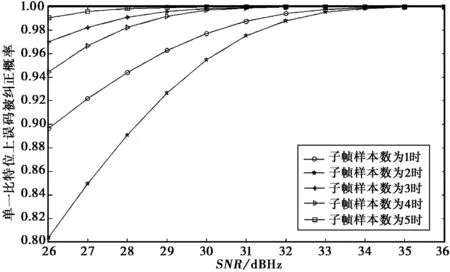
图3 子帧样本数为1~5时单一比特位上误码被纠正概率图
3.2.2子帧样本数为n时子帧上全部误码被正确纠正概率
试验验证不同载噪比条件下子帧样本数为1,2,3,4,5时单一比特位上的误码被纠正的概率后,接下来研究的是子帧上的所有比特位上的误码能够全部被正确纠正的概率。以下是不同载噪比条件下的相关试验结果,如图4所示。
图4中按照从左上角至右下角的顺序,依次表示的是子帧样本数为5,3,4,1,2时的子帧上全部误码能被正确纠正的概率值,每条粗线其实各为两条细线的重合线,分别代表了在同一子帧样本数下的理论概率和试验概率。
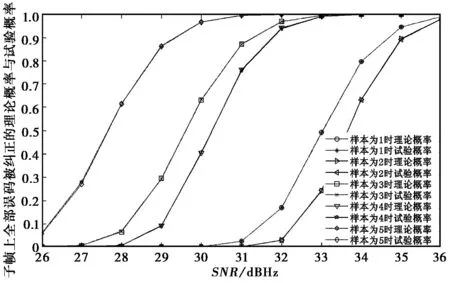
图4 子帧样本数为1~5时子帧上全部误码被纠正的理论概率与试验概率
图3和图4表明:
1) 各曲线的理论概率和试验概率基本重合,这表明在相同的子帧样本总数和载噪比条件下,试验仿真概率与理论推导所计算的概率基本相同,说明本文试验方法的正确性,试验结果可信;
2) 相同子帧样本总数条件下,随着载噪比的增大,子帧上的所有误码能被全部正确纠正的概率逐渐增大;
3) 对于较低载噪比而言,例如26~32 dBHz,随着所取子帧样本总数的增大,子帧上的所有误码能被全部正确纠正的概率逐渐增大,增大趋势比较明显,这表明在低载噪比情况下,使用较高的子帧样本总数,能提升子帧上误码被全部正确纠正的概率;
4) 对于较高载噪比而言,例如33~36 dBHz,随着所取子帧样本总数的增大,子帧上的所有误码能被全部正确纠正的概率也逐渐增大,但增大趋势渐缓;这表明对高载噪比来说,使用较少的子帧样本总数,就能够获得较高的子帧上的全部误码被正确纠正的概率。
5) 由图 4可知,在相同载噪比情况下,子帧的样本总数为奇数时,能正确纠正各子帧上所有误码的成功率要略高于相邻的子帧样本总数为偶数时的概率;例如,子帧样本总数为1时,各子帧上全部误码被正确纠正的概率略高于子帧样本总数为2时的概率;子帧样本总数为3、5时的误码全部被纠正的概率略高于子帧样本总数为4时的概率;这是因为子帧样本数为偶数时,存在正确码元0和误码1数目相等的情形,会导致无法根据判别准则进行判定的情况出现,所以在使用冗余法进行误码纠正时,尽量使子帧样本总数为奇数。
3.2.3冗余纠正后误码率结果
采用不同的子帧样本数进行冗余纠正后,能够降低不同载噪比的误码率,图5表示的是理论误码率和子帧样本数为1,2,3,4,5处理后的误码率。
图5表明:
1) 不同载噪比情况下,采用冗余法纠错后,误码率均比理论误码率有所降低,而且在子帧样本数较大时,误码率的降低效果比较明显。例如,子帧样本数为5时,经冗余法处理后,各载噪比的误码率比原始的理论误码率降低大约两个数量级。
2) 当子帧样本数为1,2时,实验处理后的误码率与原始理论误码率值基本相同,这是由于本文采用的是少数服从多数的判别准则,只有当相互比较的比特位上全为正确码元0时,才能被视为正确纠正,也即是没有纠正误码(如表3所示),故此时误码率没有改善;当子帧样本数为3,4,5时,纠错后的误码率显著降低,且子帧样本数为3时的误码率降低幅度比子帧样本数为4时的大,原因与3.2.2节中的5)所阐述的相同。该结果表明,在条件允许的情况下,采用较多次数的子帧样本数为奇数的冗余纠错对降低误码率的效果更明显。

图 5 理论误码率和子帧样本数为1,2,3,4,5处理后的误码率对比图
4结论
本文根据北斗D1导航电文的特点,提出了根据不同的子帧样本总数,采用冗余法纠正导航电文中误码的方法。理论推导及试验结果表明,该方法不仅能够纠正电文中多比特位上的误码,弥补了导航电文常用编译码纠错方法(如BCH(15,11,1))只能纠正单一比特位或少量比特位上误码的缺陷,还能够纠正各帧导航电文上的全部误码,也能不同程度地降低导航电文的误码率;同时本文给出了对含大量误码的导航电文的冗余纠正策略。可以将本方法运用到解决弱信号环境下导航定位的准确性、连续性等问题中去。
参考文献
[1] WOLF J K, FREDRICKSON L J, ANDREW V. Research in mathematics and computer science: calculation of the probability of undetected error for certain error detection codes. Phase 11 ADA-210302 [R]. 1989.
[2] 钱宏,李广侠,常 江.高性能准循环低密度奇偶校验码在导航信号中的应用[J].计算机应用,2011.31(4):3-4.
[3] VITERBI A J, WOLF J K, FREDRICKSON L J,etal. Research in mathematics and computer science: calculation of the probability of undetected error for certain error detection codes. Phase 2, ADA-238234 [R]. 1991.
[4] 谢钢.GPS原理与接收机设计[M]. 北京:电子工业出版社,2009.
[5] 杨杰,朱建锋,安建平.无线传输中的循环冗余校验码纠错应用扩展[J].北京理工大学学报,2005,25(8):726-729.
[6] 杨锋,赵路,孙公航.个人手持系统利用循环冗余校验进行纠错的方法:中国,CN200510004887. 2[P]. 2006-08-09.
[7] 陈金平,王梦丽,钱曙光.现代化GNSS导航电文设计分析[J].电子与信息学报,2011,33(1):211-217.
[8] 黎雨露,沈兵.一种RNSS中频信号快速捕获算法[J].武汉理工大学学报, 2009.
[9] (美)普罗基斯.数字通信[M].4 ed. 张力军等译.北京:电子工业出版社,2003.
[10]仇佩亮.信息论与编码[M].北京:高等教育出版社,2003.
王扬钧(1991-),男,硕士生,主要研究方向为卫星导航信息处理技术。
刘文祥(1981-),男,讲师,主要研究方向为星基导航与定位技术。
雍玲(1973-),女,副教授,主要研究方向为星基导航与定位技术。
孙广富(1970-),男,博士生导师,主要研究方向为星基导航与定位技术。
The Research on the Redundancy Method Correcting Error
Codes of BeiDou D1 Navigation Message
WANG Yangjun,LIU Wenxiang,YONG Ling,SUN Guangfu
(SchoolofElectronicScienceandEngineering,NationalUniversityof
DefenseandTechnology,Changsha410073,China)
Key words: Weak signal; low SNR; error codes; redundancy error correction
