一种改进的功图量油技术的研究与应用
2015-12-31彭健李董波徐志强包梦
彭健 李董波 徐志强 包梦


摘要:功图量油技术主要通过示功图来实现对油井产液量的自动测量。针对目前量油技术的一些不足,提出一些改进,通过梯度法对原始功图载荷位移数据进行计算,确定功图的拐点,再通过同心椭圆逼近示功图的方法来筛选出油井的凡尔开闭点,进而得到油井泵的有效冲程来计算油井的产量。本文所研究的功图量油技术在手持android终端量油系统得到了实现,并且在实际应用中得到了验证,目前在江苏油田得到了广泛应用。
关键词:梯度;冲程;功图;产液量
中图分类号:TE933 文献标识码:A
1引言
传统的油井计量主要通过大罐量油、计量站量油、井口称重量油等方式,这些计量方式不仅误差大,而且需要消耗极大的人力物力。功图量油技术是一种变人工量油为自动求产的方法,与传统的计量方式相比简化了计量流程、集输流程,提高了油田的实时生产效率,对逐步实现石油开采的自动化、信息化、智能化具有重要意义。本文对现有功图量油技术进行了改进,并在Android手持终端量油系统中得到了实现,目前已在江苏油田得到了广泛应用。
2功图量油的基本原理
2.1功图数据来源
示功图数据是功图法的基础,功图量油技术就是利用自动化技术测量得到载荷随位移变化的二维关系曲线,在此基础上通过计算机智能算法来求出油井产液量。功图数据的采集主要是通过安装在油井抽油杆上的示功仪来完成的,示功仪将载荷传感器和加速度传感器集成在一个系统,示功仪通过主控芯片,控制着加速度传感器和载荷传感器对抽油机的载荷和加速度进行采集,采集的加速度和载荷信号经过数据处理以后再次输入到主控芯片,以后存入存储器中。
2.2产液量的计算
抽油机井的功图量油产液量是指抽油杆运行有效冲程的长度所汲取的液量。在正常工矿条件下,抽油机井的单日油产液量计算表达为:
式中:V为功图一天的理论产液量;D为抽油泵的直径,单位为mm;N为抽油机的冲次,单位为次/min;Seff“为抽油泵有效冲程长度,单位为m。
由以上分析可知,计算产液量的关键是柱塞有效冲程的确定。
3改进的功图量油技术研究
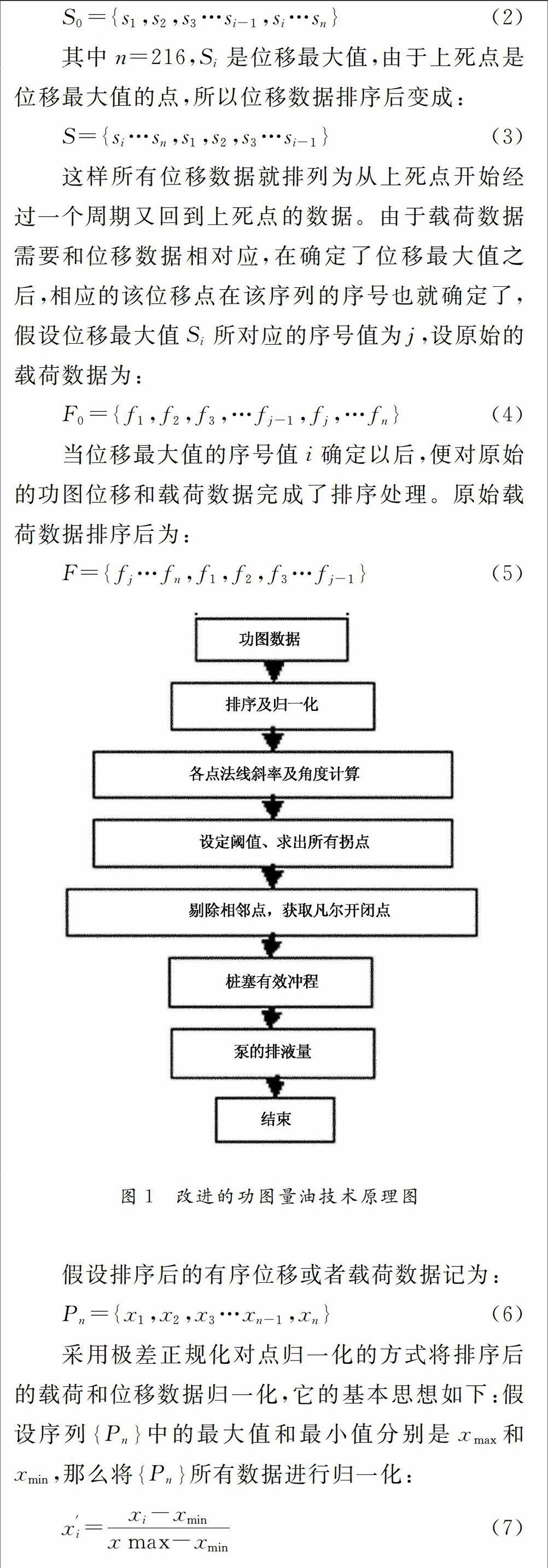
本文采用有效冲程法计算产液量。先通过地面自动化设备采集地面示功图,然后通过建立油井有杆泵抽油系统的力学数学模型(波动方程)将示功图转化为油井的泵功图,进而对原始泵功图数据点的梯度值进行计算,确定出功图的拐点,再通过同心圆或者椭圆逼近的方式来筛选出泵功图中油井的凡尔开闭点,从而得到油井柱塞的有效冲程,计算油井的产液量。改进的功图量油技术原理图如图1所示。
3.1数据预处理及归一化
对于载荷和位移数据,由于油井功图数据的精度和量纲是不一致的,而且在以后的逼近获取油井凡尔开闭点的计算中必须在量纲一致的坐标系下计算,否则会导致凡尔开闭点的错误,所以在计算拐点之前,需要先将载荷和位移数据进行预处理,预处理的任务就是把原始示功图归一化,即因次化。
由于功图数据是一个未排列的序列,先将功图数据从上死点开始进行排序。采集的载荷和位移数据分别包括216个离散值的点。假设位移数据记为:
S0={s1,s2,s3…si-1,si…sn} (2)
其中n=216,Si是位移最大值,由于上死点是位移最大值的点,所以位移数据排序后变成:
S={si…sn,s1,s2,s3…si-1} (3)
这样所有位移数据就排列为从上死点开始经过一个周期又回到上死点的数据。由于载荷数据需要和位移数据相对应,在确定了位移最大值之后,相应的该位移点在该序列的序号也就确定了,假设位移最大值Si所对应的序号值为j,设原始的载荷数据为:
F0={f1,f2,f3,…fj-1,fj,…fn} (4)
当位移最大值的序号值i确定以后,便对原始的功图位移和载荷数据完成了排序处理。原始载荷数据排序后为:
F={fi…fn,f1,f2,f3…fj-1} (5)
假设排序后的有序位移或者载荷数据记为:
Pn={x1,x2,x3…xn-1,xn} (6)
采用极差正规化对点归一化的方式将排序后的载荷和位移数据归一化,它的基本思想如下:假设序列{Pn}中的最大值和最小值分别是xmax和xmin,那么将{Pn}所有数据进行归一化:
经过归一化后,功图的载荷和位移都是位于0到1之间的无因次的数据,记为:
P′n={x′1,x′2,x′3…x′n-1,x′n}
(8)
3.2拐点的计算
图2即为抽油井的理想示功图,寻找功图拐点的目的即找到功图的凡尔开闭点,即下图中的A、B、C、D点。
在传统的拐点计算中,一般通过计算曲率,然后通过限定一个曲率域值,来达到提取凡尔开闭点的效果。本文采用梯度法定位出功图的拐点。油井的示功图轮廓线上,任何一点的法线总是垂直于该点的切线,在功图曲线非拐点处相邻点的法线角度大小几乎不变,而在功图拐点的地方拐点与相邻点之间法线角度的大小变化往往非常大。本文正是利用功图所有点法线方向的变化量并设定域值来检测出功图的拐点。
假设排序和归一化后的载荷和位移数据分别为{Xn},{Yn}:
{Xn}={x1,x2,x3…,xn} (9)
{Yn}={y1,y2,y3…yn} (10)
这里对于曲线上的任意一点T(xi,yi),要计算该点的外法线斜率及角度,首先设定该点的邻域链长为l,在T(xi,yi)点邻域链长为z的两点分别是M(xi-1,yi-1)和N(xi+1,yi+1),通过设定邻域链长l的值,近似认为曲线上T(xi,yi)点切线的斜率为M(xi-1,yi-1)和N(xi+1,yi+1)连线线段的斜率。T(xi,yi)点切线的斜率为:
由于T(xi,yi)相对于M(xxi-1,yi-1)和N(xi+1,yi+1)的连线的法线是一个矢量,可能会存在两个方向,对于这些点根据曲线的梯度示意图以及点位置与角度的关系加以判定,获取正确的法线方向。图3为各类曲线的梯度示意图。
对所有功图数据点计算以后,得到所有点法线角度的集合,这里由于示功图是一个周期的数据,原序列的起始点和末尾点的计算将根据序列的周期性来计算。
假设计算的功图所有点的法线角度集合为:Ωn={θ1,θ2,θ3,…θn},然后计算各个角度与相邻角度的差值,即得到任意点T(xi,yθi)与相邻点角度的差值为:
通过计算功图上每一点与相邻点角度的差值,得到这些点角度差值的集合:
φn={φ1,φ2,φ3,…,φn} (14)
通过对方向的变化量设定某个阈值φ,当φi超过这个阈值的时候,认为这个点为功图的拐点,φ值的确定可以根据具体的情况调整而定,以便求得理想准确的阈值。图4为采用前文所介绍的拐点确定算法定位的功图拐点。
3.3凡尔开闭点的确定
确定功图的拐点以后,必须剔除拐点中不需要的点,得到的凡尔开闭点,本文重点是找到下图中的D点,而AD间的距离即是油井的有效冲程,即:
Seff=SD-SA (15)A点一般都是位移为零的点,在计算D点时,根据椭圆的性质,采用同心椭圆逼近泵功图的方法基本可以确定上文所说的D点的位置,求得油井的凡尔开闭点。根据经验,一般将椭圆系数调整至0.01具有较强的稳定性。采用的公式如下:
m(xi-xmax)2+(yi-ymin)2=p (16)
需要考虑的是,在供液不足的情况下,功图的右下角会出现一个大的缺口,凡尔开闭点的选取经常会出现错误,如图5所示。
在上述拐点中,会出现一个E点离位移最大值、载荷最小值的点(Xmin,ymax)更近,使得有效冲程的长度远大于实际的长度,从而引起产量误差。在这种情形下,y值不超过所设阈值线y=y0且离点(xmin,ymax)最近时才是正确的凡尔开闭点,如图6所示。由于椭圆的曲率和长、短轴的大小是可调的,所以可以通过调整椭圆的圆扁以及大小找到正确的凡尔关闭点。
4实际应用
(1)选择江苏油田试采一厂真武油区的真1-2油井做测试。利用手持终端根据通信协议采集功图数据,得到原始示功图,按照前文所介绍的拐点以及凡尔开闭点算法求解过程,正确的找出了示功图的拐点以及凡尔开闭点,便可以求出油井的有效冲程。利用求产公式求解这口油井的产量并与计量站的产量进行比对,可以看出利用本文所述方法求出的油井产量的相对误差满足油田所要求的10%的误差率的要求。
对这一口井进行连续一周的观察和测试,产量的变化趋势如图7所示。可以看出本算法求解产量误差满足要求并趋于稳定。
(2)为了验证本文所研究的算法对于不同类别的油井是否具有更广泛的适应性,选取江苏油田-沙念油区的四口不同特点的油井一天的产油数据对上文的算法进行验证,这四口油井分别为供液不足的油井、泵漏失的油井、气体影响的油井以及正常油井,得出的各油井产量如下表2所示。
通过计算得到这四口油井产量与计量站的误差可知本文所研究的算法对选取的四口不同油井有明显的适用性,据此可以推断本文所研究的算法在更大范围内的众多油井都具有一定的适用性。
5结论
本文对油田抽油井功图量油算法进行了研究,并在江苏油田的android平台功图量油系统中得以应用,取得了良好的效果。实践证明本文所研究的功图量油算法基本满足了油井计量的需求,具有高精度、高适应性的特点。
