一种基于区间分割的时滞系统的镇定控制
2015-12-31李倩赵立英刘贺平
李倩+赵立英+刘贺平

摘要:通过对网络控制系统的结构分析,建立带有时滞和不确定性的网络控制系统的数学模型.在此模型的基础上,对时滞区间进行分段,通过构造李亚普诺夫泛函,给出矩阵不等式作为使得闭环系统渐进稳定的充分条件,并将此矩阵不等式线性化得到相应的反馈增益矩阵,最后通过数值仿真将时滞上界进行比较来证明此方法的有效性。
关键词:网络控制系统;时滞;李亚普诺夫函数;稳定性分析;线性矩阵不等式
中图分类号:TP273 文献标识码:A
1引言
网络控制系统(Networked Control Systems,NCS)是由控制器,传感器,执行器等部件通过通信网络连接构成的闭环系统.与传统的控制系统相比,网络控制系统具有接线少,成本低,便于安装和维护等优点.但是由于带宽有限等原因,各个节点通过网络在进行数据交换时,常会发生数据碰撞,丢失和重发等现象,出现数据交换时问的延迟.时延会降低系统的性能,甚至使系统失稳.同时,由于系统建模误差和工作环境的变化等原因,系统存在着结构不确定性.具有网络时延和不确定性的网络控制系统的分析和设计是当前研究的热点问题。
吴敏、何勇对于带有时变时滞的控制问题,提出了自由权矩阵方法,在原来模型转换的基础上大大降低了控制系统的保守性,Lam和Gao又引入了一种新的方法,将时变时滞进行分段,也在原来的基础上降低了保守性.同时存在时滞和不确定性的网络控制系统,其性能的分析和研究更加困难,也更加具有实际意义.分析此类网络控制系统的稳定性条件,并设计时滞和不确定性同时存在情况下的鲁棒控制器仍是国内外学者研究的重点内容。
本文针对带有时滞以及不确定性的网络控制系统,将时滞区间进行分段,分别构造Lyapunov泛函,利用Jensen不等式进行放缩,得出闭环系统稳定的充分条件,同时解线性矩阵不等式得到状态反馈增益矩阵K,实现时滞和不确定性背景下的控制器重新设计.最大允许时滞上界往往能反映系统抵御外界干扰的能力,本文给出的条件相比文献局限性更小,并且本文可实现时滞和不确定性同时存在的情形下的系统镇定。
2问题描述
2.1模型描述
下面考虑带有不确定性的时滞系统:
其中x(t)∈Rn,u(t)∈Rm是状态向量和控制输入向量.A、B是适当维数的固定矩阵,矩阵△A,△B表示系统中的不确定性,且满足[△A △B]=DF(t)[E1 E2],其中D,E1,E2是适当维数的实常数矩阵,F(t)是Lebesgue可测的未知矩阵函数,满足FT(t)F(t)≤I.状态反馈增益矩阵为K,则有
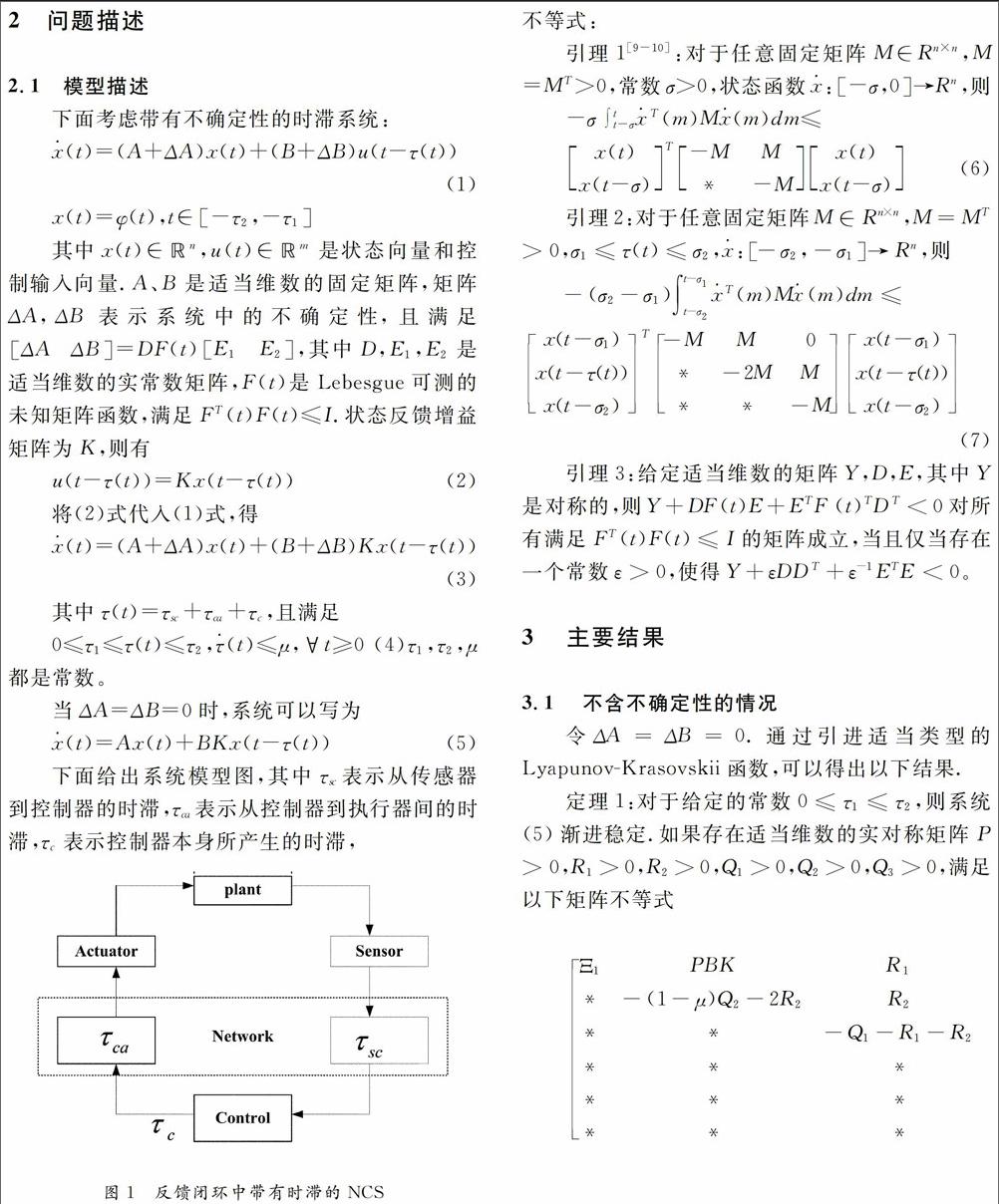
下面给出系统模型图,其中τsc表示从传感器到控制器的时滞,τca表示从控制器到执行器问的时滞,τc表示控制器本身所产生的时滞,
假设1传感器是时钟驱动,控制器与执行器是事件驱动的.
假设2系统中所有信号都是通过时间戳来传达的.
2.2主要引理
本文研究的目的是引入一种新的时滞依赖稳定性分析方法,来确保系统(3)对于任意的τ(t)都能保证渐进稳定.为了达到此目的,引入下列不等式:
引理1:对于任意固定矩阵M∈Rn×n,M=MT>0,常数σ>0,状态函数x:[-σ,0]→Rn,则
引理3:给定适当维数的矩阵Y,D,E,其中y是对称的,则y+DF(t)E+ETF(t)TDT<0对所有满足FT(t)F(t)≤I的矩阵成立,当且仅当存在一个常数ε>0,使得Y+εDDT+ε-1ETE<0。
3主要结果
3.1不含不确定性的情况
令△A=△B=0.通过引进适当类型的Lyapunov-Krasovskii函数,可以得出以下结果.
定理1:对于给定的常数0≤τ1≤τ2,则系统(5)渐进稳定.如果存在适当维数的实对称矩阵P>0,R1>0,R2>0,Q1>0,Q2>0,Q3>0,满足以下矩阵不等式
同理可得V(t)<0,则系统渐进稳定.
Case3:当n≤r(t)≤ζ时,可以得出系统是渐进稳定的。证毕。
该定理需要满足3个矩阵不等式的条件,文中为了简便,只给出了一个。下面中的定理类似,但是在数值仿真时,3个条件都需要满足。
证毕。
以上求解控制器K的方法在文献中也有体现。
3.2下面考虑带有不确定性的情况
定理3:给定常数0≤τ1≤τ2,不确定系统(3)是渐进稳定的.如果存在实对称矩阵P>0,R1>0,R2>0,Q1>0,Q2>0,Q3>0,K,D,E1,E2是适当维数的矩阵,对于一个常数ε>0,有矩阵不等式
4算例仿真
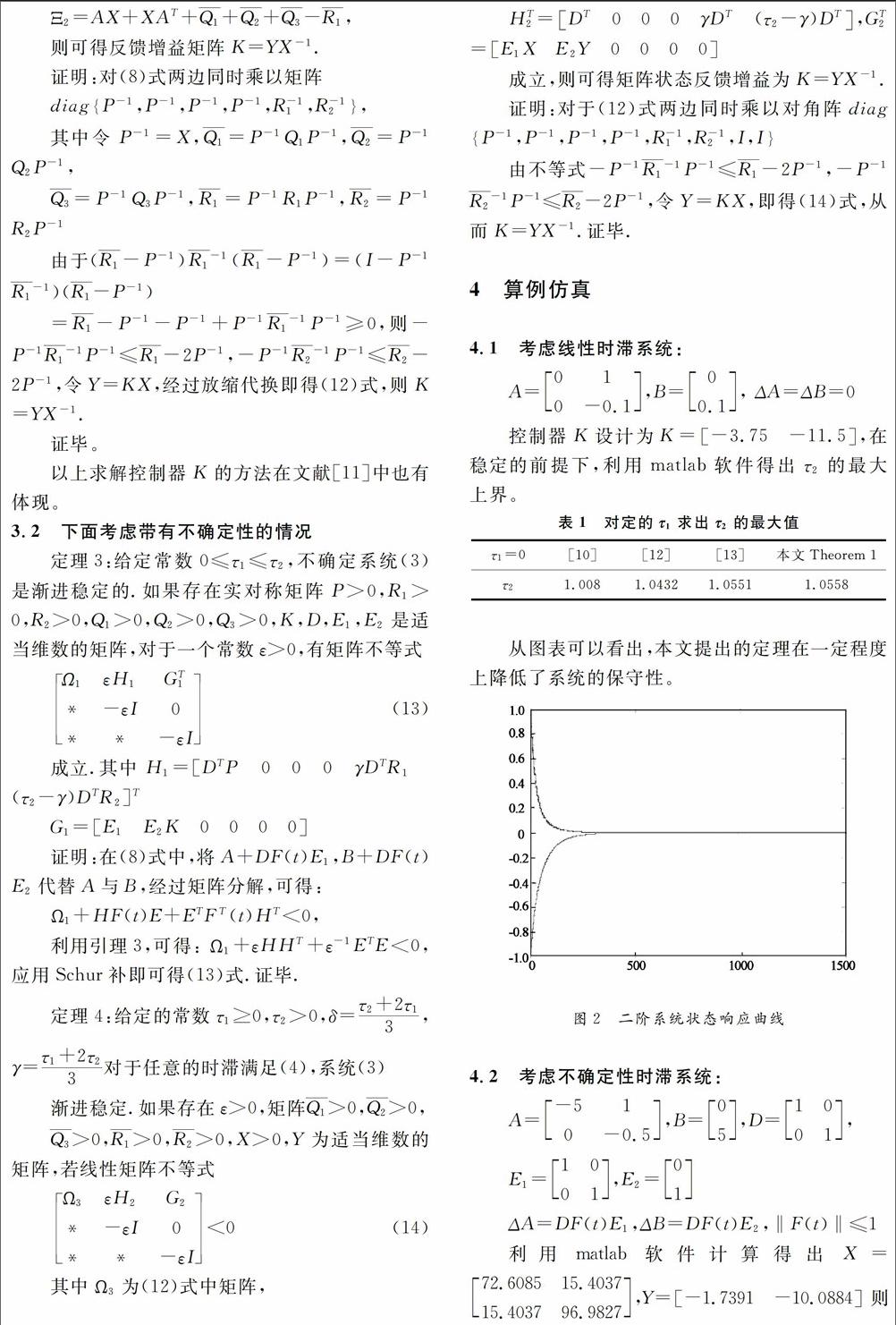
4.1考虑线性时滞系统:
控制器K设计为K=[-3.75 -11.5],在稳定的前提下,利用matlab软件得出τ2的最大上界。
从图表可以看出,本文提出的定理在一定程度上降低了系统的保守性。
4.2考虑不确定性时滞系统:K=YX-1=[-0.0019 -0.1037],当K取定时,所求出的时滞上界为τ2=0.65。
5结论
本文基于Lyapunov稳定性理论和线性矩阵不等式的方法,研究了同时存在时滞和不确定性的网络控制系统的稳定性问题,并在此基础上进行了控制器的重新设计,分不同情况给出了系统渐进稳定的充分条件,并求解了相应的反馈增益矩阵K.同时,通过本文方法,利用线性矩阵不等式,求解出了比以往结果更好的最大允许时滞上界.最后,通过算例仿真验证了本文分析和设计方法的有效性.
