基于VERICUT非正交五轴机床加工仿真技术研究
2015-12-28颜士肖蹇悦宋健穆英娟
颜士肖,蹇悦,宋健,穆英娟
(上海航天精密机械研究所,上海 201600)
基于VERICUT非正交五轴机床加工仿真技术研究
颜士肖,蹇悦,宋健,穆英娟
(上海航天精密机械研究所,上海 201600)
摘要:针对非正交五轴联动加工机床结构复杂,加工准备周期长,程序验证复杂、干涉碰撞易发生等特点,对非正交五轴机床加工仿真技术进行了研究。利用VERICUT仿真软件,以DMU 70evo机床为原型,构建与实际机床一致的虚拟仿真环境,主要包括仿真机床模型和仿真控制系统。利用建好的仿真环境,进行某异型法兰零件的数控加工仿真。结果表明:构建好的机床模型准确、可靠,验证了NC程序的正确性,提高了加工的准确性、安全性和生产效率。
关键词:非正交;五轴机床;仿真环境;仿真模型;仿真控制系统
0引言
随着零件结构和加工工艺的日益复杂及数控机床加工速度、精度和智能化水平的不断提高,各类数控机床已成为装备制造业,特别是航空、航天、军工等制造业必不可少的加工设备。而以提高数控加工效率和自动化水平为目标的五轴联动加工机床已成为机床制造业的一个重要发展方向[1]。
五轴联动加工机床存在数控程序的编制及检测难度大等问题,而NC程序的正确性是保证多轴联动数控机床加工过程中的安全性和零件加工品质的关键,零件加工前的试刀已不能满足五轴联动数控机床的加工需求[2]。特别是对于非正交的五轴联动机床,程序员已很难直观分析机床的运动轨迹,给产品品质和安全生产带来了很大的风险和隐患。利用VERICUT等虚拟加工仿真软件进行加工过程的仿真已成为解决上述问题的有效手段[3]。
目前,很多学者已经开展了部分基于VERICUT的机床仿真技术研究,包括立式三轴加工机床仿真技术研究[4]、正交转台与摆轴五轴机床仿真技术研究[5]等。然而,针对非正交转轴的五轴联动机床,特别是以空间矢量轴为旋转轴的五轴机床研究少见报导。
现以典型非正交五轴联动机床DMU 70evo为原型(该机床b旋转轴为一般空间矢量),构建与实际机床一致的虚拟仿真环境,包括机床模型构建、模型参数设定和控制系统定制等,并利用此虚拟仿真环境进行某零件的加工仿真,以此验证模型的正确性,指导实际加工生产,并为其他机床仿真环境构建提供方法和经验。
1机床模型构建
1.1机床模型树构建
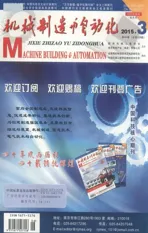
VERICUT中机床模型以组件树的形式存在,组件树反映的是机床各部分之间的相对位置和运动依附关系。根据机床原型DMU 70evo机床实际结构、运动关系,确定机床各部分间的相互依附关系,见图1,图中箭头指向为下级子组件。
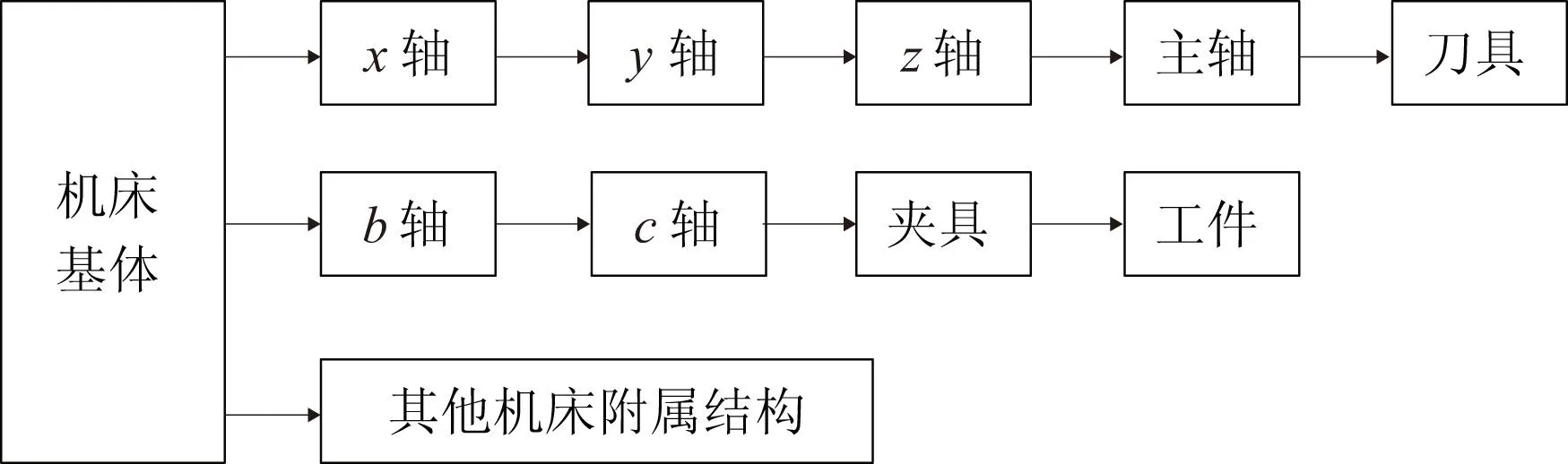
图1 DMU 70evo机床结构依附关系
根据机床组件依附关系图,在VERICUT中建立机床模型组件树。该机床为典型的非正交五轴机床,b轴为空间矢量旋转轴,c轴为垂直矢量旋转轴,b、c旋转轴交点与工作台表面有一定距离偏差,图2所示。旋转轴位置、方向及其与工作台距离偏差这3个因素,在建立机床模型时必须充分考虑,确保装配后应与实际机床保持一致,否则仿真结果将不具有指导性。根据图2中给出的旋转轴位置、方向及其与工作台距离偏差,正确设置组件树中各组件坐标系位置及方向,如图3所示。
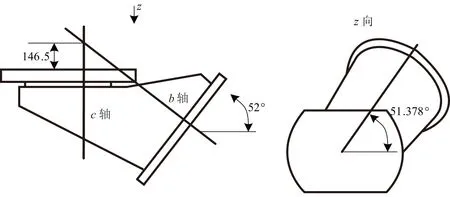
图2 DMU 70evo旋转轴位置及方向

图3 机床模型树
1.2机床模型结构装配
机床模型树仅表示机床各部分之间的相对位置和相互运动关系,并不反应机床的实际结构形式,需要通过添加模型结构才能体现。VERICUT机床模型结构的建立有两种方式。1) 利用VERICUT软件自带“添加模型”对话框绘制模型,此方法仅适合简单结构构建;2) 利用较为常用的CAD软件,如Pro/E、UG等来完成,通过数据接口保存成“IGES”、“STL”等格式,导入VERICUT模型树中进行虚拟装配。
VERICUT中的几何模型主要用于虚拟机床的可视化和碰撞检测,精度越高,结构特征越接近真实物理模型,机床渲染和碰撞检测的精度也越高。但同时也会导致模型所占计算资源增多,致使系统运行速度的下降。综合考虑机床结构特征、仿真精度和计算效率,对机床主要结构(包括:机床基体、x轴、y轴、b轴、c轴和机床外形)进行合理简化,并利用Pro/E软件构建各部分模型,转换成“STL”格式文件,供仿真环境使用,见图4,其余必需的简易结构通过VERICUT自带功能创建。将建好的结构模型导入VERICUT组件树中,正确设置模型在组件中的位置。设置旋转模型时应注意,模型旋转中心应设置在组件旋转轴上。构建好的机床模型如图5所示。

图4 机床各主要部分结构图
图5 机床虚拟仿真模型
2机床模型参数设定
a) 运动轴方向及速度设定
该机床运动轴主要有x、y、z线性轴和b、c旋转轴,方向及速度设定主要为对运动轴正方向和快速移动速度进行设置。首先利用VERICUT系统提供的“MDI”功能判断当前机床模型运动正方向,若与实际相反,可通过“组件配置”功能进行“反向”设置,同时可以设置快速移动速度等。
b) 碰撞检测设定
碰撞检测为VERICUT机床运动仿真的重要功能,对加工过程的安全性进行仿真判断,可以有效防止加工过程中撞刀等现象的发生。根据DMU 70evo机床的运动链关系,将机床碰撞检测进行分组,并设定最小安全距离为2.5 mm,见表1。根据表1组别分类及安全距离,通过VERICUT“机床设定”功能中的“碰撞检测”选项,进行碰撞检测设定。

表1 机床碰撞检测分组 mm
c) 行程设定
行程设定主要用于限制机床的运动范围,包括线性轴行程和旋转轴行程,可以实现加工过程的超程判断,确保工件与机床的匹配及工件在工作台定位的合理性。表2为DMU 70evo机床各轴的运动行程,据此数据,通过VERICUT“机床设定”功能中的“行程极限”选项,进行行程极限设定。
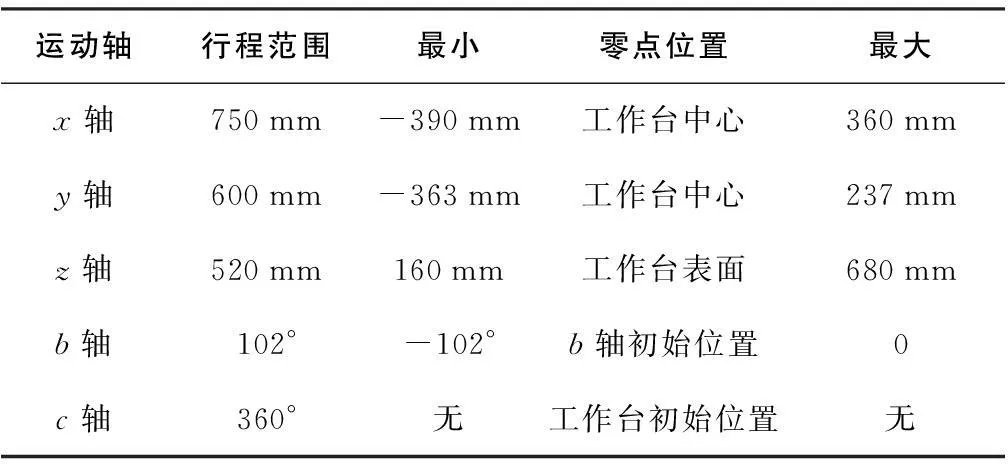
表2 机床各轴运动行程
3控制系统定制
控制系统是虚拟数控机床模型的核心,负责将数控编码转化为各个轴的运动,从而驱动加工仿真运行,是仿真加工过程和实际加工过程一致的关键,控制系统定制就是在VERICUT软件中建立数控编码翻译模块。
DMU 70evo采用Heidehain530控制系统,根据实际机床控制系统指令代码集及其功能对仿真模型控制系统进行定制,定制过程主要如图6所示。图7为斜面功能(PLANE)指令的定制过程。
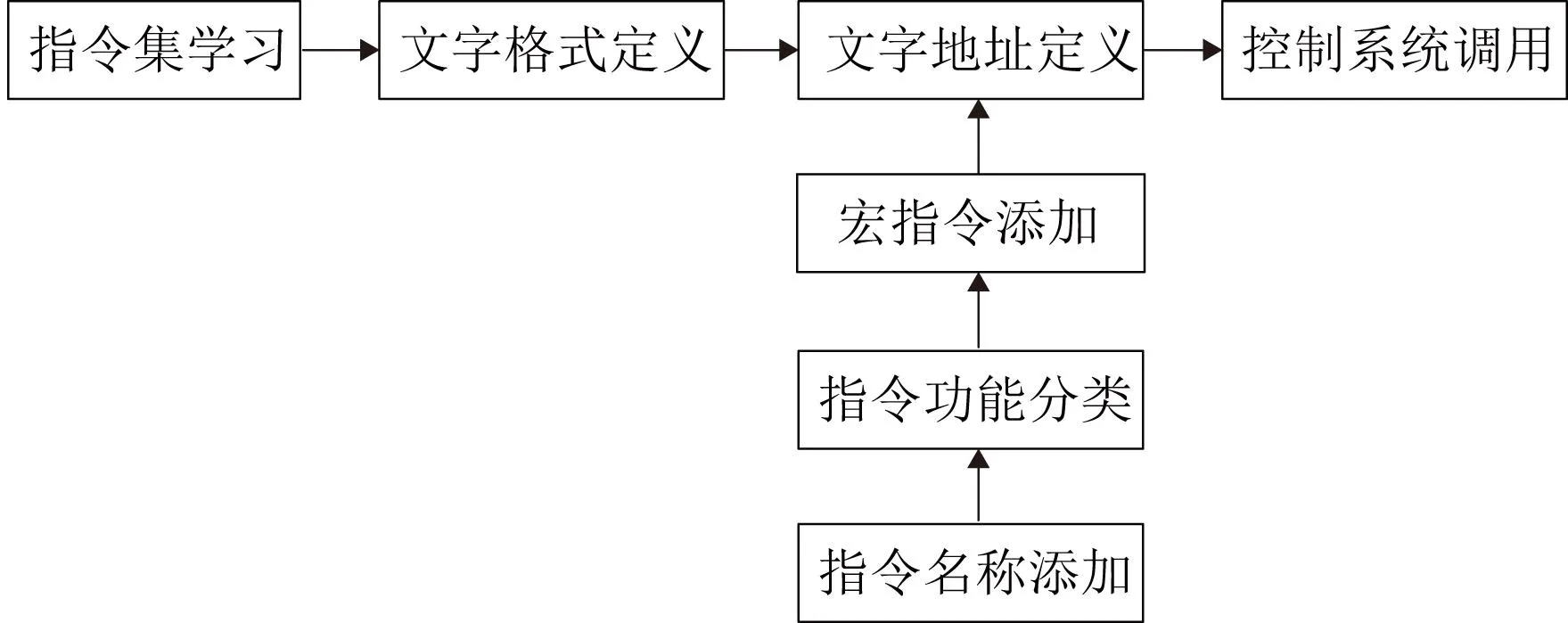
图6 控制系统定制流程
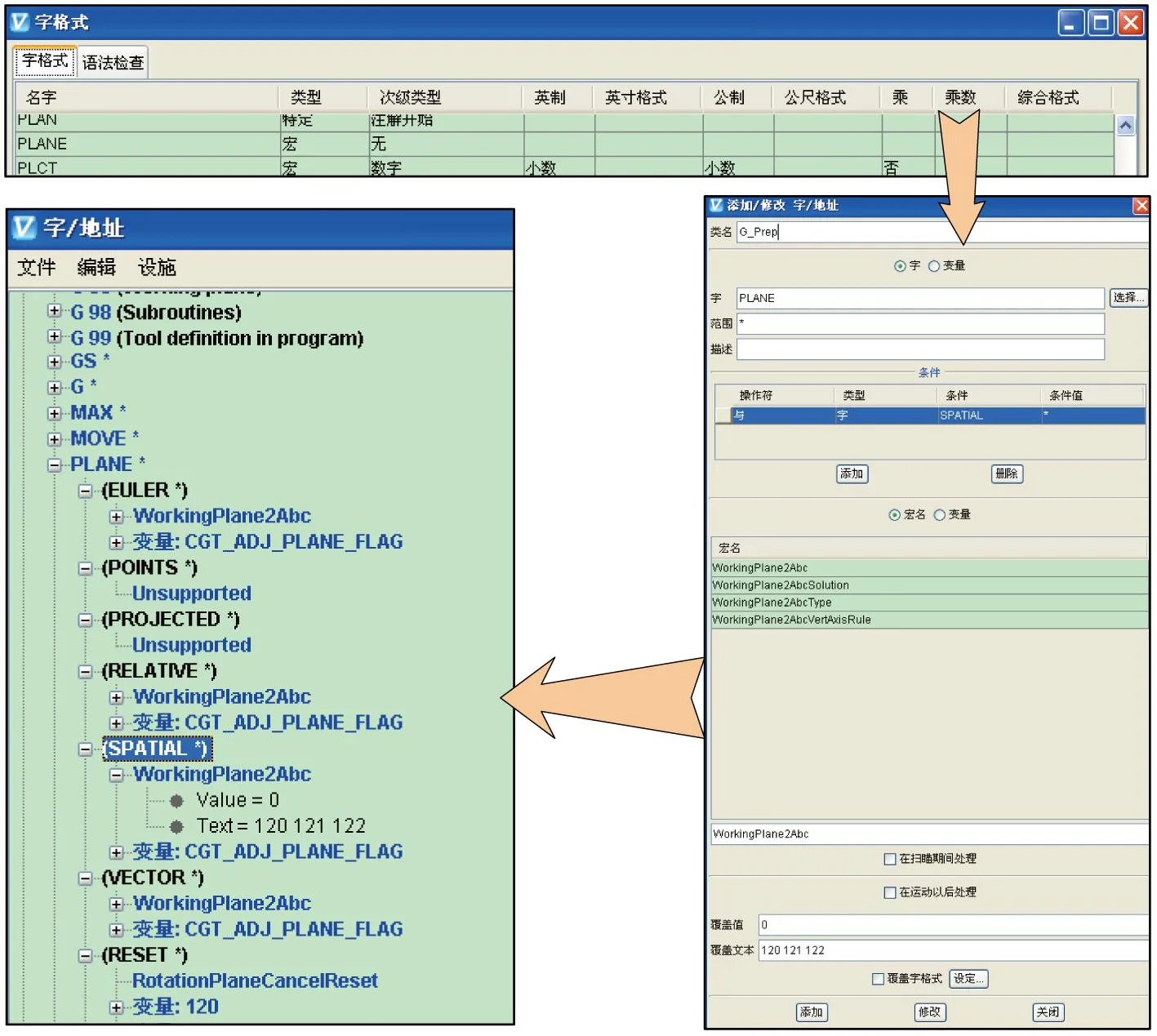
图7 斜面功能(PLANE)指令的定制
4机床加工仿真环境实例验证
完成DMU 70evo仿真环境研究构建后,选择某异型法兰类零件(图8)的加工仿真来验证该模型的正确性。根据零件加工要素,编制NC代码,并导入仿真组件树中。同时,在组件树中添加零件毛坯、建立仿真刀具库和合理设置工件坐标系。通过对异型法兰零件的数控加工仿真,获得了良好的效果,验证了构建好的DMU 70evo模型的正确性,图9为数控加工仿真过程。

图8 某异型法兰类零件

图9 某异型法兰类零件数控加工仿真过程
5结论
针对非正交结构五轴联动机床结构复杂、加工准备时间长、程序验证困难等问题,在总结VERICUT仿真技术基础上,以DMU 70evo机床为原型,定制VERICUT机床仿真环境,包括机床物理结构的创建、运动关系的匹配、碰撞检测和行程设定以及控制系统的配置。利用建立好的仿真环境,对某异型法兰零件的数控加工进行仿真,验证了仿真环境的正确性和有效性。
参考文献:
[1] 熊永超, 陶勇. 国产数控机床现状及发展趋势[J]. 煤矿机械, 2006, (3): 361-362.
[2] 郭宏伟, 蔡安江, 赵娜, 等. 基于VERICUT的多轴联动数控加工仿真[J]. 机床与液压, 2011,(17): 113-115.
[3] 胡宁国. VERICUT仿真加工软件对制造业的重要作用[J]. 航空制造技术, 2004, (2): 100.
[4] 魏林. 基于VERICUT的数控加工仿真系统的研究[D]. 沈阳:沈阳理工大学, 2008.
[5] 徐刚. 基于VERICUT的多轴机床加工仿真研究[J]. 制造技术与机床, 2011, (2): 33-36.
Research on Non Orthogonal 5-axis Machining Simulation Based on VERICUT
YAN Shi-xiao, JIAN Yue, SONG Jian, MU Ying-juan
(Shanghai Spaceflight Precision Machinery Institute, Shanghai 201600, China)
Abstract:Due to the complex structure of non orthogonal 5-axis, long time ready for machining, difficult program verification and collision occurring easily, the non orthogonal 5-axis machining simulation is researched on. This paper tries to construct the simulation environment, which contains the simulation machine just as the machine of DMU 70evo and the simulation control system with the software of VERICUT. Then the simulation environment is used for simulating the machining process of a special-shaped flange. The result shows that the environment is precise and reliable, which is used to check the accuracy of the NC program and improve the accuracy, safety and efficiency of CNC manufacturing.
Keywords:non orthogonal; 5-axis machine; simulation environment; simulation machine; simulation control system
基金项目:国家自然科学基金资助项目(51205062);福建省自然科学基金(2011J01299)
收稿日期:2014-11-28
中图分类号:TG659; TP391.9
文献标志码:B
文章编号:1671-5276(2015)03-0131-03
作者简介:颜士肖(1988-),男,硕士研究生,主要从事数控加工技术研究,包括数控加工工艺、数控仿真和优化等。