立式动平衡机可收缩式接盘装置的研究与应用
2015-12-28封高歌吴建民张玉来
封高歌,吴建民,张玉来
(1. 上海工程技术大学 机械工程学院,上海 201620; 2. 浙江舟山航海学校,浙江 舟山 316000)
立式动平衡机可收缩式接盘装置的研究与应用
封高歌1,吴建民1,张玉来2
(1. 上海工程技术大学 机械工程学院,上海 201620; 2. 浙江舟山航海学校,浙江 舟山 316000)
摘要:设计了一种可消除夹具产生的径向力对主轴损害的可收缩式接盘装置,可应用于盘类转子的立式自动动平衡机的定位夹紧,具有消除夹具产生径向力对主轴损害的功能。将传统整体接盘分为两层分离的内外轴套筒形式,中间用可收缩式轴承将接盘内外套筒固定连接起来,组成一个整体的可收缩接盘。可收缩式轴承利用开关继电器运动,将销子产生向外的径向位移差转换成固紧件半封闭式内外套筒的轴向位移,最终达到消除主轴径向力的功能作用。相比较于现阶段解决此类问题的“主轴抽轴技术”具有结构简单、易于安装及成本较低等优点,可应用于盘类转子的立式自动动平衡机的工件定位夹紧。
关键词:动平衡机;立式;可收缩式接盘;可收缩式轴承
动平衡是旋转类产品生产、制造过程中必须解决的一个基本共性问题,其优劣程度直接决定着产品的工作性能、使用寿命以及产品品质等[1-4]。全自动动平衡的过程中主要分为三大系统:检测系统、定位夹紧系统、去重系统,其中定位夹紧系统是连接其前后两大功能区的重要装置。
传统的平衡机采用手工去重方式,不仅生产效率低、校正品质差,而且对转子的破坏大,不适应大批量生产的要求[5-8]。随着现代工艺发展的要求全自动动平衡机由于工作效率高,可流水线生产,精度高等特点,已逐渐代替传统的平衡机。盘类转子的动平衡主要采用的是立式自动动平衡机;摆架检测转子不平衡量之后,通过三角卡盘夹紧接盘,继而转向定位、去重。在此过程中,三爪卡盘对工件的定位夹紧是通过对接盘的直接夹紧来实现的。三爪卡盘对主轴的损害最主要构成因素有:1) 产生较大的径向力,这种较大的夹紧力通过接盘传递到主轴上;2) 由于三爪卡盘使用久了,随着卡盘的磨损三爪会出现喇叭口状[9],由于加工和磨损等各种原因,三爪也会慢慢偏离盘体的主轴中心。由于主轴接盘为实心结构,以上两种原因均可造成对主轴接盘夹紧时产生的径向力对主轴造成的伤害。
主轴是自动动平衡机最为主要部件之一,主轴套筒安装比较复杂、主轴也不易更换。 为了克服三角卡盘对工件定位夹紧时对主轴带来的损害和现阶段解决技术方法的不足之处,提出一种新型的可收缩主轴接盘装置,该接盘装置能消除卡盘夹紧对主轴的伤害,而且不会影响主轴传动工件对不平衡量的测定。
1可收缩式接盘的设计
1.1可收缩式接盘设计方案
对可收缩式接盘的整体结构设计思路是:在自动动平衡机对工件进行静、动平衡测试时,可收缩式接盘处于“打开”状态,在对工件进行去重时可收缩式接盘处于“关闭”状态,以此完成对工件的定位夹紧功能。在此设计思路的基础上对可收缩式接盘的结构设计方案:由可收缩式固紧件、开关继电器、可收缩式轴承圈装配成可收缩式轴承,再与接盘内外套筒装配而成。其特征是:将传统实体接盘分为两层分离的内外轴套筒形式,中间用可收缩轴承将接盘内外套筒固定连接起来,组成一个整体的可收缩式接盘(图1)。
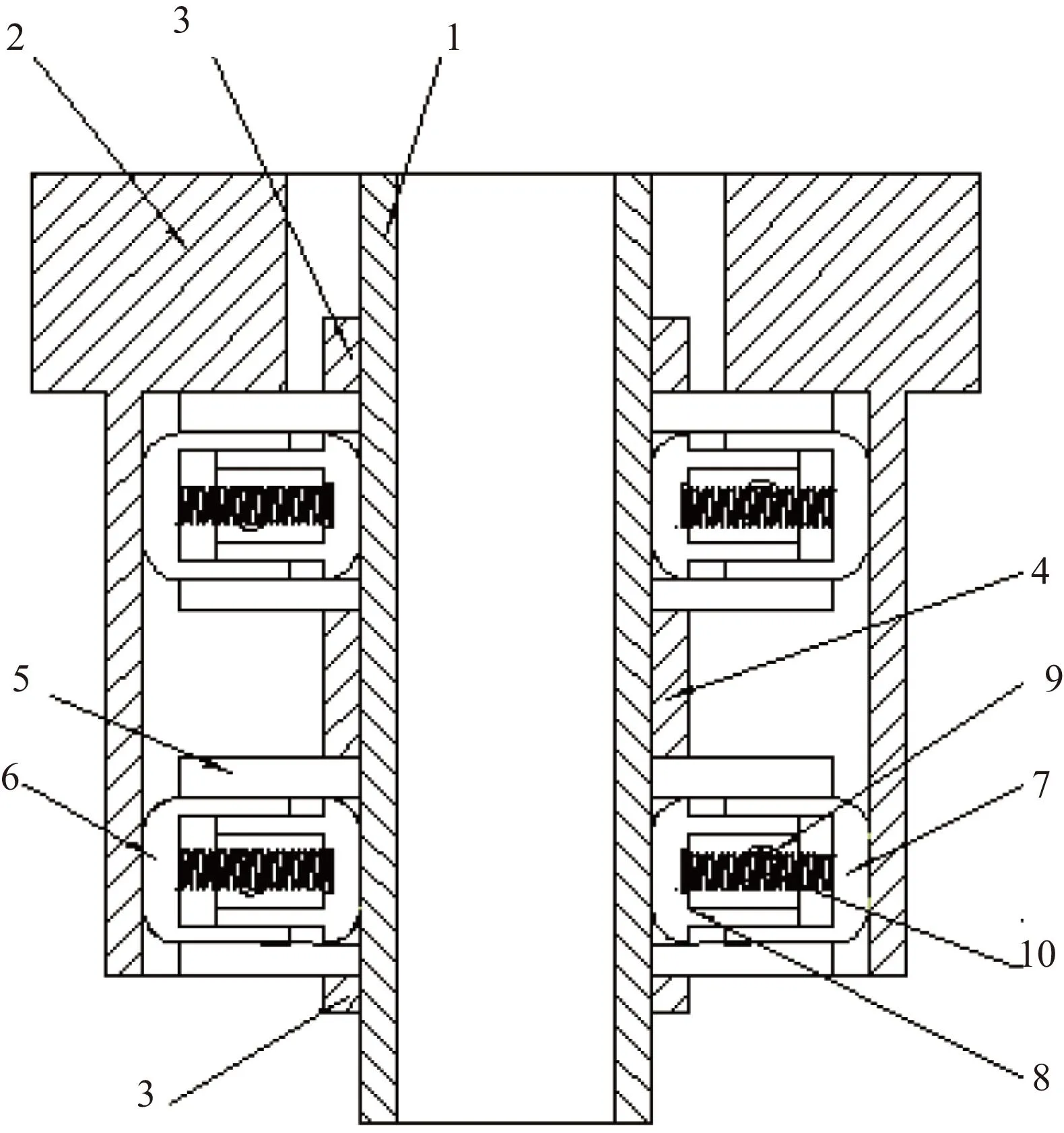
1—内套筒;2—外套筒;3—定位卡环;4—定位套筒;5—轴承圈;6—可收缩式固紧件;7—半封闭式外套筒;8—半封闭式内套筒;9—定位销;10—弹簧图1 可收缩式接盘
在主轴带动接盘旋转工件时,开关继电器处于常开状态,定位销使半封闭式外套筒与半封闭式内套筒卡住连接为一体。主轴带动接盘转向之后,需要夹具对接盘定位夹紧时,给开关继电器信号将其变为闭合状态,开关继电器运动,使连接在其上的定位销产生向外的径向位移差,设置既定位移差为可收缩式固紧件的半封闭式内套筒的壁厚,开关继电器就停止运动,从而达到消除主轴径向力的功能作用。当去重过程完成后,夹具松开,可收缩式固紧件中的两层相互啮合的闭合套筒由于其中的弹簧弹力恢复到原始位置,再次给继电器一个信号,定位销即可复位。
1.2力学分析
三爪卡盘对可收缩式接盘的三个力是呈120°作用于接盘的外套筒上,并且三个力处于同一水平面上,每个可收缩式接盘的四个固紧件于90°互为对称的贴近可收缩式接盘的外套筒内壁上。在定位夹紧系统中,三爪卡盘伸出卡爪夹紧接盘,接盘受到卡盘的三个轴向径向力作用,可收缩式接盘轴承套如图2所示,以此基础上分析其对固紧件所处的4个位置的受力和弯矩影响,判断三爪卡盘对接盘固紧件相接的1、2、3、4四个点上的受力与弯矩。


图2 可收缩式接盘轴承套装配图
2基于solidworks的仿真分析
在solidworksRSimulation中对可收缩式固紧件进行一系列的性能分析内容包括:应力强度、位移、应变以此用于验证其在结构性能上的可靠性。
材料选用高强度、高韧性、耐磨、耐腐蚀、耐低温、耐高温、无磁性等特殊性能合金钢。在连结上选用弹簧连接的方式,轴向刚度为250N/m,张力预载力设定为5N,零部件采用无穿透的接触类型。添加一个固定几何体的夹具,并且添加两个相反的作用力,一个加载在3端面上,另一个加载在2端面上,每个曲面上应用500N的力,力的方向为法向。在圆角区域应用网络控制单元大小为0.929mm,比率为1.5,整体生成高品质网络,默认的整体大小为1.859mm,公差为0.093mm。
运行分析结果:
应力结果:寻找可能产生较大应力或者位移的零部件位置,任意取主观可能的5个位置点,如图3、图4所示最大应力点产生在节点772处,应力为7.24MPa。
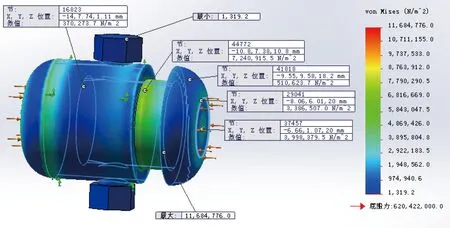
图3 应力图解

图4 应力统计图解
图5显示为五个选取点的应力变化曲线,表明:1) 在五个位置的应力变化是按不规律分布的。2) 在从位置选取节点457至节点041至节点818,从端面圆心处分散到边缘端点应力在不断减小,也表明整个端面的应力最大发生在中心处。依据此次分析过程,提出假设:整体可收缩式接盘最大应力发生处可在节点772所处的轴侧面。

图5 应力变化曲线图
利用solidworksRSimulation确定最大最小应力发生处和应力大小。如图3所示最大应力发生在轴侧面,应力大小为11.67MPa<σp=620MPa,也验证了上述假设的成立。Fd是端面法向力,在三角卡盘对可收缩式接盘夹紧时产生的大小为500N的径向力。Ao则为端面接触面的面积,直径为10mm的圆面。

说明整个可收缩式固紧件的刚性强度条件上的满足。
在三角卡盘对工件定位夹紧时,产生的微小位移,也是整个设计方案消除径向力的产生必然的结果,如图7所示最大位移发生在端面中心为5.63×10-4mm,远远小于可发生断裂时的形变位移量。

图7 最大、最小的位移图解
3结语
在运动仿真软件Solidworks上完成了对可收缩式接盘以及核心可收缩式固紧件的的原理机构设计并且对其进行力学分析,验证了收缩式接盘设计上的可靠性。使用SolidworksRSimulation完成了对可收缩式固紧件的应力及位移仿真分析,得到可靠数据及结果,验证了开关继电器运动使定位销产生向外的径向位移差,设置既定位移即固紧件内套筒的壁厚,最终达到消除主轴径向力的功能作用,为其解决夹具对主轴的径向力伤害提供很好的借鉴方法。
参考文献:
[1] BRUCE HENDRICKSON, KAREN DEVINR. Computer Methods in Applied Mechanics and Engineering[J]. Dynamic Load Balancing in Computational Mechanics, 2013,184 (3): 485-500.
[2] NGUYEN VAN KHANG, NGUYRN PHONG DIEN. Mechanism and Machine Theory [J]. Analytical and Experimental Study on the Dynamic Balancing of Flexible Mechanisms, 2007,5(42):626-635.
[3] 董文仲,董文胜,安础,等. 船用柴油机及内燃机车曲轴的磁粉探伤[J]. 中国修船,2000, (5) : 21-24.
[4] 都强. 轮胎动平衡试验机算法解法和控制方法的研究[D]. 青岛:青岛科技大学,2005.
[5] 张超群. 全自动动平衡去重机去重策略研究[D]. 杭州:浙江大学,2004.
[6] 杜守成. 动平衡测试系统仿真及检测技术研究[D]. 上海:华东理工大学,2004.
[7] 李念峰,丁原. 全自动平衡机系统组成与控制[J]. 制造业自动化, 2007,29(11):48-51.
[8] 刘佳,蔡萍,赵鼎鼎. 两工位自动钻削动平衡机及其去重策略[J]. 组合机床与自动化加工技术,2009, (5): 29-32.
[9] 李文峰. 三爪卡盘装夹偏心轴数控车削探析[J]. 中国科技纵横, 2011(19):118-119.
Research on Retractable Adapting Plate of Vertical Balancing Machine and Its Application
FENG Gao-ge1, WU Jian-min1, ZHANG Yu-lai2
(1. College of Mechanical Engineering, Shanghai University of Engineering Science, Shanghai 201620, China;
2. Zhejiang zhoushan maritime school, Zhoushan 316000, China)
Abstract:This paper designs a retractable adapting plate device which can be used for positioning and clamping device of the disk rotors on dynamic balancing machine to prevent the damage of the spindle with the radial force generated by the fixture. When the traditional joint plate is divided into two separated layers ---the inner and outer sleeve, the refractable bearing can be used to fix and connect the inner and outer sleeves into the whole retractable adapting plate. The movement of the retractable bearing controlled by switch relay, axial displacement of the semi-closed inner and outer sleeve is converted by outward radial displacement difference produced by the pin so as to ultimately eliminate the radial force of the spindle. This design has advantages of simple structure, easy installation and low cost. compared with usual spindle shaft technology and can be applied to position and clamp disk rotors on dynamic balancing machine.
Keywords:balancing machine; vertical type; retractable adapting plate; retractable bearing
基金项目:国家自然科学基金资助项目(51375145)
收稿日期:2014-11-29
中图分类号:TH131
文献标志码:B
文章编号:1671-5276(2015)03-0039-03
作者简介:封高歌(1989-),男,安徽蚌埠人,硕士研究生,从事动平衡机研究。