基于LQG/LTR的飞翼飞机阵风减缓系统研究
2015-12-25彭程王新民张斯哲陈晓
彭程,王新民,张斯哲,陈晓
(西北工业大学自动化学院,陕西西安710129)
0 引言
飞机在飞行过程中,不可避免地会受到大气紊流的干扰。大展弦比飞翼飞机由于其高升阻比、纵向中立稳定性以及经常执行远程、长航时飞行任务的特点,使其更加容易受到大气紊流的影响,因此需要设计鲁棒控制器,减缓阵风对飞机的影响。
线性二次型/回路传输恢复技术(LQG/LTR)是鲁棒控制系统设计中研究较多的方法,它的控制器结构比较简单、鲁棒性好,具有很高的工程应用价值[1-7]。目前,基于LQG/LTR技术的阵风减缓系统主要存在两个问题:(1)仿真中多使用简单的Dryden紊流[1-3],而我国《运输类飞机适航标准》(CCAR-25)则要求使用Von Karman大气紊流;(2)文献中没有同时兼顾对飞机过载和翼根弯矩的减缓。
针对以上问题,本文首先对不能直接用于仿真的、功率谱为无理谱的Von Karman大气紊流进行有理化,得出近似的紊流模型;然后针对飞翼飞机多操纵面的特点,把控制分配技术与阵风减缓系统结合在一起,通过优化算法将阵风减缓控制器的输出量重新分配到各个操纵面上,使得各个舵面协调偏转,在减缓阵风影响的同时,最大限度地降低了机翼的翼根弯矩。
1 Von Karman大气紊流
为了提高仿真结果的逼真度和工程实用性,阵风模型为大气扰动中最常遇到的紊流。根据CCAR-25的要求,大气紊流采用Von Karman紊流,它比Dryden紊流更加能真实地反映大气的紊流特性,因此只要可行,最好使用 Von Karman大气紊流[8],其功率谱为:
由于Von karman模型为无理谱,不能直接用于飞行仿真,因此本文采用最小二乘法对原功率谱进行有理化,得到近似的有理谱,即:

设一环节为 H(jω),输入为单位白色噪声x(t),输出为有色噪声y(t)。这个能把白噪声转化为有色噪声的环节称为成形滤波器。
根据线性系统理论,并且考虑到输入信号为单位白噪声即PX(jω)=1,可得:

由此可见,成形滤波器可由输出频谱共轭分解得到。因此令PY(ω)=P^(ω),就可以得到大气紊流的成形滤波器。
本文采用MIL-F-8785C建议的成形滤波器H(s)=M(s)/N(s),其中:

取V=150 m/s,L=760 m,σt=2 m/s,得到原紊流模型和本文所建立模型的功率谱密度曲线,如图1所示。从图中可以看出,两条曲线在低频段和高频段都拟合较好,因此本文所建立的大气紊流模型是可行的。
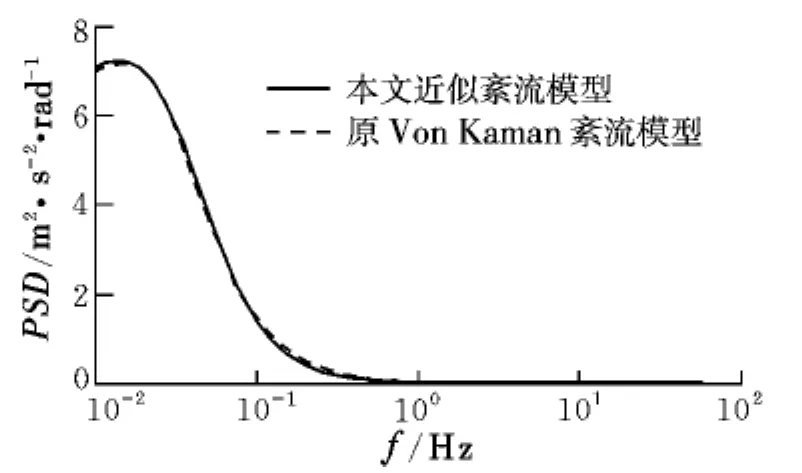
图1 功率谱曲线Fig.1 Power spectrum
2 飞翼飞机阵风减缓系统设计
2.1 控制方案
本文中算例飞翼飞机有4对升降副翼(即舵1到舵4)和1个海狸尾俯仰控制面,如图2所示。飞翼飞机升降副翼的气动特性相同,只是舵效不同,这种多操纵面布局在控制系统设计上可以通过优化设计取得更好的控制效果。

图2 样例飞翼无人机舵面配置示意图Fig.2 Control surface configuration of the sample flying wing UHV
本文采用直接力闭环控制方案。飞翼飞机不同于常规布局飞机,它没有靠近重心的舵面,其升降副翼距重心较远,会产生较大的力矩,须同时配合偏转特定的海狸尾操纵面,来抵消升降副翼偏转产生的附加俯仰力矩[9]。
如图3所示,阵风减缓系统由两部分组成:LQG/LTR控制回路和直接力产生回路。LQG/LTR控制回路利用控制器的鲁棒性抑制大气紊流对飞机的干扰;直接力产生回路反馈法向过载,产生直接力,尽最大限度抵消阵风对飞机所产生的气动力,从而更进一步抑制阵风对飞机的干扰。

图3 阵风减缓系统结构图Fig.3 Structure of the gust load alleviation system
样机由一个细长的外翼和机身组成,在外翼和机身的结合部存在一定的翼根弯矩,舵面的偏转也会产生附加弯矩。因此在减缓过载的同时也要兼顾到翼根弯矩的减缓。本文将控制分配技术应用于弯矩减缓的控制中,通过优化算法得到最佳的控制效果。
2.2 LQG/LTR控制器设计
在实际飞行过程中,飞机受到的干扰有两种:一是大气紊流引起的外部扰动,严重时会影响飞机的稳定性,因此需要设计鲁棒控制器;二是测量飞机状态量的传感器往往存在测量噪声,因此需要状态估计。
LQG控制器是从线性最优调节器(LQR)发展而来的,通过引入卡尔曼滤波器进行状态估计,使调节器能恢复全状态反馈时LQR控制所具有的鲁棒特性。但滤波器的引入可能会显著减小系统的稳定裕度,使系统在小扰动下即丧失稳定性。如果在控制策略中引入回路传输恢复技术(LTR),则可以使得LQG结构下的开环传递函数尽可能接近LQR问题的结果。
2.2.1 系统鲁棒性的衡量
从上面的叙述中可以看出,在控制器设计时,需要先设计一个符合鲁棒性要求的LQR控制器,这就涉及到多变量系统鲁棒性衡量的问题。图4为典型多输入多输出控制系统,系统的跟踪误差为:e(t)=r(t)-z(t)。

图4 典型多变量控制系统Fig.4 Typical multi-variable control system
经过进一步推导可得系统的跟踪误差为[10]:

式中:S(s)=(I+GK)-1,C(s)=GK(I+GK)-1,分别为系统的灵敏度函数和补灵敏度函数。通过文献[9]可知,为了增强系统的鲁棒性,在低频段S(s)应取小,在高频段C(s)应取小,即S(s),C(s)的大小可以衡量系统的鲁棒性。由多变量频域控制理论[11]可知,矩阵的奇异值可以衡量矩阵的大小,因此不妨定义矩阵的最大奇异值来衡量其大小,由此可得[10]:

2.2.2 LQG/LTR控制理论
带有干扰的飞行器纵向增广(包含作动器)模型状态方程为[4]:

式中:wg为阵风干扰;υ(t)为输出信号的测量噪声。假设wg及υ(t)均是零均值的平稳随机过程,这样的假设符合大气紊流和测量噪声的特点,其协方差矩阵为W和V。由LQG问题的分离定理知,可以独立处理最优状态估计和最优控制问题,然后将这两个问题合并在一起,就可得到LQG控制器的解,因此可得LQG控制器的控制结构,如图5所示。

图5 LQG控制结构图Fig.5 Structure of the LQG control system
图中,被控对象和控制器的传递函数为:

LQG控制器的设计是通过独立地求解两个Riccati方程来实现的[4-5,9]。但实际上状态观测器的引入会严重影响控制器的稳定裕度,破坏LQR反馈控制的鲁棒性。为了解决这一问题,提出了LTR技术。
令W'=q W,当q→∞ 时,可以证明LQG控制问题的开环回路增益将趋近于LQR问题的开环回路增益。

上式中q的值不应选得过大,否则会引起截断误差,并破坏总系统的稳定性。综上所述,LQG/LTR控制器具体设计步骤如下[4]:
(1)设计LQR控制器,根据对系统性能和鲁棒性的要求调整加权矩阵Q和R,使系统开环回路增益的奇异值曲线有满意的形状。
(2)应用LTR技术设计Kalman滤波器,在系统输出端恢复回路传递函数。
3 控制分配算法
假设阵风减缓输出(虚拟控制量)为η,控制分配的输出为u,控制分配的目的就是使得f(u)=Bau-η在接近零的前提下,机翼的翼根弯矩最小,其中 u= [δ1,δ2,δ3,δ4]T。其本质是通过优化算法使得飞机的多个操纵面重新协调偏转,在控制能力不变或接近的前提下实现控制目标。
由于飞机上没有测量翼根弯矩的传感器且翼根弯矩的实际求解方法也比较麻烦,不便于仿真,考虑到各个舵面所产生的滚转力矩和引起的附加翼根弯矩是成正比的,因此本文使用各个舵面的滚转力矩系数来估计其引起的翼根弯矩变化量。某个舵面产生的滚转力矩为:

式中:C¯L为力矩系数。飞机的滚转力矩是通过左右机翼两边的舵面差动偏转得到的,因此单边舵面产生的滚转力矩为0.5Lδ。因此4个舵面的总翼根弯矩的变化量为:

考虑到飞机在巡航飞行过程中,机翼本身就有一向上的翼根弯矩M0,因此机翼的实际翼根弯矩即优化目标函数为:

实际上舵面偏转产生的弯矩不可能大于M0,因此J>0。考虑到舵面的饱和限制,则ulow≤u≤uupp(uupp,ulow为舵面偏转的上下限)。
综上所述,可将控制分配写为如下带约束的线性规划问题:

式中:a为一接近于零的向量,需要通过仿真确定。式(14)本质上是带约束条件的最优问题,可通过线性规划求解。
4 仿真结果及分析
在Matlab的Simulink中以某飞翼飞机为例进行仿真,采用飞机的小扰动仿真模型,取配平点为:高度H=2 000 m,速度V=150 m/s,紊流强度σt=2 m/s,紊流尺度L=760 m。控制分配只是对舵面偏转量的重新分配,因此在设计LQG控制器时,可以先忽略掉控制分配模块的存在,将飞翼飞机的5个俯仰控制面看成一个升降舵,即为虚拟控制量,作为控制分配模块的输入量。
图6给出了LQR状态反馈和利用LTR技术恢复的LQG开环奇异值曲线。由图可知,所设计系统的低频段开环增益大,高频段开环增益小,符合鲁棒性的要求,并且相比于LQR状态反馈,基于LQG/LTR所设计的奇异值曲线的高频段衰减得更快,因此恢复后系统的鲁棒性要优于原状态反馈系统,达到了设计要求。

图6 奇异值曲线Fig.6 Curves of the singular value
图7 给出了三种情况下法向过载的响应曲线。由图可以明显看出,加入阵风减缓系统后,系统的法向过载减缓了大约35.15%;加入控制分配后,减缓了大约30.55%,几乎对控制效果没有影响。

图7 法向过载响应曲线Fig.7 Response of the normal load
图8 给出了控制分配前后翼根弯矩的响应曲线。由图可以明显看出,加入控制分配后翼根弯矩的变化幅值得到了明显的减缓,大约减缓了10%。
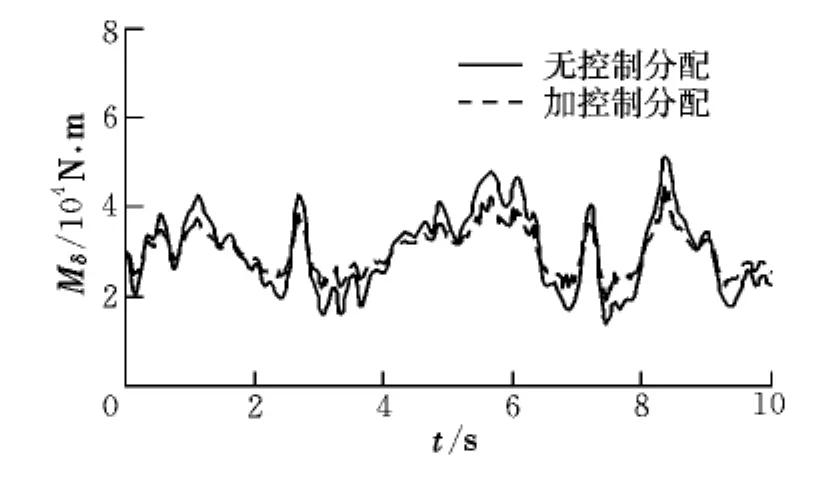
图8 翼根弯矩响应曲线Fig.8 Response of the wing root bending moment
5 结束语
本文在传统LQG/LTR控制器的基础上,加入控制分配技术,对某多操纵面飞翼飞机进行了阵风减缓系统研究。Matlab仿真结果表明,运用该方法设计的阵风减缓系统不仅能够有效地减缓阵风引起的飞机法向过载,也能够减小飞机的翼根弯矩,减轻翼根的结构疲劳,增加飞机的使用寿命。
[1] 袁刚,李爱军,王长青,等.多舵面大型民机阵风减缓系统设计[J].飞行力学,2011,29(4):65-67.
[2] 张军红,李振水,詹孟权,等.阵风载荷减缓系统LQG/LTR多变量控制器设计[J].飞行力学,2007,25(4):33-36.
[3] 钱小波.民用飞机阵风缓和控制系统的设计方法与仿真研究[D].上海:复旦大学,2011.
[4] 肖华,王立新.基于LQG/LTR方法的鲁棒飞行控制系统设计[J].飞机设计,2007,27(4):39-42.
[5] 许晓燕,陈澜.基于LQG/LTR的舰载飞机纵向自动着舰控制系统设计[J].科学技术与工程,2012,12(23):5837-5840.
[6] Dillsaver Matthew J,Cesnik Carlos E S,Kolmanovsky Ilya V.Gust load alleviation control for very flexible aircraft[C]//AIAA Atmospheric Flight Mechanics Conference.Reston:AIAA,2011.
[7] Vartio Eric,Shimko Anthony.Gust load alleviation flight control system design for a sensorcraft vehicle[C]//26th AIAA Applied Aerodynamics Conference.Reston:AIAA,2008.
[8] 文传源.现代飞行控制[M].北京:北京航空航天大学出版社,2004:184-187.
[9] Britt Robert T,Jacobson Steven B,Arthurs Thomas D.Aeroservoelastic analysis of the B-2 bomber[J].Journal of Aircraft,2000,37(5):745-752.
[10]章卫国,李爱军,李广文,等.现代飞行控制系统设计[M].西安:西北工业大学出版社,2009:79-110.
[11]高黛陵,吴麒.多变量频域控制理论[M].北京:清华大学出版社,1998:236-239.
