GNSS 接收机锁相环最佳环路带宽的选取*
2015-12-25马冠一
张 杰,马冠一
(1.中国科学院 国家天文台,北京 100012;2.中国科学院大学,北京 100049)
1 引言
在全球卫星导航系统(Global Navigation Satellite System,GNSS)接收机中,锁相环已经广泛应用于载波信号的跟踪。环路滤波器是锁相环的重要组成部分,可以减小由于输入信号噪声引起的相位误差并平滑鉴相器泄漏的高频分量,对锁相环跟踪精度、稳定性有重要影响。环路带宽(又称等效噪声带宽)是环路滤波器设计中的重要参数,对环路噪声(包括热噪声和晶振噪声)特性和环路动态特性有决定性影响。文献[1-3]介绍了环路滤波器的基本原理及模拟实现的参数设计。文献[4-7]给出了二阶及三阶锁相环环路滤波器数字化的实现方式,但未给出最佳环路带宽值的选取方式。文献[2,8]分析了环路跟踪性能与环路滤波器参数的关系,指出环路带宽存在一个最佳取值,使总的环路跟踪误差最小,但没有给出具体表达式。文献[9]给出了陆地应用的GPS 接收机中载波环的环路带宽典型取值,但未给出适用于一般接收机的最佳环路带宽取值推导过程及表达式。文献[10-12]提出了基于卡尔曼滤波器或扩展卡尔曼滤波器的载波跟踪环路,具有较好的跟踪性能,但算法实现较为复杂。
本文针对环路跟踪误差的组成,分析了环路带宽的取值对于锁相环两个最重要的误差源——环路热噪声误差和晶振阿伦偏差的影响,基于便于实现的经典二阶锁相环,给出了适用于低动态下使锁相环总的跟踪误差最小的最佳环路带宽的理论表达式,并通过实际硬件测试平台进行了验证。
2 锁相环结构
锁相环在GNSS 接收机中的作用是复现与输入同频同相的载波信号,完成相干解调。其工作方式是通过闭环反馈对输入信号的载波进行跟踪,其结构框图如图1 所示,包括鉴相器、环路滤波器和压控振荡器(Voltage Controlled Oscillator,VCO)。鉴相器用来检测输入信号与本地载波之间的相位差并输出误差信号;环路滤波器用来对鉴相器的输出进行低通滤波,滤除鉴相器输出的高频分量,防止噪声对环路的误调节,向压控振荡器传递调整信号;压控振荡器在环路滤波器输出的控制信号作用下使输出载波频率向输入信号靠近,直至消除频率差和相位差而锁定。

图1 锁相环结构Fig.1 The structure of phase-locked loop
3 环路滤波器设计
环路滤波器常用的设计方法是借助于模拟域环路滤波器的相关理论确定传递函数,再通过双线性变换将其映射到数字域,以便于数字化实现[4-5]。
设计环路滤波器首先需确定其阶数。环路传递函数分母中的最高次幂的次数称为环路的阶数,常用的环路滤波器有一阶和二阶。对于整个锁相环而言,影响锁相环传递函数阶数的因素包括环路滤波器和压控振荡器,由于压控振荡器引入了一阶,所以通常所说的锁相环的阶数等于环路滤波器的阶数加一[2]。根据线性时不变系统稳定性条件[13],锁相环阶数为三阶以下时环路是无条件稳定,而三阶以上锁相环的稳定需要一定的条件[16]。兼顾稳定性与性能,本文主要针对二阶环进行讨论。
典型的二阶锁相环采用一阶理想积分滤波器,为了便于数字电路实现,通常采用双线性变换[4]将模拟域的传递函数 F (s) 转换为数字域的传递函数 F (z)[5]:

式中,K0为VCO 控制增益;Kd为鉴相器增益,归一化处理之后Kd=1;ζ 为阻尼系数,通常取为0.707;T 为环路积分时间;ωn为锁相环环路自然角频率。
其实现结构如图2[5]所示。
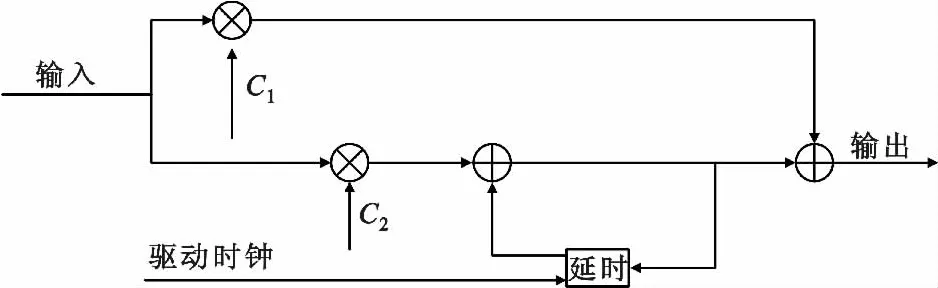
图2 一阶数字环路滤波器框图Fig.2 The block diagram of one order digital loop filter
由式(2)、(3)可见,VCO 控制增益K0、阻尼系数ζ、积分时间T 确定之后,再确定环路自然角频率ωn,即可确定环路滤波器的结构。
4 最佳环路带宽值
对于一阶理想积分滤波器,环路自然角频率ωn与环路带宽BL满足如下关系[5]:

环路带宽定义为[2,15]

式中,H (2πf)指锁相环环路滤波器的频率响应。
环路带宽BL的值影响环路跟踪性能:环路带宽越窄,环路对热噪声滤除效果越好,频率估计误差越小,但动态性能较差;环路带宽越宽,热噪声误差越大,但对载体动态适应性越好,同时对于滤除阿伦方差产生的振荡器(晶振)噪声越有利[4,16]。综合以上因素考虑,环路带宽存在一个最佳取值,使总的环路跟踪误差最小。下面通过推导给出具体表达式。
对于GNSS 接收机跟踪环路,其1σ 经验门限[4]:

式中,σtPLL表示鉴相器热噪声造成的1σ 跟踪误差(单位°)。对于经典的反正切鉴相算法,热噪声误差计算公式[4,15]为

式中,BL表示环路带宽(单位Hz),C/N0表示载噪比,T 表示积分时间(VCO 校正周期)。
θA表示由阿仑偏差引起的振荡器颤动(单位°)。经过二阶锁相环路之后,由阿仑偏差引起的振荡器颤动可表示如下[4,16]:

式中,σA为晶振短期阿伦偏差,对于普通温补晶振σA=1 ×10-9,fL为载波频率。
σv表示由振动引起的振荡器1σ 颤动误差(单位°),由外界振动环境和载频决定[4],与环路本身设计参数无关,此处不作讨论。
θe表示由载体运动造成的动态应力误差[4]。
对于绝大多数地面应用,载体加速度和加加速度值很小,动态应力误差不作考虑,因此,结合式(6)~(8),得到二阶锁相环1σ 跟踪误差为

对于式(9),σPLL2可以看作是BL的函数。对BL求导,当时,σPLL2取得最小值。在低动态条件下,二阶锁相环最佳环路带宽(单位Hz)为

5 实验测试与结果
在实验测试中,测试系统组成如下:载波生成系统由信号源和噪声源构成,数字接收基带由FPGA芯片、温补晶振(TCXO)和A/D 接口电路组成的硬件平台实现。测试系统组成如图3 所示。
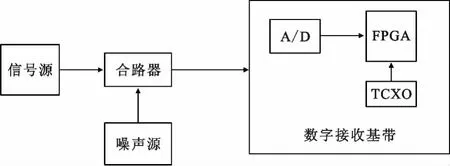
图3 测试系统组成框图Fig.3 The block diagram of the test system
信号源型号为Agilent E4438C,噪声源型号为SU4300。FPGA 的型号 是 Xilinx Sparten3 XC3S1400AN,A/D 芯片的型号是AD9288,温补晶振频率为68 MHz。载波锁相环在FPGA 芯片上实现,其结构如图4 所示。

图4 锁相环组成框图Fig.4 The block diagram of PLL
信号源产生中频为8 MHz的载波,A/D 采样芯片在68 MHz的时钟驱动下对输入信号进行采样,通过并行总线传至FPGA 芯片,与本地数控振荡器(Numerically Controlled Oscillator,NCO)生成的两路正交载波(cos&sin)进行相乘,相乘通过积分器积分后进入鉴相器,积分时间约为1 ms。反正切鉴相运算采取坐标旋转数字计算(Coordinate Rotation Digital Computer,Cordic)算法实现,鉴相结果通过环路滤波器,环路滤波器结构如图2 所示。环路滤波器输出频率控制字给本地NCO 生成本地载波,NCO 采取直接数字频率合成(Direct Digital Synthesizer,DDS)方式实现,相位累加器长度为33。
当载噪比C/No分别为50 dB·Hz、55 dB·Hz时,取不同的环路带宽值,硬件平台实测的鉴相器输出的1σ 相位差如图5 所示。
由图5 和图6 可见,实测误差结果与理论误差值变化趋势一致,证明了本文关于低动态下锁相环最佳环路带宽取值推导的正确性。但与理论误差值比较,实测结果误差绝对值较大,原因是采样量化误差及FPGA 实现过程中的变量长度舍入误差导致,不影响最佳带宽的取值判断。
6 结束语
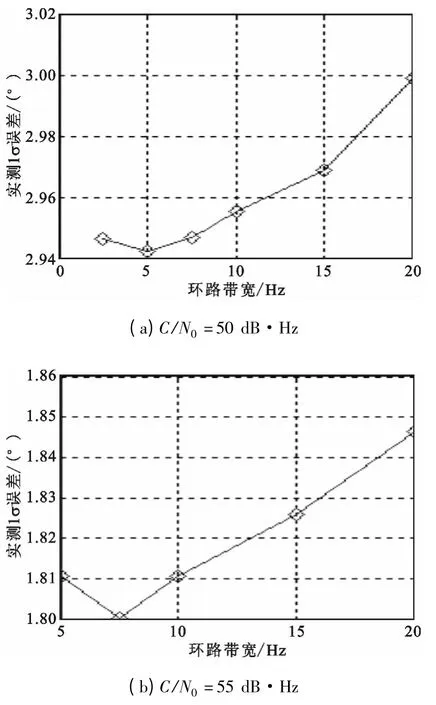
图5 鉴相器实测结果Fig.5 The measured results of phase discriminator
图6 为根据式(10)计算得到的理论值。
锁相环是GNSS 接收机的重要组成部分,环路带宽的取值对锁相环载波跟踪的动态和噪声性能有重要影响。本文介绍了锁相环和环路滤波器的结构和基本原理,分析了环路带宽的取值对于锁相环两个最重要的误差源——环路热噪声误差和晶振阿伦偏差的影响,在此基础上,得出了适用于低动态下二阶环锁相环、使环路总的跟踪误差最小的最佳环路带宽的理论表达式,并通过实际硬件接收平台验证了其正确性。本文的结论不仅可以作为GNSS 接收机锁相环环路滤波器设计的参考,也适用于一般的载波跟踪环设计。
本文只针对载体静止或低动态条件下锁相环路的最佳环路带宽取值进行了分析,未考虑接收机跟踪环路在高动态条件下的动态应力误差。当载体动态较大时,根据本文的分析方法求解最佳环路带宽过程中会出现高次方程,针对高次方程的求解比较困难。对于高动态下的锁相环路,需增加环路阶数,并结合锁频环辅助,或者采取更为复杂的卡尔曼滤波算法。

图6 理论计算结果Fig.6 The theoretical calculation results
[1]郑继禹,张厥盛,万心平,等.锁相技术[M].2 版.西安:西安电子科技大学出版社,2012:5-70.ZHENG Jiyu,ZHANG Juesheng,WAN Xinping,et al.Phaselock Techniques[M].2nd ed.Xi'an:Xidian University Press,2012:5-70.(in Chinese)
[2]Best R E.锁相环设计、仿真与应用[M].5 版.李永明,王海永,肖珺,等,译.北京:清华大学出版社,2007:27-33.Best R E.Phase-Locked Loops Design,Simulation and Applications[M].5th ed.Translated by LI Yongming,WANG Haiyong,XIAO Jun,et al.Beijing:Tsinghua University Press,2007:27-33.(in Chinese)
[3]Gardner F M.锁相环技术[M].3 版.姚剑清,译.北京:人民邮电出版社,2007:8-15.Gardner F M.Phaselock Techniques [M].3rd ed.Translated by YAO Jianqing.Beijing:People's Posts &Telecom Press,2007:8-15.(in Chinese)
[4]Kaplan E D,Hegarty C J.GPS 原理与应用[M].2 版.寇艳红,译.北京:电子工业出版社,2007:130-139.Kaplan E D,Hegarty C J.Understanding GPS Principles and Applications [M].2nd ed.Translated by KOU Yanhong.Beijing:Publishing House of Electronics Industry,2007:130-139.(in Chinese)
[5]张欣.扩频通信数字基带信号处理算法及其VLSI 实现[M].北京:科学出版社,2009:124-135.ZHANG Xin.Spread Spectrum Communication Digital Baseband Signal Processing Algorithms and VLSI Implementation[M].Beijing:Science Press,2009:124-135.(in Chinese)
[6]王宇舟.三阶锁相环环路滤波器参数设计[J].电讯技术,2008,48(9):51-55.WANG Yuzhou.Parameter Design for Loop Filter of Third- order PLL[J].Telecommunication Engineering,2008,48(9):51-55.(in Chinese)
[7]杜瑜.三阶数字锁相环环路参数的设计方法[J].电讯技术,2007,47(5):156-158.DU Yu.Parameters Design of the Third- order DPLL[J].Telecommunication Engineering,2007,47(5):156-158.(in Chinese)
[8]马志朋.二阶锁相环设计中环路参数的选择[J].火控雷达技术,1997,26(4):16-20.MA Zhipeng.Parameter Selection in Second-order phase-locked loop Design[J].Fire Control Radar Technology,1997,26(4):16-20.(in Chinese)
[9]Borre K,Akos D M.软件定义的GPS 和伽利略接收机[M].杨东凯,张飞舟,张波,译.北京:国防工业出版社,2009:79-90.Borre K,Akos D M.A Software-Defined GPS and Galileo Receiver[M].Translated by YANG Dongkai,ZHANG Feizhou,ZHANG Bo.Beijing:National Defense Industry Press,2009:79-90.(in Chinese)
[10]Jwo D J.Optimisation and sensitivity analysis of GPS receiver tracking loops in dynamic environments[J].IEEE Proceedings-Radar,Sonar and Navigation,2001,148(4):241-250.
[11]Psiaki M L,Jung H.Extended Kalman filter methods for tracking weak GPS signals[C]//Proceedings of the 15th International Technical Meeting of the Satellite Division of The Institute of Navigation.Portland,OR,USA:ION,2002:2553-2559.
[12]沈锋,贺瑞,吕东泽,等.基于卡尔曼滤波器的高动态GPS 载波跟踪环[J].宇航学报,2012,33(8):1041-1047.SHEN Feng,HE Rui,LYU Dongze,et al.Kalman Filter Based High Dynamic GPS Carrier Tracking Loop[J].Journal of Astronautics,2012,33(8):1041- 1047.(in Chinese)
[13]徐守时.信号与系统——理论、方法和应用[M].合肥:中国科学技术大学出版社,2003:366-368.XU Shoushi.Signals and Systems:Theory,Methods and Applications[M].Hefei:University of Science and Technology of China Press,2003:366-368.(in Chinese)
[14]Hamm C R,Flenniken W S,Berly D M.Comparative Performance Analysis of Aided Carrier Tracking Loop Algorithms in High Noise/High Dynamic Enviroments[C]//Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation.Long Beach,California:ION,2004:523-532.
[15]Knight M F.Ionospherie Seintillation Effects on Global positioning System Receivers[D].Adelaide:The University of Adelaide,2000:277-283.
[16]Detoma E,Bonafede L,Capetti P.Local Oscillator Contribution to Carrier-Phase Measurements in a GNSS Receiver[C]//Proceedings of the 41st Annual Precise Time and Time Interval Systems and Applications Meeting.Santa Ana Pueblo,New Mexico:[s.n.],2009:537-550.
