某型无人机全机仿真平台设计
2015-12-23路引,郭昱津,浦黄忠等
【信息科学与控制工程】
某型无人机全机仿真平台设计
路引1,郭昱津2,浦黄忠1,陈睿璟3
(1.南京航空航天大学无人机研究院, 南京210016;2.中电集团第二十八研究所,南京210007;
3.中航工业航空动力控制系统研究所,江苏 无锡210063)
摘要:无人机控制系统仿真是验证无人机控制策略、故障诊断和优化航线等的主要方式。针对某型无人机的研制需求,分析了无人机仿真系统的原理和仿真信息的传递机制,提出并设计了基于全机仿真的无人机飞行控制仿真平台,包括:仿真计算机系统、飞行控制系统、地面测控系统和视景模拟系统。并将此仿真平台应用于某型无人机飞行控制系统的全机仿真试验中,试验和测试结果表明:该仿真平台设计合理并满足飞行仿真要求,具有一定的工程应用价值。
关键词:无人机;仿真平台;分系统;软件设计
收稿日期:2014-11-02
作者简介:路引(1988—),男,硕士,实习研究员,主要从事无人机飞行力学与飞行控制研究。
doi:10.11809/scbgxb2015.05.032
中图分类号:V279+.2;TJ8
文章编号:1006-0707(2015)05-0123-04
本文引用格式:路引,郭昱津,浦黄忠,等.某型无人机全机仿真平台设计[J].四川兵工学报,2015(5):123-126.
Citation format:LU Yin, GUO YU-jin, PU Huang-zhong, et al.Design on Full Machine Simulation Platform for a Certain UAV[J].Journal of Sichuan Ordnance,2015(5):123-126.
Design on Full Machine Simulation Platform for a Certain UAV
LU Yin1, GUO YU-jin2, PU Huang-zhong1, CHEN Rui-jing3
(1.Research Institute of Unmanned Aerial Vehicle, Nanjing University of Aeronautics and
Astronautics, Nanjing 210016, China; 2.The 28th Research Institute of China Electronics
Technology Group Corporation, Nanjing 210007, China; 3.Research Institute of Aviation
Motor Control System, Aviation Industry Corporation of China, Wuxi 210063, China)
Abstract:The control system simulation for UAV is the main way to verify its control strategy, fault diagnosis and optimal route etc. In view of the development needs for a certain UAV, we analyzed the theory of simulation system and transmission mechanism of simulation information, and proposed and designed the flight control simulation platform based on the whole machine simulation, which including: computer simulation system, flight control system, the measurement and control system and visual simulation system. The simulation platform was applied to the whole machine simulation test for a certain UAV. The test results show that the design of the simulation platform is reasonable and satisfied with the requirements of flight simulation, and has further engineering applications value.
Key words: UAV; simulation platform; subsystem; software design
无人机控制系统仿真主要为无人机设计和控制策略研究提供飞行试验平台。在无人机的设计、研制和使用过程中,无人机飞行控制系统的半物理仿真作为飞行前和飞行后的实时过程模拟是一个重要的性能评估手段和故障的再现手段[1]。针对某型无人机飞行控制系统地面半实物仿真系统的要求,设计和开发了基于全机仿真的无人机飞行控制仿真系统试验平台,全机仿真是建立在半物理仿真基础上的全机系统检测,将飞控和航电系统的全部实物都安装在无人机的机身内,与飞行过程中的装机条件完全一致,将无人机放置在三自由度的仿真转台上,建立合适的无人机仿真模型,进行包括传感器、执行机构(伺服舵机)、机载航电系统在内的实物在回路仿真[2]。
1仿真系统原理
无人机全机仿真系统由无人机整机系统、飞行动力学仿真计算机系统、地面测控计算机系统、视景模
拟计算机系统、数据电台、舵机测角装置和三自由度姿态运动模拟平台等组成,其系统组成如图1所示。
惯导测量组件、飞控计算机、伺服舵机等均为无人机真实飞行时的机载设备,无人机整机安装在三自由度姿态模拟转台上。三自由度模拟转台作为飞行仿真系统中的关键物理效应设备与飞行仿真计算机系统、飞行动力学数学模型、舵机测角装置、操纵与控制装置一起构成无人机的地面飞行过程实时仿真回路。操纵员通过操纵控制装置操纵与控制无人机的飞行过程,通过仿真控制和管理计算机监测无人机飞行状态,并通过视景计算机系统模拟的真实飞行场景观测无人机飞行[3]。
三自由度模拟转台激励惯导装置,惯导信息作为飞控计算机的输入,经过控制解算驱动舵机运动,舵机测角装置实时采样验证飞机的舵面运动信号,通过仿真计算机解算验证无人机空中的飞行运动特性,产生转台运动的激励信号,从而形成闭环仿真回路。

图1 无人机仿真系统原理框图
2仿真信息传递机制
仿真系统各设备的信息传递包括了物理接口、模拟电压、串行通讯、光纤通讯、并行接口和无线通讯等[4]。
无人机跟地面测控系统的实时通讯主要利用地面无线数据电台完成上行和下行数据传输。通过分别设置信道上、下的工作频率,采用机载天线完成机载遥测信号的接收和遥控指令的发送。全双工电台作为测控链路使用时,收发可以同时进行。电台波特率为19 200 bps,数据位8位,无校验位,上行每帧长为18 Byte。下行帧长48 Byte,采用主副帧结构,主帧40 Byte,副帧8 Byte。
机上飞控系统仿真主要由飞控计算机的舵偏信号经物理接口转换成电压信号驱动舵机偏转,舵机测角装置由码盘测得实时舵面偏角由7122并口卡采集转换成数字信号,仿真计算机实时接收偏角信号并通过动力学模型解算,计算出的姿态角信号由光纤传输到转台控制计算机,信号经物理接口功率放大驱动三自由度模拟转台运动,转台带动无人机上惯导和陀螺装置运动,信号由RS232串口送入飞控计算机,从而实现了各仿真效应设备和无人机之间的闭环信息传递。同时,由飞控计算机解算的飞行状态信息由RS232串口传输到机载无线数据电台完成下行数据发送。
地面测控台通过USB接入操纵与地面控制装置,并实时将控制信息由RS232串口传输到视景计算机和地面无线数据电台,实现三维视景显示和上行数据的发送。
为实现信号有效传输,各通讯方式都需要配备合适的接口卡。仿真计算机接口需配置6通道24位数字I/O口、10M以太通讯网络和光纤反射式内存。地面操控计算机需配置1个USB接口和2个独立RS232串口。转台控制计算机需配置10M以太通讯网络和光纤反射式内存。
3仿真平台分系统设计
3.1仿真计算机系统
对仿真计算机主要有4方面的要求:速度、精度、灵活性和经济性。由于本仿真平台要求实时承担飞行动力学方程的求解和各种实际飞行环境的模拟,所以对速度的要求很高[5-6]。另外,仿真计算机要与其他外部物理效应设备进行通讯,进行信号转换和传递,如 A/D、D/A 转换和数字量的 I/O 以及开关量的传递。为了实现功能的扩展,仿真计算机选用台湾研华工控公司的高档工业控制计算机。
仿真界面如图2所示,该软件包括仿真参数和仿真参数设置2个对话框。其中,仿真参数对话框包括仿真数据显示、动态航迹显示、飞行姿态仪表和操作按钮。仿真参数设置对话框主要设置飞机的起飞点、切点和起飞方式等。

图2 仿真和仿真设置界面
3.2飞行控制系统
飞行控制系统是整个系统的核心,担负着系统数据的采集、余度管理和控制律的计算等重要任务,该地面仿真平台中飞行控制器选用TI公司的高性能处理芯片TMS320F28335作为飞控计算机的处理器芯片[7]。该芯片是一款TMS320C28X系列浮点DSP控制器,具有精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D 转换更精确快速等优点,并具有TI公司所开发的功能强大的CCS软件平台。
飞行控制软件按照软件工程设计准则,采用模块化结构进行设计,使用C语言编程。飞行控制软件按功能可分为4个部分,如图3所示,分别为传感器信号采集模块、控制律解算模块、控制信号输出模块以及无线数据通信模块。为了提高程序的可维护性和可移植性,将每个模块独立封装。当某个模块性能和参数需要调整时,只需配置相应的模块即可。
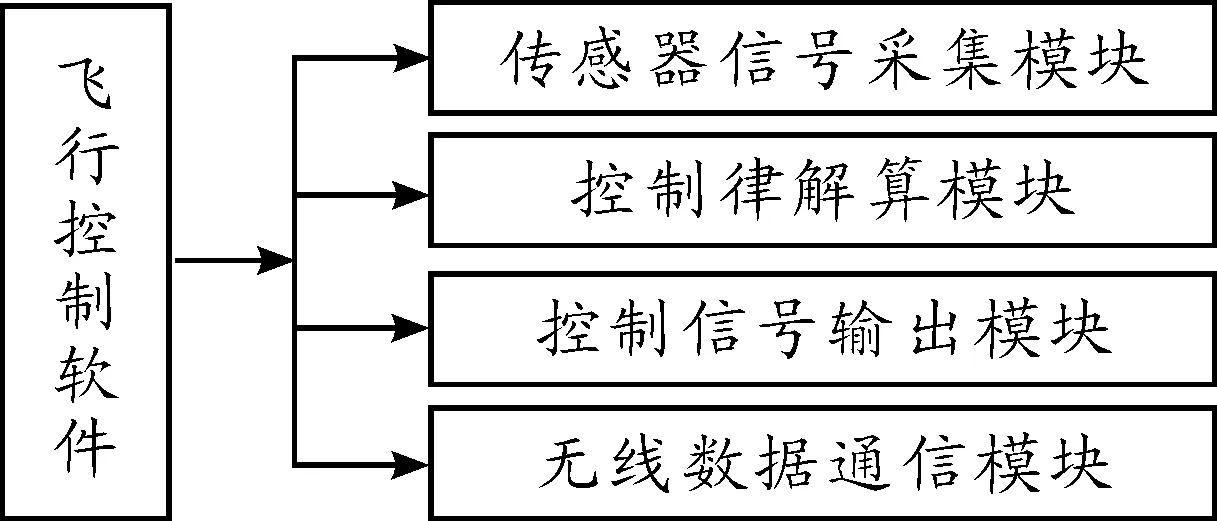
图3 飞行控制系统软件总体结构
3.3地面测控系统
选择研华工业控制计算机作为地面测控系统的测控计算机。地面测控软件采用 VC++6.0 开发,采用 Windows 可视化编程技术实现[8],仿真系统中,实时遥控遥测软件需具有以下功能:
1) 在无人机的飞行过程中,实现地面操纵者的控制指令的上行发送和遥测数据的实时下行接收;
2) 实现飞行参数的实时显示,并可完成过程曲线的实时绘制;
3) 实现人机交互界面和无人机的操纵与控制;
4) 完成飞行数据的保存,为后续的研究工作提供数据分析平台。
根据软件所要完成功能的要求,在VC++开发平台下,采用模块化的思想对软件进行总体设计。按照功能划分,主要分为用户界面、串口通讯和数据存储3个模块,各模块之间的关系如图4所示。按照数据模块划分,主要分为遥控、遥测和窗口刷新3个模块,其系统图如图5所示。

图4 遥控遥测软件功能模块
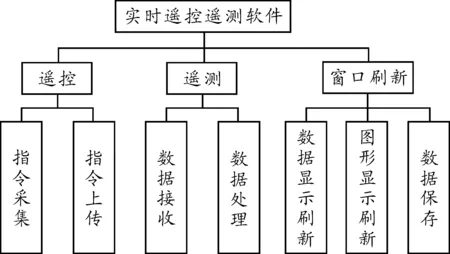
图5 遥控遥测软件数据模块
实时遥控遥测软件是操纵人员跟无人机交互的重要窗口,必须具备友好的人机交互能力。软件设计了基于NI Mesaurement Studio AppWizard的友好界面,如图6所示。

图6 实时遥控遥测软件界面
由图6可以看出,界面左侧以文本的方式显示了飞机的飞行状态和参数值。右侧上部分是飞行仪表和三维飞行图,更为直观和立体的方式显示飞行姿态,以方便操纵人员实时监控飞机的飞行状态。右侧中部分是遥测指令,分为指令盘和操纵杆2个部分,操纵人员可以通过指令盘或者操纵杆改变飞机飞行状态,其中操纵杆的指令采集采用USB接口的操纵杆、脚踏式方向舵、油门组合,不需要专门的数据采集卡,软件中需安装好底层驱动就可以使用。右侧下部分是GPS传感器、遥控遥测和火工品等的状态显示灯,如GPS正常,则绿灯显示,失效则红灯显示,该部分能很好地监测飞机上重要机载设备的工作状态。设定每100ms刷新一次,因此设定定时器的周期为100ms。每次定时中断到来时,对水平仪、航向仪的显示和飞行参数列表中的数值进行一次刷新。
3.4视景模拟系统
视景模拟是飞行仿真系统中一个重要的组成部分,为操控员提供了实际飞行任务中的虚拟环境。其主要利用三维动画建模软件和视景仿真软件,生成模型机飞行的模拟影像和外部的环境景象[9-10]。视景模拟计算机通过RS232串口从地面测控计算机实时接收模型机的飞行数据,即为模型机的动作驱动数据,依据这些数据,使得模型机模拟真实飞机外场飞行。
实时视景系统需使用专门的工具软件进行开发,根据功能的不同分为三维建模软件、视景仿真软件等。在该模型机飞行仿真系统的视景模拟中将采用以VC++、OpenGL和MilkShape 3D为开发工具,使用场景优化和实时绘制技术实现飞行场景的模拟。利用OpenGL实现模型的变换、着色、纹理和动画相较于其他软件有很大的优越性,但是建立复杂模型相对困难很多,而MilkShape 3D在建立负载物体的模型上具有一定的优势,但是很难用程序进行控制。因此,在OpenGL中实现对其程序控制和动画,将两者有机地结合在一起使用,各取所长是一种高效快捷的开发方式,利用这2个软件平台开发了该仿真系统的视景模拟软件。主要实现步骤如下:
1) 利用MilkShape 3D建立无人机模型结构,并对模型进行纹理渲染和尺寸缩放使其接近真实的某型无人机。
2) 利用OpenGL中的函数对无人机模型纹理和材质等进行描述,形成模型参数列表并绘制成无人机模型。
3) 利用OpenGL实现飞行场景的描绘和渲染,包括飞行地形、天空、太阳和水的场景,并根据飞行需要进行场景视角的不同变换。
4全机仿真试验
无人机在地坐标系中根据飞行任务按预定航线飞行,其预定航线如图7所示。其横坐标为东向距离,纵坐标为北向距离,航迹图中1~15为飞行航点,无人机自主飞行时根据待飞航点沿预设航线飞行。
无人机飞行时,由测控台发送起飞指令,无人机由航点0起飞,飞行高度高于100m后进入自主飞行,在空中飞行2圈后由航点10开始,返航,最终返回到航点15,结束一次完整的飞行任务。无人机仿真飞行轨迹如图8所示。

图7 无人机飞行预设航线
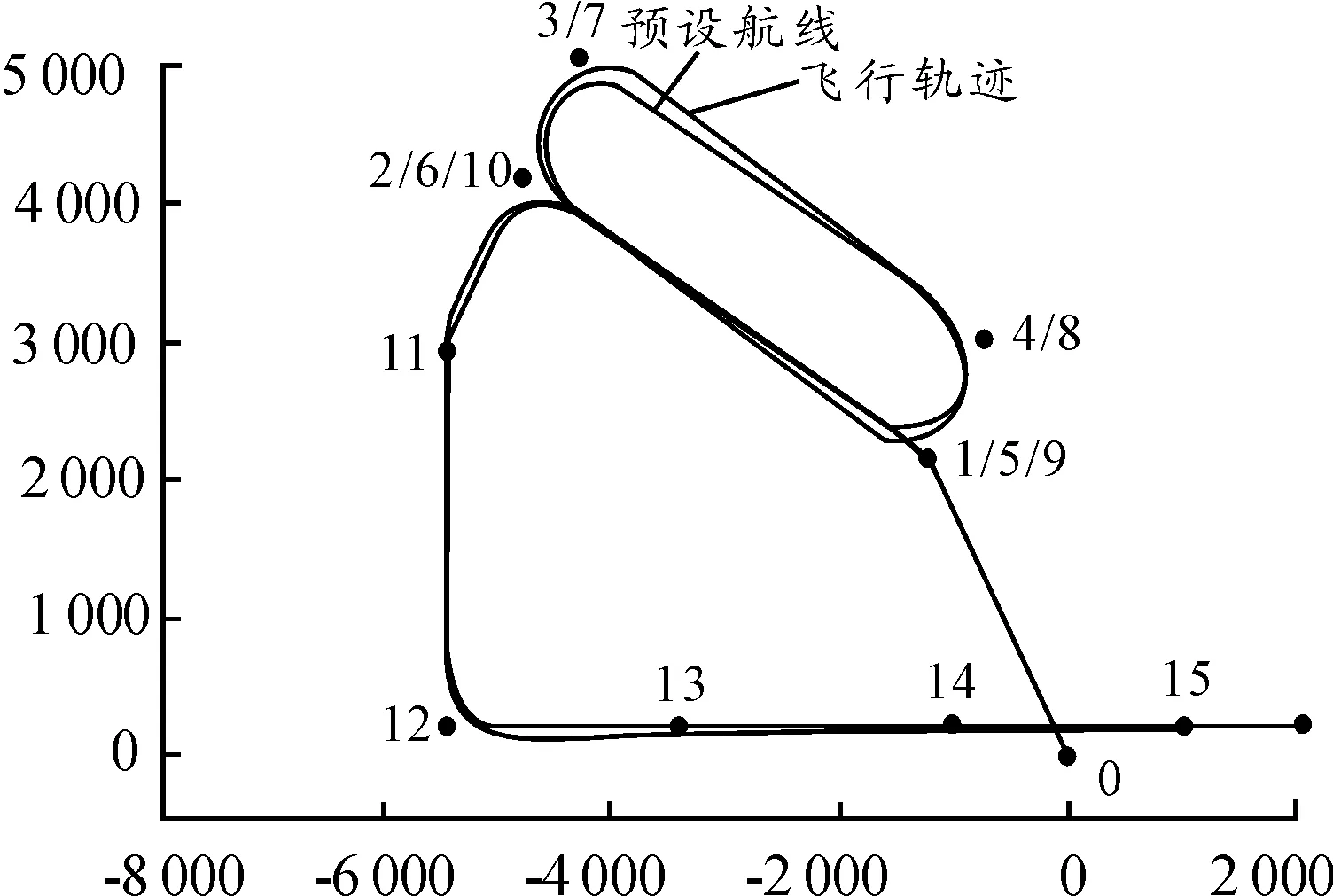
图8 无人机飞行轨迹
5结束语
无人机全机仿真是无人机研制过程中的重要组成部分,根据某型无人机研制需求,提出了全机仿真试验平台,测试和试验表明该平台设计合理,达到了预期的目的,能够很好地验证无人机飞行控制策略、故障诊断和优化航线等。
参考文献:
[1]Fantinutto R,Guglieri G,Quagliotti F B.Flight control system design and optimisation with a genetic algorithm[J].Aerospace Science and Technology,2005(4):73-80.
[2]翟彬.小型无人机飞控系统实时仿真技术研究[D].郑州:郑州大学,2007.
[3]薛明旭.基于Matlab的无人机飞行控制系统设计与仿真[J].电光系统,2010(4):40-43.
[4]Guillermo Heredia,Alfonso Duran,Anibal Ollero,et al.Modeling and Simulation of the HADA Reconfigurable UAV[J].Journal of Intelligent & Robotic Systems,2012,65(1/4):115-122.
[5]申文彬.半实物仿真系统实时通信技术的研究与开发[D].长沙:湖南大学,2006.
[6]LIANG Li-hua,CUI Dong-liang,ZHANG Song-tao,et al.Research on Moment Coupling and Compensation Control of Three-axis Ship Motion Simulation Turntable[J].Key engineering materials,2010,419/420:625-650.
[7]王斌.某小型无人机的飞行控制计算机的硬件设计[J].计算机测量与控制,2006,14(10):1355-1357.
[8]Bambang Rilanto Trilaksono,Rayan Triadhitama,Widyawardana Adiprawita.Hardware-in-the-loop simulation for visual target tracking of octorotor UAV[J].Aircraft engineering and aerospace technology,2011,83(6):407-419.
[9]姚旭寅.基于真实地形的无人机视景仿真系统设计与实现[D].南京:南京航空航天大学,2009.
[10]Gao Ying,Lei Lei,Wang Xiuliang,et al.Design and Realization of Virtual Scene System inUAV Electronic Warfare[C]//2009 International Conference on Information Engineering and Computer Science (ICIES 2009).[S.l.]:[s.n.],2009:1250-1253.
[11]陈卫,汤超君.基于状态的某型无人机系统维修研究[J].重庆理工大学学报:自然科学版,2014(1):102-104.
(责任编辑杨继森)

