六旋翼无人机在城市测量中的应用
2015-12-21甄宗坤范占永蔡东健
甄宗坤,范占永,蔡东健
(苏州工业园区测绘地理信息有限公司,江苏 苏州215000)
现阶段低空无人机城市测量技术体系由信息获取系统、信息处理系统两个部分组成。其中,信息获取系统是城市测量的实施基础和关键技术之一。
目前,城市测量的方式主要包括传统测绘、卫星遥感、大型飞机航拍、定点摄像、手持或车载式信息采集和小型无人机等[1]。传统测绘方式具有测量精度高、成果可靠、仪器设备价格低廉、人员素质要求低等特点,但也具有时效性差、作业效率低、人员成本大等缺点;而卫星遥感、大型飞机航拍等获取的是宏观信息,其更新周期长、时效性差且易受云雾的干扰,难以满足高精度城市测量信息获取的需要。
城市测量作业环境较为复杂,易受建筑物、植被、河流等因素的影响,传统测绘、卫星遥感、大型飞机航拍等作业方式此时很难满足对测量精度和作业效率的要求,且对于大型飞机航拍而言,作业成本、飞行高度和起飞场地等因素的限制,也很难广泛应用到城市测量中。低空无人机,尤其是旋翼无人机,其最突出的优点是能够垂直起降和空中悬停,既不受场地限制,更有利于获取清晰准确的影像信息[2]。六旋翼无人机可以通过反扭矩作用使飞行器扭矩平衡,而不需要专门的反扭矩桨,因此,这种飞行器设计非常简单,而且采用的多螺旋桨结构一方面可以提高负载能力,另一方面也可以提供多余度可靠性保证,即使一个电机停转也可以安全降落[3]。
1 六旋翼无人机系统组成及功能特点
1.1 系统组成
六旋翼无人机系统(图1)主要包含六旋翼无人机平台、飞控系统、多通道无人机遥控及接收系统、便携式地面站系统、无人机增稳云台系统和机载摄影测量等子系统组成。与其他类型旋翼机相比,其在体积、重量、目标特性、机动性、操作性等方面的优势更符合城市测量对无人机的要求[4]。
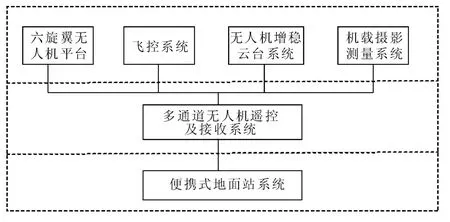
图1 六旋翼无人机系统
1.2 功能特点
六旋翼无人机属于多旋翼无人机的一种,同样具有垂直起降和空中悬停的功能。相比于四旋翼和八旋翼无人机,其在空重、荷载、稳定性、安全性等方面在城市测量中更具有一定的优势[5]。
(1)六旋翼无人机机体尺寸,相比于四旋翼和八旋翼无人机,更符合城市测量的要求,其机体的结构空间已足以搭载高精度的机载摄像机和各种传感器设备,性价比更具有优势。
(2)六旋翼无人机机身重量适中,增加的旋翼个数没有对总重量造成显著的增加,而提升的动力使得整个飞行器的推比重有了明显的提高,控制系统在系统推力裕量较大时又可以更好地克服城市侧风、机体抖动等干扰的影响。
(3)六旋翼无人机提供了多余度可靠性保证,相比于四旋翼机,它的每个旋翼不是必不可少的,从理论上讲,两个旋翼失去动力的情况下,六旋翼无人机仍具有保持自身姿态稳定的条件,此时,只需要从控制方面对飞行器的状态的进行调整,对总拉力进行重新分配,即可避免失控的情况出现,进而提高在整个无人机系统的可靠性。
2 关键技术分析
六旋翼无人机机载城市测量信息获取系统的功能模型是由地面站系统根据测量区块信息进行航迹规划,通过机载摄影测量系统进行信息采集,所采集的影像信息可直接存储至机载大容量存储器,也可通过无线传输设备将信息传输至数据节点或终端。其核心结构是六旋翼无人机机体、飞行控制模块、无线数据传输模块和机载摄影测量系统,涉及的关键技术主要有无人机飞行控制技术、无线数据传输技术、机载摄影测量技术和无人机航迹规划等[6]。
2.1 无人机飞行控制技术
六旋翼无人机作为一种微型飞行器,是一个非线性、多变量、高度耦合的欠驱动系统,其在飞行过程中不仅易受由自身物理特性(空气动力特性、重力特性、陀螺效应和旋翼惯量矩等)限制的影响,还很容易受到气流等外部环境的干扰,因此,飞行控制技术对保证无人机稳定性、安全性至关重要[7]。六旋翼无人机的飞行控制系统包括三大部分[8],分别为姿态控制、位置控制和高度控制。姿态控制通过由陀螺仪、加速度计、磁强计输出的角速度、加速度、磁强信息融合得到的姿态估计获取反馈信息,对反馈信息进行计算输出三个姿态控制参量,这三个控制参量参与最终的转速分配,直接影响着电机转数的变化,进行完成无人机的姿态控制;位置控制包括对无人机位置和速度的控制,通过GPS与光流传感器获取位置信息、速度信息,进而实现无人机的位置控制;高度控制包括对无人机高度和爬升速度的控制,其通过GPS、超声测距传感器、加速度计、气压计数据进行融合得到的数据获取高度反馈信息,通过高度反馈信息计算相应的控制参量,将其输入到转速分配中,通过改变旋翼转速实现对高度的控制[9]。
2.2 无线传输技术
无人机需要传输的信息包括无人机飞行姿态信息、航拍影像及各类传感器的采集信息等,对于时效性要求不高的数据可以采用大容量存储器进行存储,而对于要求实时传输的数据,必须及时传输,以便对无人机进行调节控制。在城市测量中,无人机测量系统无线传输技术还面临着诸多问题。第一,传输速率相对较低,难以实现远距离、高效率的实时传输;第二,城市测量中无人机的作业环境非常复杂,面临着复杂的电磁干扰,需要选择合适的信道编码对获取的信息进行差错控制,目前无人机数据传输的抗干扰能力、数据的安全性和可靠性还有待进一步提高;第三,六旋翼无人机属于微型无人机,限制于其荷载能力,往往只能搭载1~2块高性能锂电池,然而为了提高无人机的空中续航时间,提高作业效率,还需要解决无线传输设备的功耗问题[10]。
2.3 机载摄影测量技术
目前,无人机搭载的摄影测量设备往往是传统的微单或单反相机,其成像质量直接决定了测量的精度,是无人机城市测量系统的最为关键的技术。另外,在获取高精度的影像信息的同时,为了进一步提高测量精度,多传感器、多维度数据的融合技术也至关重要。
2.4 无人机航迹规划
航迹规划是指在特定的约束条件下,寻找从起始点到目标点并满足某种性能指标的最优飞行轨迹,是无人机自主控制飞行最重要的功能特征。主要是按照作业任务要求,根据无人机特性和续航时间进行航线设计,控制无人机的飞行高度、飞行距离和转弯半径等,以满足不同城市测量任务对像片航向、旁向重叠度的要求,并进一步实现多任务跨区域的航迹规划。
3 应用实例
本实验旨在测试无人机航测系统的作业精度、作业效率、系统的稳定性和可靠性。实验选择XH-HE840型六旋翼无人机,其性能指标详见表1所示,可全自主飞行,一键起降落,垂直起降,不受场地限制,配备的增稳云台也大大提高了航测系统的稳定性,无人机搭载的航测设备选择索尼NEX-7微单摄像机,像素大小PZ=0.0039mm,人工固定焦距f=16mm,像幅L×W=6000mm×4000mm。
实验采用XH-HE840六旋翼无人飞行器进行1∶500地形图采集的实验,天气晴朗,风力在四级左右。飞行器飞行时间约10min,飞行高度约200m,飞行范围为300m×400m,现场均匀布设16个像控点,如图2所示。
后期处理时,由于2#和7#点被车遮挡,在图像匹配后用其他分散的8个像控点进行全图平差,参与平差像控点的各方向点位中误差如表2所示。
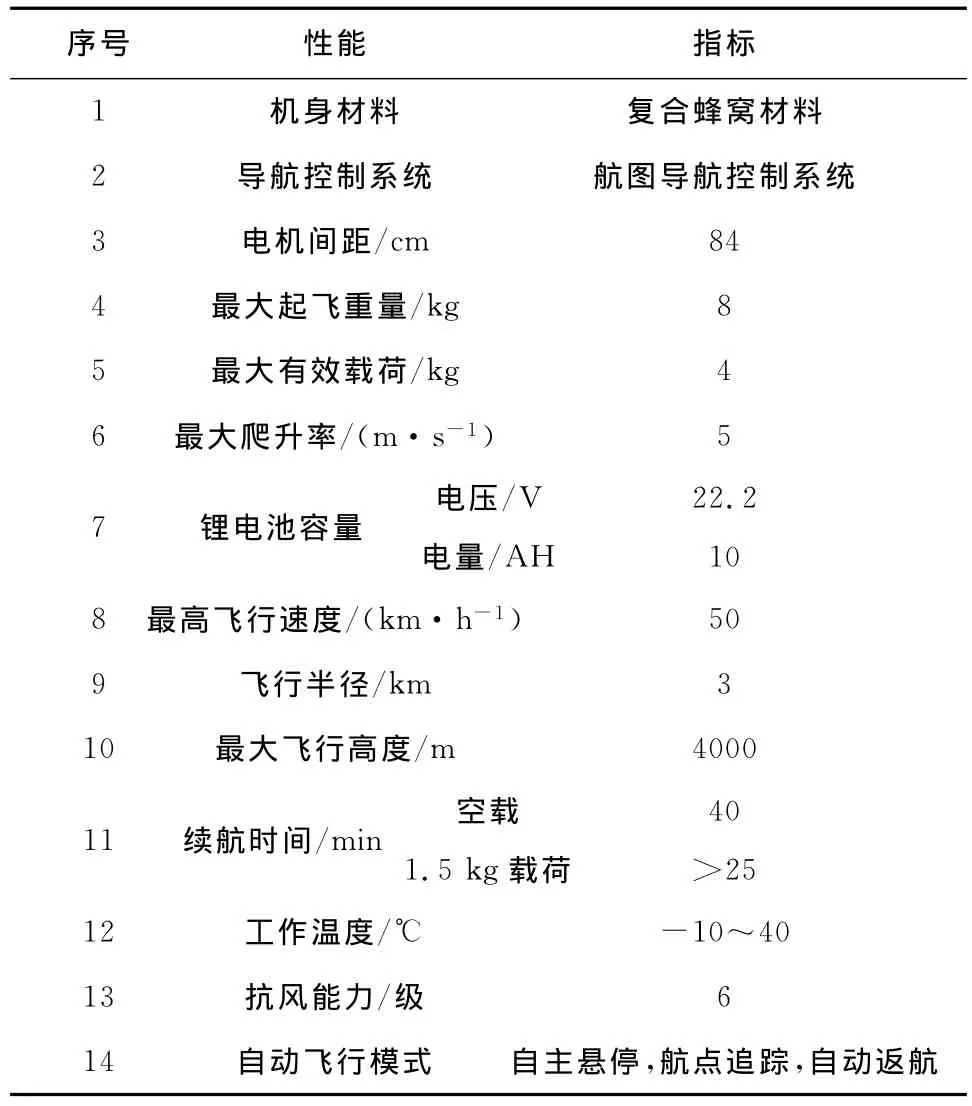
表1 XH-HE840型无人机性能指标
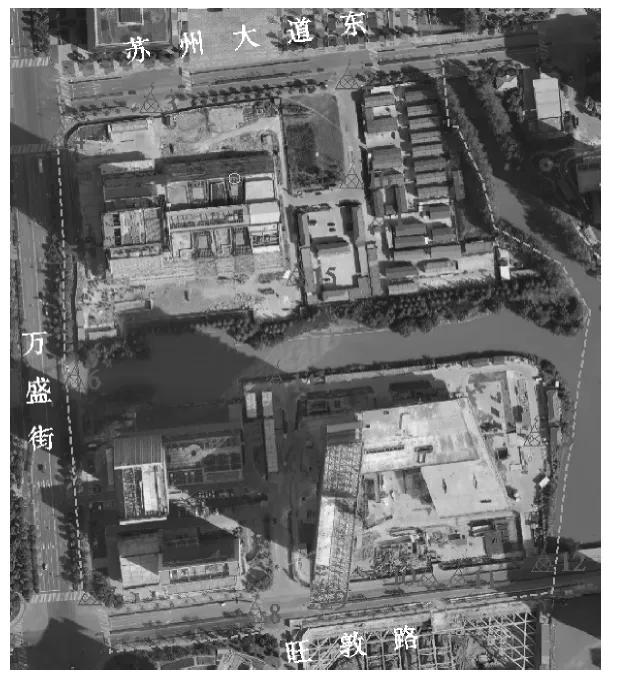
图2 像控点分布图

表2 参与平差像控点点位中误差 单位:m
平差后,用剩余的6个点进行检核,检核像控点点位中误差如表3所示。

表3 检核像控点点位中误差 单位:m
实验中对部分飞行区域用全站仪进行测量,圆柱体均采用归心测量,将两次测量数据选取部分特征点进行比较,结果如表4~表10、图3~图9所示。
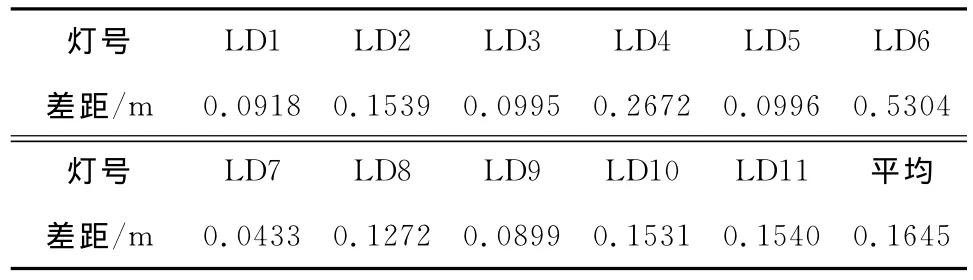
表4 归心改正后路灯的精度对比表
两次测量路灯差距的平均值为0.2222m,剔除最大差距0.5304m后,平均差距为0.1280m。

图3 路灯两次测量对比图

表5 归心改正后路牌及广告牌的精度对比表
两次测量路牌及广告牌差距的平均值为0.1433m。

图4 路牌及广告牌两次测量对比图

表6 大门门柱精度对比表
两次测量大门门柱四个角点最大差距的平均值为0.1522m。

图5 门柱两次测量对比图

表7 简易房屋房角点精度对比表
两次测量简易房屋房角点最大差距的平均值为0.1276m。

图6 房屋角点两次测量对比图

表8 围墙分段精度对比表
两次测量每段围墙最大差值平均值为0.1117m。

图7 围墙两次测量对比图
两次测量路边差距的平均值为0.2176m,剔除最大差距0.5079m后,平均差距为0.1450m。其中,由于花圃带对路边遮挡严重,相机无法拍摄至路边,测图误差较大,故不进行比较。

图8 路边两次测量对比图
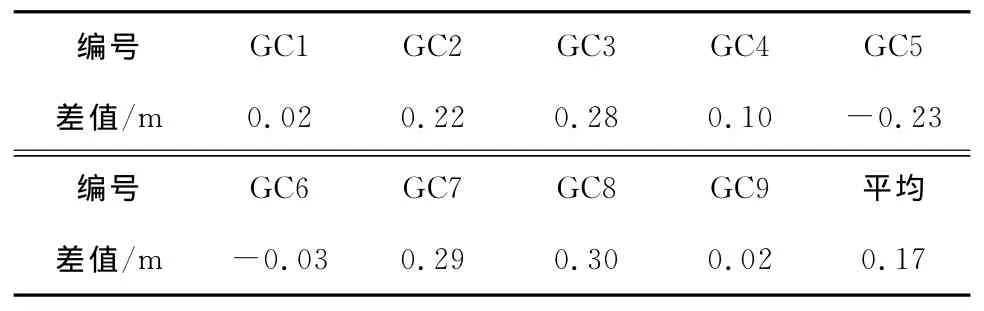
表10 高程精度对比表
两次测量相差4.0m之内的高程点差值的平均值为0.17m。
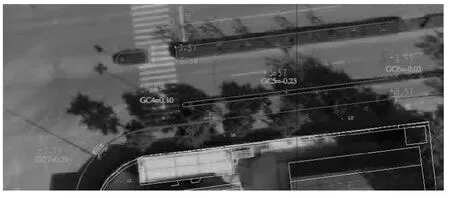
图9 高程点两次测量对比图
通过上述实验表明,无人机航测系统在没有植被、高大建筑物遮挡的情况下,对于影像可见区域的碎部点相对于全站仪的平面平均偏差基本可以达到15cm,高程点平均偏差可以达到17cm,基本可以满足1∶500地形图采集的要求。另外,相较于传统全站仪测量,其作业效率大大提高,从起飞到降落仅用了10min的作业时间,整个过程实现了全自主飞行,一键起降,飞行过程中飞机各项参数正常,飞行姿态稳定,且噪音较小。
4 结 论
(1)基于六旋翼无人机的城市测量信息获取系统是实时与快速监测城市变化的重要方法之一,随着相关技术的进一步成熟,其不仅可以承担城市1∶500、1∶1000、1∶2000等地形图的测量任务,在城市建筑、道路、桥梁、土方等竣工测量中同样具有更广阔的前景。
(2)六旋翼无人机融入多余度冗余理念,理论上,在两个电机损坏失去动力的情况下,只需从控制方面对飞行器的状态的进行调整,再对总拉力进行重新分配,即可保持自身姿态稳定。
(3)随着供电系统、飞控系统和云台增稳系统的进一步健全和完善,其在续航时间、抗干扰能力、飞行稳定性也将进一步提高,多任务跨区域连续飞行测量将成为现实。
(4)多传感器多维度数据融合技术进一步提高,无人机航测系统也必将迎来新的发展机遇。
[1]姬江涛,扈菲菲,贺智涛,等.四旋翼无人机在农田信息获取中的应用[J].农机化研究,2013,35(2):1-4.
[2]刘志军,吕 强,王东来.小型四旋翼直升机的建模与仿真控制[J].计算机仿真,2010,27(7):18-20.
[3]高 翔.六旋翼无人机的设计[D].哈尔滨:哈尔滨工业大学,2014.
[4]詹 镭,贺人庆,谢 阳,等.基于微型四旋翼无人机的智能导航系统[J].电子测量技术,2011,34(6):1-3,29.
[5]陈国栋,贾培发,刘 艳.微型飞行器的研究与发展[J].机器人技术与应用,2006,(2):34-44.
[6]岳基隆,张庆杰,朱华勇,等.微小型四旋翼无人机研究进展及关键技术浅析[J].电光与控制,2010,17(40):46-52.
[7]胡明朗,魏瑞轩,邹凌云.微型飞行器的仿生感知与控制[J].传感器与微系统,2007,26(5):8-11.
[8]郑伟光.四旋翼无人机飞行姿态控制系统研究[D].长春:长春理工大学,2010.
[9]周 权,黄向华,朱理化,等.四旋翼微型飞行平台姿态稳定控制试验研究[J].传感器与微系统,2009,28(5):72-74,79.
[10]彭贞慧.小型四旋翼无人直升机控制系统设计[D].南京:南京理工大学,2010.
