新一代天气雷达伺服系统电机测速机信号检测技术
2015-12-02张福贵杨苏勤
张福贵, 舒 毅, 张 双, 任 雍, 杨苏勤
(1.成都信息工程大学电子工程学院,四川成都610225;2.福建省泉州市气象局,福建泉州362000;3.福建省大气探测技术保障中心,福建福州350000)
新一代天气雷达(CINRAD/SA)是探测能力较好的一种灾害性天气探测和预警工具,现有CINRAD/SA雷达中天线/伺服系统使用的分类电机有直流电机和交流电机,直流电机包括进口和国产两种。国产伺服电机目前已经改进且在国内多个新一代天气雷达的伺服系统中投入使用,从使用情况来看,技术性能和可靠性均达到了预期的目标。后期生产的CINRAD/SA雷达对伺服系统进行了技术改进,采用了交流电机,提高了伺服系统运行的可靠性、可维护性,满足了天气雷达系统的高动态响应需求。何建新、潘新民、周红根、杨传凤等[1-5]对雷达天线/伺服系统原理和系统特殊故障处理进行了介绍和总结;蔡勤、舒毅、李明元、胡东明等[6-9]分别对雷达闪码、轴角箱、控制序列超时以及伺服系统方位典型故障进行了分析和处理。而本文运用实际的雷达/天线伺服系统的电机故障案例归纳总结了雷达天线/伺服电机测速机信号检测技术方法,此类方法可通过测量点和调整参数适用于目前中国布网的168部新一代天气雷达的天线/伺服系统的交/直流电机系统的信号检测和相关的故障排查,同类型相关天气雷达也可以参考本文的关键参数测量和调整方法,均可借鉴,可为新一代天气雷达伺服系统的交、直流电机测速机故障的现场维护、维修提供帮助和借鉴。
1 测速机信号的传输流程
1.1 直流伺服系统测速机
天线/伺服系统的直流电机测速机信号由电机自身的测速机生成,俯仰系统电机测速机信号通过滑环系统传输并与方位电机测速机信号一起通过轴角盒传输到天线座里面的上光端机设备中,在上光端机设备中俯仰电机和方位电机的测速机信号通过专用光纤系统的变换传输和重建传输至接收机系统的RDA机柜,然后通过DAU数据采集单元的转接进入DCU数据控制单元。在DCU数据控制单元内,信号反馈到天线/伺服系统的模拟板上进行天线位置的闭环控制,同时也被反馈到天线/伺服系统数字板上的A/D数据采样单元。如图1直流电机系统测速机信号传输流程。

图1 直流电机系统测速机信号传输流程
1.2 交流伺服系统测速机
交流系统电机也是自带测速机,俯仰和方位电机产生的测速机信号经由各自的电机信号线缆反馈至交流功放单元,然后经过天线/伺服交流系统功放单元的变换,信号进入DCU数据控制单元,在数据控制单元DCU内电机信号被反馈到天线/伺服控制系统的模拟板上进行位置闭环控制,同时也传输到天线/伺服系统数字板上A/D采样。图2为交流电机系统测速机信号传输流程。

图2 交流电机系统测速机信号传输流程
2 测速机信号的幅度比例
2.1 直流伺服系统
CINRAD/SA雷达天线最大转速为±36度/秒,直流电机测速机的对应输出为±39 V,深圳、宁波、连云港雷达站的实测结果与此吻合,根据所使用的进口直流电机手册,对应输出应为±36.1 V,武汉雷达站的实测结果与此手册吻合,而九江雷达站的实测结果与此相比则明显偏小,由于进口直流电机手册标明输出纹波可达10%,若以纹波为误差幅度,则九江雷达站实测结果仍在此误差范围内。该测速机信号在上光纤板经过A/D变换成为数字量,经过光纤传输,在下光纤板上通过D/A转换重建为模拟量,信号幅度与测速机的原输出信号相同。
2.2 交流伺服系统
CINRAD/SA雷达升级使用的交流电机测速机输出为三相交流信号,它通过电机反馈线缆进入交流功放单元后,被功放模块变为生成直流信号。测速机输出的交流信号的相位和幅度等信息,电机说明书中未见,但据交流功放模块资料,其所变生的速度信号输出范围是±10 V,据此推论,雷达天线最大转速为±36度/秒时,功放传输到DCU的电机速度信号为±10 V(实测稍有偏大)。
3 天线的方位和俯仰速度理论值
CINRAD/SA雷达天线运转时方位和俯仰的速度理论值,对于使用直流伺服系统和交流伺服系统的新一代天气雷达是相同的。
3.1 方位速度
雷达天线进行体扫时,在不同的仰角其方位的理论转速是不相同的,见表1雷达体扫在不同仰角的方位理论速度。
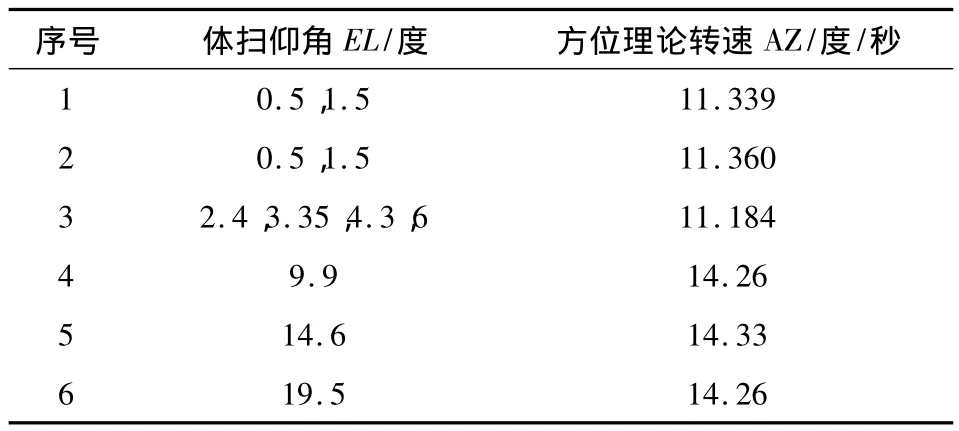
表1 雷达体扫在不同仰角的方位理论速度
据前文所述的电机测速机幅度比例和本节的天线理论转速,可以推算出天线体扫时,在各仰角的测速机信号的额定值,但实测与之有偏差。源于电机测速机输出的纹波较大,造成偏差。对于直流伺服系统而言,该偏差可能是由光纤系统对该信号进行转换与重建时造成。对于交流伺服系统而言,该误差则可能来源于功放模块对电机测速机传来的交流信号的变生过程。
3.2 俯仰速度
对CINRAD/SA天气雷达天线/伺服系统由于俯仰与方位控制策略不同,雷达天线的俯仰方向在变换角度控制时采用DOUBLET策略:第一阶段用最大控制速度从起始位置角度转向目标位置角度,第二阶段以反向最大速度控制实现天线的目标位置制动,第三阶段进行天线位置闭环控制,控制天线停留在目标位置角度。
前两个阶段各自维持的时间随着俯仰方向运动的角度距离变化,各自的维持时间也不同,值得注意的是,很多情况下第二阶段时间为0。俯仰方向测速信号的在仰角变化时的波形可参见后文。
4 测速机信号的检测点
CINRAD/SA雷达伺服系统中对于反馈回来的测速机的测速信号,最方便的测量点位于DCU的数字板上,为描述空间方向,测量时请面对DCU数字板的长边,并站在有电源接口的一侧。见表2测速信号检测点,以敏视达交流伺服DCU数字板实物为例,见图3交流伺服DCU数字板测速机信号检测点[10-11]。

表2 测速信号检测点

图3 交流伺服DCU数字板测速机信号检测点
5 电机测速机故障实例
5.1 直流伺服系统,方位电机测速机故障
根据技术资料,当方位电机运转速度达到10度/秒时,方位电机的测速机反馈信号值为:(39 V/36度/每秒)*10度/每秒=10.8 V,使用软件进行测试,深圳,宁波,连云港台站雷达实测结果与此相符,深圳雷达该信号波动幅度100 mV左右,宁波雷达波动可达300~400 mV,而连云港相比最佳,波动为60 mV左右。
由于进口直流电机手册换算有所不同,电机与天线之间有大约316∶1的减速比,则天线最大转速36度/秒对应电机转速1900转/分钟,而该手册标注,测速信号为19 V/每分钟1000转,则1900转/分钟;即天线36度/秒对应36.1 V。以此换算10度/秒对应10 V左右,天线进行体扫时在0.5度仰角转第一圈时方位速度为11.339度/秒,则对应方位测速信号应为11.35 V左右,武汉雷达的实测结果与此相符,使用软件测试,武汉雷达方位速度为10度/秒时,速度反馈信号为10.113~10.166 V,体扫0.5度第一圈时,方位速度反馈为11.484~11.532 V。而九江雷达则量值明显偏小,体扫0.5度第一圈时,方位速度反馈最小为9.9 V,如以测速机输出±10%的纹波为误差范围,则此值可视为处于允许误差的下界,以上都是正常运行的CINRAD/SA直流伺服系统雷达天线方位电机测速信号的情况。
连云港天气雷达在2010年2月发生天线/伺服系统故障报警导致雷达停机,用软件测试发现,当方位电机测速机的速度控制命令为10度/秒时,经检查方位测速机的测速信号幅度仅仅为4~6 V,幅度偏小,波形扰动大,即可定位为天线/伺服系统的方位电机故障,更换方位电机后雷达故障修复,故障报警消除,雷达正常运转。经仔细检查更换下来的故障方位电机后确认方位电机损坏原因是漏油渗入到电机里面,直接导致方位电机损坏。
5.2 直流伺服系统,俯仰电机测速机故障
2010年6月24日,南昌雷达站俯仰电机开始发生故障,其后故障频率迅速增加,到27日彻底损坏,经过检查损坏前后的俯仰电机测速机的信号波形输出明显异常。雷达天线/伺服系统电机测速机彻底损坏前其运行状态为:俯仰仰角从14.6°抬升到19.5°时,天线会过冲到30°,然后再冲回负仰角角度,这要操作5~6个来回才能将天线控制定位到目标位置19.5°,而其余大多数时候天线运行状态表现正常,其现象输出属于偶发故障,此时用示波器观察到的俯仰电机测速机的测速信号波形如图4俯仰电机测速机信号正常输出波形,测试方法为:使用雷达控制软件控制天线进行俯仰3度/秒的定速扫描,可发现雷达天线的俯仰运行现象是做往、复运动的正向加、减速运行以及反向加、减速运行过程。

图4 俯仰电机测速机信号正常输出波形
俯仰电机损坏后,测速机信号输出极小,导致速度环接近开环,前述的偶发故障现象成为必然现象。俯仰测速机损坏后的输出波形,如图5俯仰电机测速机信号输出异常波形,测试方法为:使用软件进行多次体扫或则多次泊位现象为:雷达天线在俯仰仰角30°和负角度之间来回往复运行,雷达天线失控,只能通过关闭伺服强电结束其运行。冲击运行时楼体震动感觉明显,雷达天线的俯仰运动控制速度至少在±15°/秒左右,但俯仰测速机的反馈信号幅值绝大多数时候只有±(1~2 V)左右,偶有±(3~5 V),幅值偏小。即可定位为俯仰测电机速机损坏,更换俯仰电机后雷达恢复正常,损坏的直接原因应是电机接近工作寿命且维护不佳。

图5 俯仰电机测速机信号输出异常波形
5.3 交流伺服系统,方位及俯仰电机测速机故障
自2010年4月开始,秦皇岛雷达天线仰角下降时,会偶发楼体明显震动。而后频率不断增加,7月4日中午,在每次仰角下降时,楼体都有明显震动,不久方位电机和俯仰电机彻底损坏。仰角不动仅方位转动时楼体也有明显震动,并且半分钟后,方位开始在约+/-100度之间来回摆动,而后体扫自动终止,雷达停机,以上现象都在方位测速机信号上有所对应,见图6天线仰角抬升时方位、俯仰测速机信号异常波形;其中黄色波形为方位测速机信号,蓝色波形为俯仰测速机信号。
在方位电机损坏前,雷达虽然能维持基本运转,但从测速机输出信号可见,方位测速机输出扰动过大,仰角从6度抬升到9.9度时,方位速度应从11.184度/秒增大到18.88度/秒,方位速度增大时,方位测速机输出扰动很大。

图6 天线仰角抬升时方位、俯仰测速机信号异常波形

图7 天线仰角下降时方位、俯仰测速机信号异常波形
天线仰角下降时方位、俯仰测速电机信号异常波形如图7所示,在方位电机彻底损坏之前,仰角从19.5度下降到0.5度时,方位速度从19.06度/秒减小到11.339度/秒。可见,方位速度减小时,方位测速机输出扰动更大,且超调明显,此时楼体震感明显,由于扰动过大的速度反馈信号作用于伺服控制系统,引起了方位速度调节的振颤,因谐振效应导致了楼体震动。
而后方位电机测速机彻底损坏,一开始表现为体扫仍在继续、方位仍在转动,但方位测速信号为0,此时虽然仰角不动,只有方位在转,但楼体同样明显震动,不久后,方位测速机信号间歇性出现,只在0值和±(6~10)V以上的大值之间交替闪现,图8(a)、(b)方位测速机输出间歇性异常信号表现出的就是这种情况,此时,方位在+/-100度之间来回摆动,不久体扫自动停止,雷达停机。

图8 方位测速机输出间歇性异常信号
在方位电机测速机彻底损坏后,用软件进入天线手动控制界面,在尚未发出任何命令时,方位自行转动,并且其测速反馈为0。判断为方位电机损坏后,更换方位电机,方位变速时方位测速信号的扰动消失,楼体震动再未发生。但仅更换方位电机时,使用软件测试,天线动作仍会出现偶尔不响应伺服系统的动态控制命令,或在不发命令时方位自行旋转且DCU内得到的方位测速信号为0的现象,这里判断故障为功放在带动已损坏的电机工作时被烧损,更换功放后问题彻底解决。
雷达修复后,仰角从6度抬升到9.9度时,方位速度从11.184度/秒增大到18.88度/秒,天线运行正常,此时方位和俯仰测速机正常信号的波形见图9天线仰角抬升时方位、俯仰测速机正常信号波形。

图9 天线仰角抬升时方位、俯仰测速机正常信号波形
图10天线仰角下降时方位、俯仰测速机正常信号波形。雷达故障修复,仰角从19.5度下降到0.5度时,方位速度从19.06度/秒减小到11.339度/秒。由图10可见,方位速度减小时,方位测速机输出平滑、无超调,天线运行平稳,楼体无感。

图10 天线仰角下降时方位、俯仰测速机正常信号波形
6 结束语
通过对新一代天气雷达(CINRAD/SA)交、直流伺服系统电机测速机信号的检测技术方法的总结,以及故障案例的归纳,有利于通过测量点和调整参数快速、高效的解决此类故障,从而为此型号相关雷达伺服系统的实时技术支持提供参考,从而大大提高对天气雷达的保障能力和设备可靠性[12-16]。
[1] 何建新.新一代天气雷达原理与系统[M].西安:电子科技大学出版社,2004.
[2] 潘新民,柴秀梅,崔炳俭,等.CINRAD/SB雷达伺服上电故障诊断分析[J].气象科技,2011,39(2):212-216.
[3] 潘新民,王全周.CINRAD/SA数字交流伺服系统调试和维修方法[J].气象科技,2013,41(5):825-831.
[4] 杨传凤,袁希强,景东侠,等.CINRAD/SA雷达天伺系统疑难故障原因剖析[J].气象科技,2009,37(4):439-443.
[5] 周红根,周向军,祁欣,等.CINRAD/SA天气雷达伺服系统特殊故障分析[J].气象,2007,33(2):98-101.
[6] 蔡勤,柴秀梅,周红根,等.CINRAD/SA雷达闪码故障的诊断分析[J].气象,2011,37(8):1045-1048.
[7] 胡东明,刘强,程元慧,等.CINRAD/SA天线伺服系统轴角箱多次故障的分析[J].气象,2007,33(10):114-117.
[8] 李明元,陈明林,左经纯,等.新一代多普勒天气雷达(CINRAD/CD)方位伺服系统典型故障分析及处理[J].气象,2012,38(1):123-128.
[9] 舒毅,杨苏勤,舒童,等.CINRAD/SA雷达控制序列超时故障分析[J].气象科技,2012,40(6):896-901.
[10] 舒毅.示波器在雷达维护维修中的几点应用[J].气象水文海洋仪器,2012,29(2).
[11] 中国新一代多普勒天气雷达 CINRAD/SA WSR-98D技术手册[M].北京:北京敏视达雷达有限公司,2000.
[12] 陈宝,高仲辉,郝立勇,等.机场多普勒天气雷达双机备份技术及可靠性分析[J].成都信息工程学院学报,2012,27(3):247-252.
[13] 甘兵,朱毅,王红艳,等.基于事件通知服务的雷达产品生成系统的数据分发改进[J].成都信息工程学院学报,2012,27(3):253-258.
[14] 卢会国,康立宁,李丹.基于关联规则的故障诊断方法研究[J].成都信息工程学院学报,2014,29(4):329-335.
[15] 陈松,佘勇,姚振东,等.永磁同步交流伺服系统在小型天气雷达中的应用[J].成都信息工程学院学报,2014,29(2):150-153.
[16] 刘娟,郑伟,谢键,等.CINRAD/SC天气雷达发射机故障综合分析与检修[J].成都信息工程学院学报,2011,26(1):86-90.
