大口径光学精密检测平台空间误差的计算方法
2015-12-01王詹帅张东旭
王詹帅,杨 炜,杨 平,张东旭
(厦门大学物理与机电工程学院,福建 厦门361005)
光学元件,尤其是大口径光学元件已经广泛应用于现代工业、农业、国防及科学文化事业中.随着科学技术的不断更新,对其面形精度和表面粗糙度等都提出了很高的要求[1].精密检测平台在大口径高光学元件检测领域发挥着主要作用[2],但其空间误差的准确获取一直是工程应用上的难题.
目前国内外主要利用量块、标准球等基准件以及激光干涉仪、球杆仪等检测设备对几何误差信息进行获取,郑大腾等[3]提出了一种采用大尺寸标准量块标定空间距离的标定方法;张虎等[4]提出了数控机床空间误差测量的激光干涉仪自动瞄准系统;吴雄彪等[5]提出了基于支持向量机的数控机床空间误差辨识与补偿[5];高贯斌等[6]提出了对坐标测量机的测量空间进行仿真分析得到空间误差;Wang等[7]提出了利用激光跟踪系统测量多轴数控机床的几何误差等.国外的研究者主要将激光跟踪系统应用到精密检测领域,开发出各具特色的检测方法.如Schwenke等[8]提出了利用激光干涉仪的映射对三坐标测量机进行标定等.
随着近年来精密检测平台测量技术的发展,以及各类高精密检测工具如激光干涉仪、球杆仪等的广泛使用,包括直线度误差、垂直度误差、定位误差、旋转误差等各项几何误差的测量已经能够较好地测量,本文所提出的空间误差计算方法利用多项几何误差,通过建立数学模型计算得检测平台的空间误差值,试验表明该方法能够有效辨识精密检测平台的空间误差,具有良好的实用性和应用前景.
1 空间误差计算方法建模
1.1 精密检测平台
大口径光学元件精密检测平台主要由检测系统、传动系统、工作台和控制系统等组成.传动系统由X、Y、Z三轴组成,由直线电机驱动,其中X、Y轴的最大行程400mm,Z轴的最大行程150mm,如图1所示.检测过程中,通过控制系统控制各轴联动以完成规划的检测轨迹,本文主要对三轴联动运行时空间定位精度进行研究.
1.2 空间误差计算方法建模
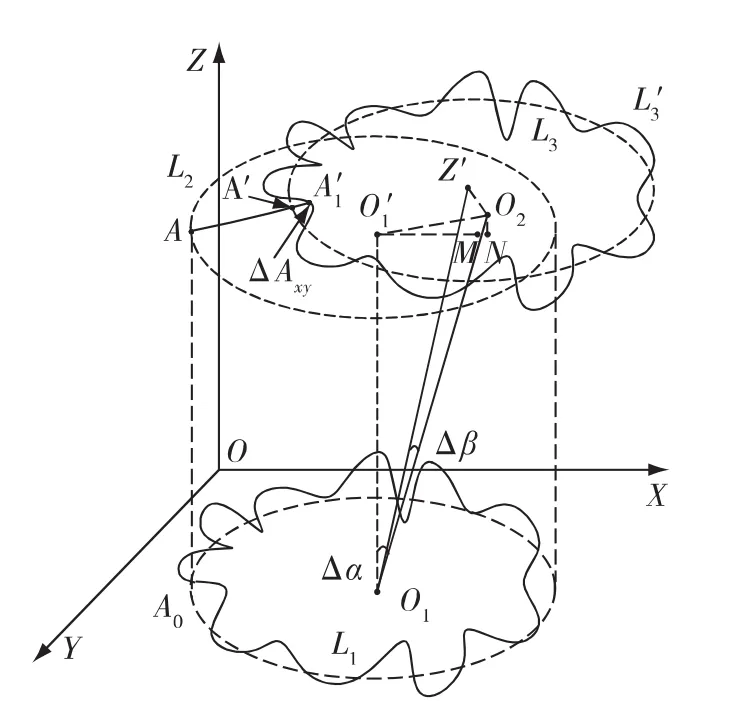
图2 空间误差计算示意图Fig.2 Calculation diagram of volumetric error
如图2所示,建立空间坐标系O-XYZ,将空间误差分解为XOY平面内联动误差和该平面沿Z轴运动后由Z轴误差所引起的误差,综合利用这两部分误差值,利用多项式拟合、平面几何相关理论计算出空间误差值,具体见图3所示.
具体来讲,首先测量得到XOY平面内X、Y两轴联动误差,并对其进行多项式拟合,可以得到该平面内任意一点A在该平面内的联动误差ΔAxy,误差范围为(emin,emax);其次,测量Z轴定位误差值进行多项式拟合,即可以得到Z轴满行程内的任一点定位误差值Δc;再次,测量出Z、X和Z、Y轴间垂直度误差值Δα和Δβ.当XOY平面在理想情况下,由L1平面位置沿Z轴上升O1O′1距离c至L2平面位置时,由于Z轴误差影响,其实际位置为L3平面,基于平面几何相关理论,计算得到A点在X、Y、Z方向的误差值;最后,利用上述测得的联动误差ΔAxy和A点在X、Y、Z3个方向的误差值,即可求出A点的空间误差值AA′1.
1.2.1 XOY平面内任一点定位误差的求解
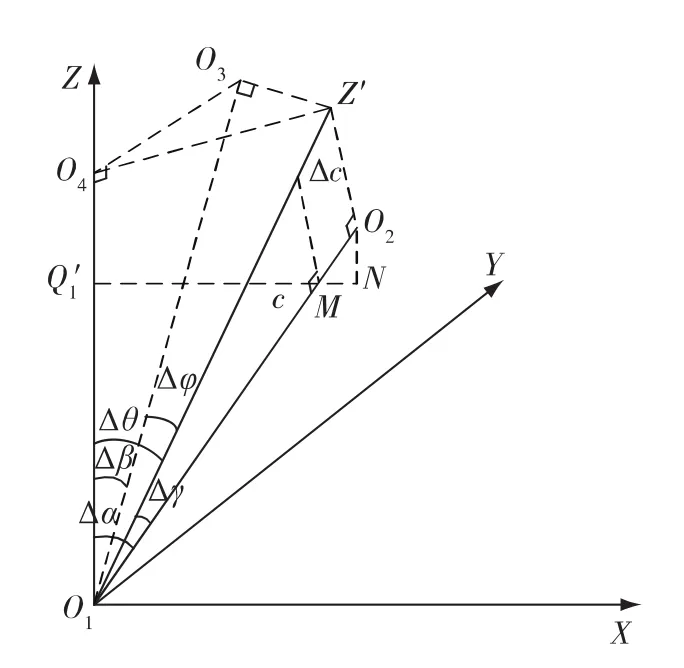
图3 精密检测平台XOY平面内任意一点沿Z轴方向运动示意图Fig.3 Diagram of solving Xand Zdirection error of arbitrary point Aon plane XOY
利用精密检测平台对XOY平面的联动误差进行测量,将得到的数据按圆方程最小二乘原理拟合,得到平面联动误差的拟合曲线方程.将拟合曲线与原数据理论进行对比,即可以得到该平面内任意一点A在该平面内的定位误差值,取XOY平面内的误差最大值为emax,误差最小值为emin,定义ΔAxy表示XOY 平面联动误差,ΔAxy为(emin,emax).
1.2.2 Z轴定位误差的拟合求解
XOY平面沿Z轴运动时,由于Z轴运动中存在定位误差,影响精密检测平台的空间误差.对Z轴满行程内的定位误差进行测量,将测得的Z轴定位误差值进行多项式拟合,得到误差方程,即可以求出Z轴满行程内任意点的定位误差.取Z轴定位误差最大值的Z轴位置为精密检测平台空间误差最大值参考位置.
1.2.3 轴间垂直度误差求解
XOY平面沿Z轴运动时,由于存在Z、X轴间垂直度误差,它会影响精密检测平台的空间误差.随着Z轴行程的变化,在Z轴行程达到最小值或最大值时,轴间垂直度误差对空间误差的影响最大.取Z轴行程最大值和最大值的位置为精密检测平台空间误差最大值参考位置.
1.2.4 XOY平面沿Z轴移动后A点在X、Y、Z方向误差求解
Z轴运动不影响X,Y两轴联动的误差,但是会引起XOY平面整体偏移和旋转,进而影响该平面内任一点A的空间运动误差.为了计算空间误差最大值,取Z轴定位误差最大时的位置和其行程在最大值和最小值时的emax和emin的空间误差值.取数值最大时的误差为XOY平面沿Z轴运动所引起的最大误差.几何关系如图2,3所示.
将Z轴的实际运动轨迹O1Z′向ZO1Y面做投影,得到其轨迹投影O1O3,过O3做O1Z垂线交点为O4,通过解直角三角形O1O3O4和O1O4Z′,计算出Z轴实际运动轨迹与ZO1X面的夹角Δγ;计算过程中需考虑Z、X轴间垂直度误差Δα,Z,Y轴间垂直度误差Δβ,

其中Δθ是实际运动轨迹与Z轴之间的夹角.继而,将Z轴的实际运动轨迹O1Z′向ZO1X面做投影,得到其轨迹投影O1O2,其中O1Z′=c+Δc,通过解空间直角三角形O1O2Z′、O1O1′M 和MNO2,可计算A 点在X方向的误差值O′1N,

A点在Z方向的误差值NO2,

用相同方法在ZOY面作投影,将Z轴的实际运动轨迹O1Z′向ZO1Y 面做投影,得到其轨迹投影O1O3,其中O1Z′=c+Δc,通过解空间直角三角形O1O3Z′、O1O3O4、O1O4Z′,得出Z 轴实际运动轨迹与ZO1Y面的夹角Δφ,及A点在Y方向的误差值Δyz.
1.2.5 A点的空间误差计算
综合利用上述检测方法测得的XOY平面内的联动误差ΔAxy和A点在X、Y、Z3个方向的误差值,代入公式,即可求出A点的空间误差值AA1′.
2 试 验
2.1 各自由度误差的测量
准确测量上述空间误差模型中的各项几何误差是应用该模型进行检测平台空间误差计算的前提与基础[9].本文综合应用雷尼绍 XC-80激光干涉仪、球杆仪和基恩士激光位移传感器等仪器设备对涉及到的各项几何误差进行了有效测量.
2.1.1 Z轴定位误差的测量
采用雷尼绍XC-80激光干涉仪及其光学组件,对Z轴定位误差进行3次测量,取平均值为最终误差值,本文主要测量Z轴定位误差.测量结果如表1所示,Z轴在满行程内定位误差为-1.6~1.5μm.
2.1.2 XOY平面联动误差的测量
采用雷尼绍QC10球杆仪对半径为150mm的圆周误差测量,测得精密检测平台在XOY平面的联动误差ΔAxy,球杆仪逆时针旋转2周,然后顺时针转2圈,完成球杆仪测量.同时,采用自主开发的精密检测平台软件实时读出X、Y、Z三轴光栅尺反馈的坐标位置,方便与球杆仪测得的圆周误差测量结果进行对比,可获取XOY平面内联动误差最大值emax和误差最小值emin,即可求出联动误差ΔAxy为(emin,emax).
2.1.3 轴间垂直度误差的测量
采用雷尼绍QC10球杆仪,在直径300mm内测得两轴间的垂直度误差,同理以X,Y轴间测量为例.由测量结果,采用下述方法剥离系统误差:以球杆仪测量所得垂直度误差为基准,以圆方程拟合各点,用原始数据减去对应的圆各点所得差值作为垂直度的随机误差.测量及辨识结果为:X、Y轴的垂直度误差为0.22μm/mm;Z、X 轴 的 垂 直 度 误 差 为 0.18 μm/mm.
2.1.4 空间误差的计算
利用本文所提空间误差计算方法对各自由度误差进行计算,可求得精密检测平台的空间误差.其中,X、Y 轴联动误差测量结果为-3.9~5.6μm,Z轴运动误差结果为-1.6~-1.5μm.由此得到空间误差值为-5.22~5.80μm.
2.2 验证试验
2.2.1 试验条件
为了验证本文提出的空间误差计算方法正确性,以泰勒霍普森的Form Talysurf PGI 1240轮廓仪的校准半球为基准,标准球半径为79.525 7mm.使用海德汉公司的CT6001接触式测量系统,配合ND 281B型数字显示仪进行测量,测量方式如图4所示.
2.2.2 试验方案
如图5所示,首先,利用海德汉公司的CT6001接触式检测系统对校准半球进行顶点的查找;其次,测量Z=5mm时,测量顶点左右各55mm的点,每点之间间隔1mm,保持Y轴不动测量XOZ平面上的母线Mx1,保持X轴不动测量YOZ平面上过原点的母线My1;再次,将校准半球升高140mm,在升高过程中配合雷尼绍XC-80激光干涉仪监测,保证标准球的高度准确升高140mm;最后,测量Z=145mm时,测量顶点左右各55mm的点,点之间间隔1mm,保持Y轴不动测量XOZ平面上过原点的母线Mx2,保持X轴不动测量YOZ平面上过原点的母线My2.

表1 Z轴定位误差测量结果Tab.1 Measurement result of positioning error
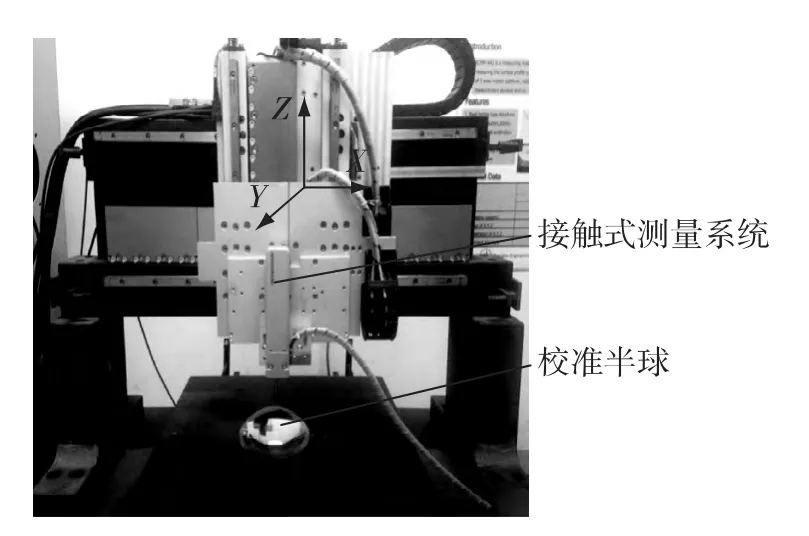
图4 接触式检测系统测量校准半球Fig.4 Measurement of calibration hemisphere based on contacting detection system
雷尼绍XC-80激光干涉仪测量定位精度,精确到0.1μm;QC10球杆仪测量其精度,精确到0.1μm;海德汉接触式检测系统测量矢高量程为0~60mm,精确到0.01μm,在安装海德汉CT6001接触式检测系统及标准半球过程中,不可避免地会引入安装误差,但是安装误差,如倾斜度等,属于系统误差,在本文获得误差结果的数据处理过程中将其消除.具体测量方案如图5所示.
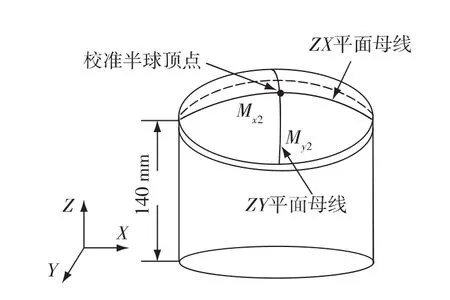
图5 验证试验示意图Fig.5 Schematic diagram of calibration hemisphere validation test
2.2.3 试验数据分析
在得到母线的原始数据后,对其进行数据处理.剔除4组数据中的粗大误差点,在4组数据中插入随机值;由于精密检测平台工作台存在倾斜,需对数据进行去倾斜;将测量所得的4组数据进行圆方程的拟合,并与标准半球方程计算出的理论值进行对比,得出校准半球半径的误差值.

图6 校准半球测量的数据处理结果Fig.6 The processing result of calibration hemisphere measurement
数据处理结果如图6所示,图6(a)、(b)为Z=5 mm处XOZ、YOZ平面方向母线的测量结果,误差最大值为5.37μm,最小值为-4.99μm;图6(c)、(d)为Z=145mm处XOZ、YOZ平面方向母线的测量结果,误差最大值为5.18μm,最小值为-5.02μm.可见正向最大值是图6(a)中的5.37μm,负向最大值是图6(d)中的-5.02μm.测量结果显示,校准半球半径的误差值为-5.02~5.37μm.
3 结 论
本文将空间误差分解为平面内两轴联动误差和该平面沿第三轴运动所引起的误差,提出一种新的空间误差计算方法.该空间误差计算方法将雷尼绍激光干涉仪、球杆仪等仪器测得的数据根据空间误差模型拟合、推导,计算得到精密检测平台的空间误差为-5.22~5.80μm.为验证空间误差计算方法所得出的空间误差,利用海德汉公司的CT6001接触式测量系统测量泰勒霍普森的Form Talysurf PGI 1240轮廓仪的校准半球,以校准半球为基准,得出检测平台的空间误差值为-5.02~5.37μm,与计算得到的空间误差值-5.22~5.80μm基本一致.表明本文提出的空间误差的正确性和有效性.
[1]Chen M J,Li D,Dong S.Research on a large depth-to-di-ameter ratio ultra-precision aspheric grinding system [J].Journal of Materials Processing Technology,2002,129(3):91-95.
[2]Brinksmeier E,Mutlugunes Y,Kloche F,et al.Ultra-precision grinding[J].CIRP-Annals-Manufacturing-Technology,2010,59(2):652-671.
[3]郑大腾.柔性坐标测量机空间误差模型及最佳测量区研究[D].合肥:合肥工业大学,2010:28-35.
[4]张虎,周云飞,唐小琦,等.数控机床空间误差球杆仪识别与补偿[J].机械工程学报,2002,38(10):108-113.
[5]吴雄彪,姚鑫骅,何振亚,等.基于支持向量机的数控机床空间误差辨识与补偿[J].中国机械工程,2010,12(1):1397-1400.
[6]高贯斌.关节臂式坐标测量机自标定方法与误差补偿研究[D].杭州:浙江大学,2011:18-25.
[7]Wang J D,Guo J J,Zhang G X,et al.The technical method of geometric error measurement for multi-axis MC machine tool by laser tracker[J].Measurement Scinece and Technology,2012,23(4):045003.
[8]Schwenke H,Franke M,Hannaford J,et al.Rror mapping of CMMs and machine tools by a single tracking interferometer[J].CIRP Annals Manufacturing Technology,2005,54(1):475-478.
[9]张东旭,杨平,杨峰,等.基于多体系统理论的精密检测平台空间误差建模与补偿[J].兵工学报,2014,35(4):501-508.