步进电机计算动词PID控制系统的设计
2015-12-01郑雪钦
郑雪钦
(厦门理工学院电气工程与自动化学院,福建 厦门361024)
在高性能的步进电机控制系统中,要求其驱动控制系统具有更好的控制性能和更高的精度,这对步进电机驱动控制系统提出高精度的控制策略要求.步进电机驱动控制过程要求具备精确的系统参数,便于对控制规律进行整定,但是在实际运行过程中,系统参数是变化的,要得到优良的系统性能,需要对驱动控制器进行相应的调整[1].目前用于实现高精度步进电机控制的方法通常是采用适用于线性控制系统[2]的传统 PID控制方法[3],且实现简单、性能稳定,但对于环境多变、非线性动态系统,却难以实现对步进电机的在线实时高精度控制[4].为了实现对步进电机的在线实时自适应控制,在传统PID控制方法的基础上,人们引入了一些智能算法,如:神经网络[5-6]、模糊控制[1]、遗传算法[7]等来改变 PID控制参数,以提高步进电机控制的鲁棒性,但这些智能控制算法较复杂,存在动态响应时间较长,影响系统的响应速度的问题.为了提高步进电机的定位精度、响应速度和抗负载干扰能力,本文在分析计算动词PID控制的基础上,设计和构建了步进电机定位控制系统,通过系统仿真和实验验证,实现了系统的高精度定位和快速响应.
1 计算动词PID控制器[8]
计算动词理论由旅美学者杨涛教授提出,是运用进化函数对人类思维动态建模,将人类专家用动词描述或执行的动态知识经验嵌入到机器智能中,是人工智能发展的一个新的系统框架.计算动词PID控制器结构如图1所示,结构类似于模糊PID控制器的结构.虽然这两种控制器结构很类似,但两者的设计方法大大不同,计算动词PID控制器中的解动词化模块的输出是动词“observe”的结果[9].

式中:u(t)为控制器的输出;e(t)为控制器的输入,它是期望值和被控对象输出值的差;Kp为控制器的比例系数;Ti是控制器的积分时间常数;Td是控制器的微分时间常数;r(t)是系统期望值.
2 步进电机计算动词PID控制器的系统设计
2.1 步进电机的数学模型
步进电机电压方程、转矩方程和运动方程如下[10]:
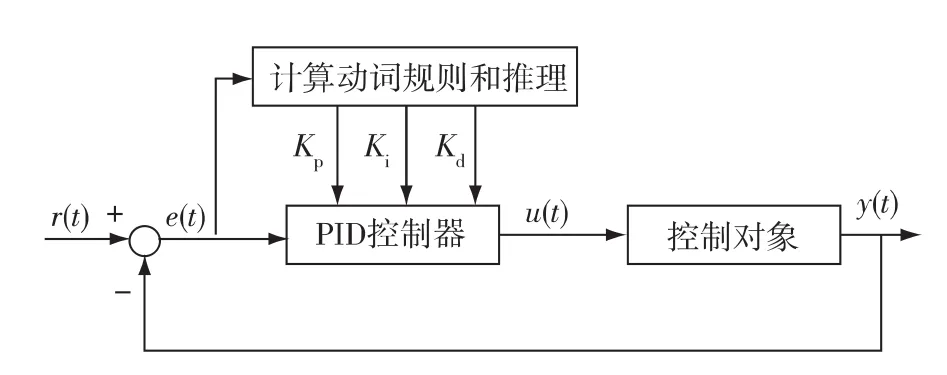
图1 计算动词PID控制器结构图Fig.1 Block diagram of a computational verb PID controller
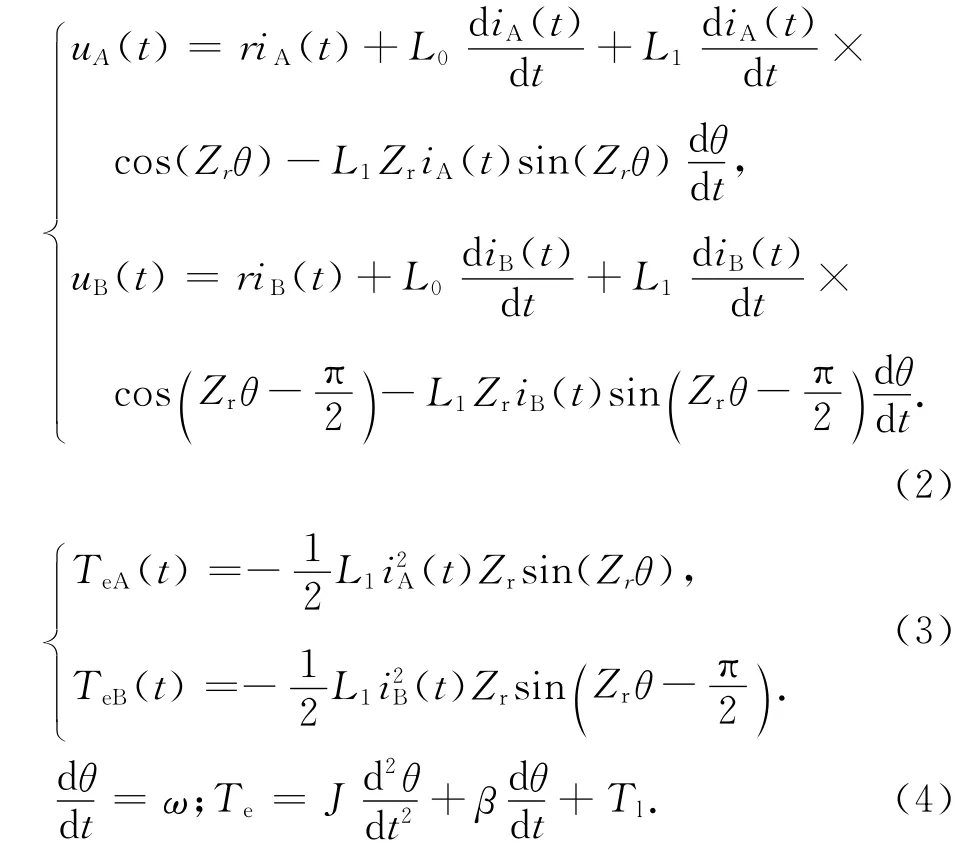
式中,uA(t)、uB(t)为定子两相电压;iA(t)、iB(t)为定子两相绕组电流;r为A相电阻;Zr为转子齿数;Te为电磁转矩,是两个单相绕组产生的电磁转矩TeA(t)、TeB(t)之和;β为粘滞系数;J为转动惯量;θ为转子位置角;L0为自感的恒定分量;L1为自感的基波分量;ω为转子角速度;Tl为负载转矩.
2.2 定义误差绝对值|e|的模糊集
根据误差变化曲线在不同时间段上所对应曲线的相似性,以及模糊集区间的对称性,对误差e(t)的模糊集定义可转化为对误差绝对值|e|的模糊集定义,定义为{ZO,PS,PM,PB}.当e(t)成指数稳定地接近0时,由于轨迹在这些区域的时间更长,所以必须更关注接近0的区域.同时把误差变化规范在[-1,1]内,动词规则的隶属度函数和模糊规则的隶属度函数有所不同,其数学表达式为[9];

2.3 建立动词控制规则
根据步进电机定位控制过程、误差变化情况、PID参数整定规则,计算动词规则对模糊控制规则进行提取和浓缩,把相同的变化趋势合并,减少规则数目,用7条计算动词规则涵盖了49条模糊控制规则,并应用于控制系统的各个阶段.建立如下7条动词控制规则:

2.4 动词相似度
在控制过程中,e(t)的变化大部分时间并不是完全等同于控制规则中的前件条件;但反过来说,任一时刻,肯定能在控制规则的前件条件中,找到一个和e的变化趋势最相似的become.用“动词相似度”来恒量各个动词之间的关系,是一个数值,取值范围[0,1],相似度越接近1,表示这两个动词相似的程度越大;相似度越接近0,则表示越不相像.在动词控制规则里,可以把前件条件里的7个动词定义为7个标准动词,控制过程中观察到的动词都和这些标准动词做比较.所有动词都可以用become来进行规范化,become的进化函数可表示为

become(state 1,state 2)的时间跨度取Tw,x(t)是观察到的波形,一个被观察的动词的进化函数为
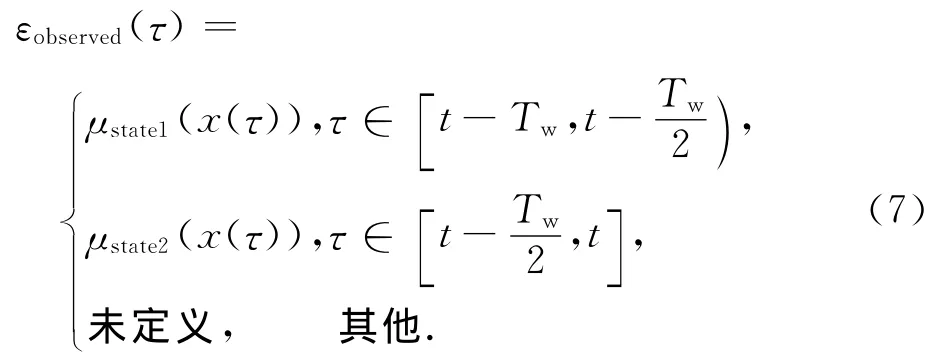
求 “observed”这 个 动 词 和 become(state 1,state 2)的相似度过程中,首先将Tw分成state 1和state 2两个区间:
1)在前半个区间求出a1和b1
2)在后半个区间求出a2和b2

4)在整个Tw范围内求相似度

2.5 动词控制规则的实现
计算动词规则的推理建立在动词相似度的基础上,在控制过程中,观察控制误差e的变化趋势,求出e和标准动词的相似度.控制器的输入和输出都是动词形式.输出的动词Vy是标准输出动词以相似度为权的加权平均量.
若x(t)becomexi,则y(t)becomeyi,i=1,…,n,
3 仿真分析
在MATLAB中分别建立传统PID控制器、模糊PID控制器、计算动词PID控制器步进电机定位控制系统(图2),由式(1)~(3)建立图2中“步进电机”模型,3种控制方法结果比较如表1所示.本文所采用步进电机的参数分别为:定子电阻R=35Ω,定子电感L=35mH,转子齿数Zr=80,转动惯量J=0.025kg·m2,阻尼系数Bm=0.002 5,负载mr=0~2.5N·m,步进电机功率为0~1W.计算动词参数:Kp=0.005,Ki=0.78,Kd=0.45;Kp取 值 范 围:0.004 98~0.005,Ki取值范围:0.78~0.80,Kd取值范围:0.45~0.47,仿真结果如图3所示.
由仿真结果可知,在步进电机定位控制中,采用新型的计算动词PID控制器,响应曲线优于传统PID控制器和模糊PID控制器,而且运算速度与传统PID控制器相当,体现了很好的控制性能.

表1 3种PID控制方法比较Tab.1 Comparison of performance time of the three PID
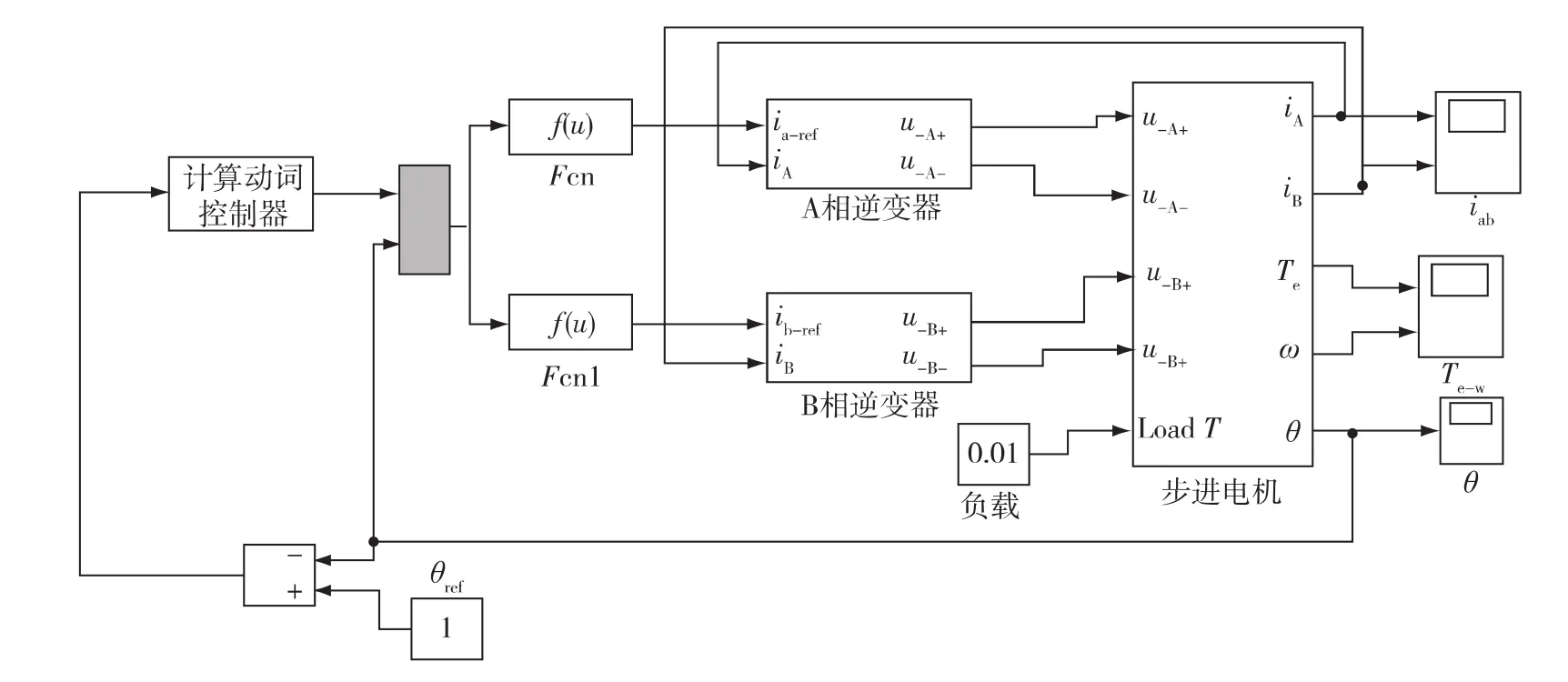
图2 基于计算动词PID步进电机定位控制系统仿真模型Fig.2 Simulation model of CVC stepping motor position control system

图3 控制位置响应曲线Fig.3 Rotor position curve
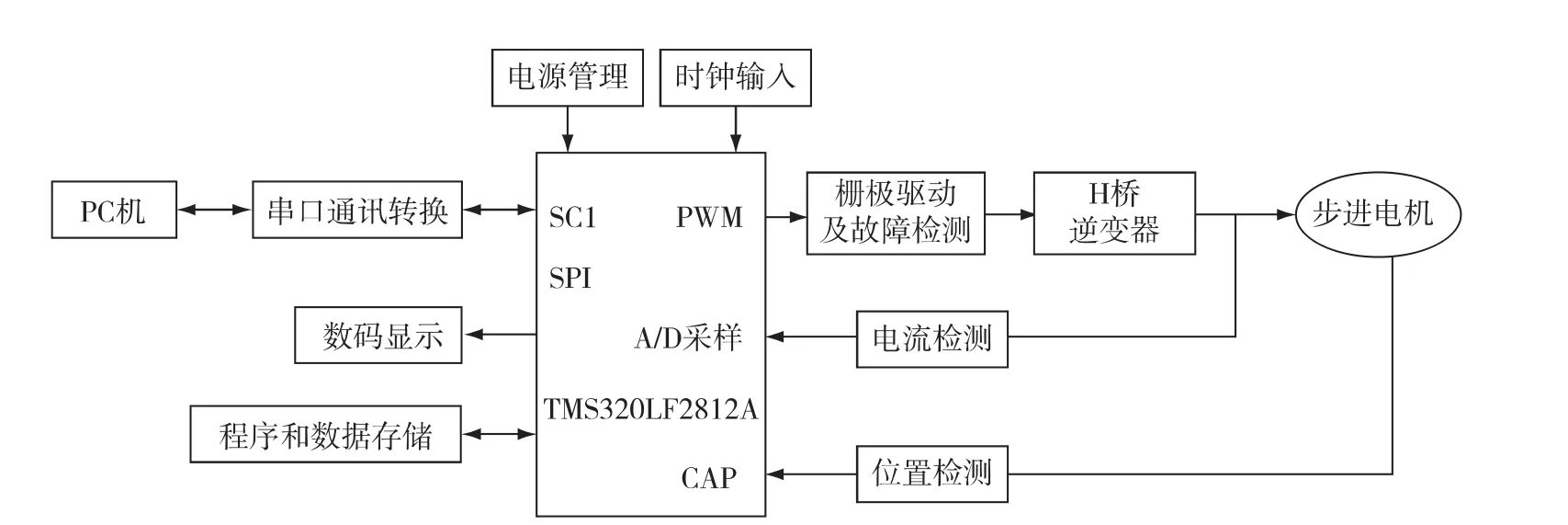
图4 步进电机定位驱动控制系统Fig.4 Position drive system of stepping motor
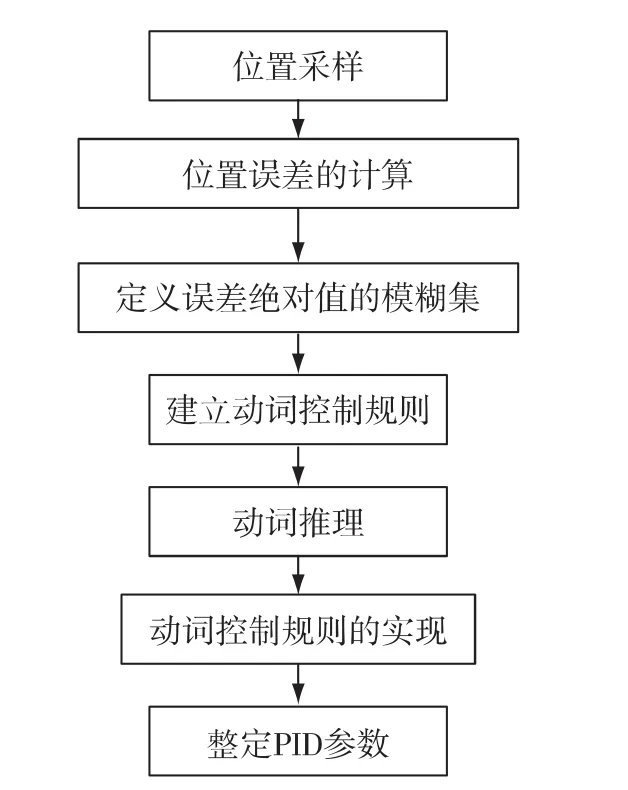
图5 计算动词PID控制位置响应曲线Fig.5 Rotor position of computational verb PID
4 实验验证
为研究混合步进电机高精度定位系统,测试实际装置具体性能,验证本文控制算法实现的可能性,本文完成了基于TMS320LF2812A步进电机定位驱动控制系统的设计,如图4所示.计算动词PID控制步进电机位置信号(流程图如图5),分别给二相电机绕组通入相应的脉冲宽度调制(PWM)控制信号,实现步进电机的高精度定位控制.步进电机位置响应结果如图6所示,可以看出实验结果与仿真结果相一致.
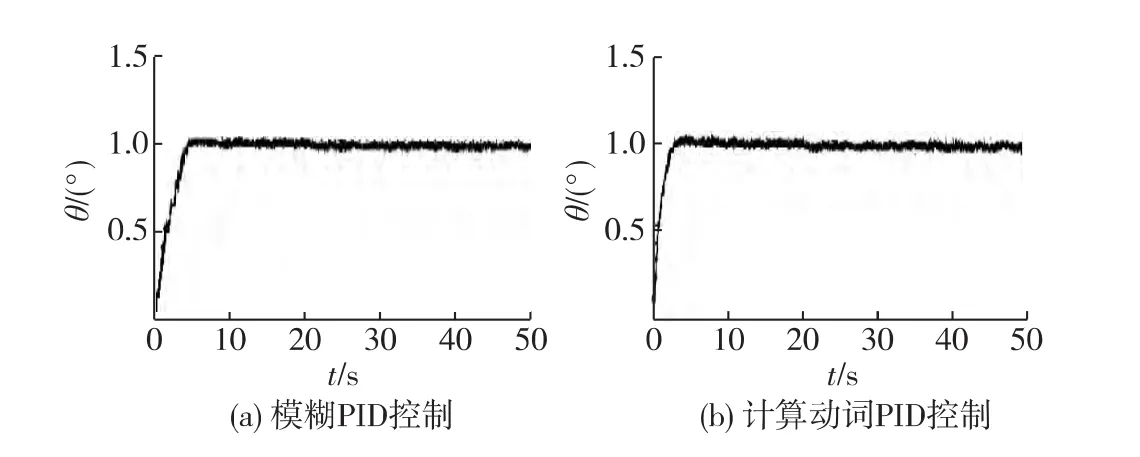
图6 步进电机定位驱动控制系统Fig.6 Position drive system of stepping motor
5 结 论
本文研究基于计算动词PID控制器的步进电机智能驱动控制系统,分析了计算动词PID控制算法的实现,建立了系统的仿真模型和基于TMS320LF2812A步进电机驱动控制系统,仿真和实验结果表明,在步进电机定位控制系统中,采用计算动词PID控制,运算时间短、动态响应快、定位精度高,可以保证系统运行的实时性和稳定性.
[1]Betin F,Pinchon D,Capolino G A.Fuzzy logic applied to speed control of a stepping motor drive[J].IEEE Transactions on Industrial Electronics,2000,47(3):610-622.
[2]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002:11-15.
[3]史敬灼.步进电机伺服控制技术[M].北京:科学出版社,2006:24-31.
[4]Wale J,Pollock D.Hybrid stepping motors and drives[J].Power Engineering Journal,2001,15(1):5-12.
[5]Shi J Z,Xu D G,Wang Z P.A Novel hybrid stepping motor-neural position servo system[C]∥Industrial Electronics Society.Denver,USA:IEEE,2001:948-952.
[6]王泮海,徐殿国,史敬灼.基于模糊神经网络控制的混合式步进电机伺服系统研究[J].高技术通讯,2004,10(5):60-63.
[7]Miura T,Taniguchi T.Open-loop control of a stepping motor using oscillation-suppressive exciting sequence tuned by genetic algorithm[J].IEEE Trans Industry E-lectron,1999,46(6):1192-1198.
[8]Yang T.Architectures of computational verb controllers:towards a new paradigm of intelligent control[J].International Journal of Computational Cognition,2005,3(2):74-101.
[9]Yang T.Simple computational verb PID controllers[J].International Journal of Computational Cognition,2009,7(1):61-73.
[10]Zheng X Q,Guo D H.Study on driving control of twophase stepping motor based on mixing mode PWM[J].Journal of System Simulation,2012,24(2):456-461.