水下光学图像的典型劣化分析与仿真模拟
2015-12-01李维香
李维香,袁 飞,程 恩
(厦门大学信息科学与技术学院,厦门大学水声通信与海洋信息技术教育部重点实验室,福建 厦门360005)
水下成像成为海洋开发和利用领域中极有价值的方式之一.水下成像过程中,水体的结构对光的传播有很大的影响.水介质的密度远大于空气密度,相对于空气中所拍摄的普通图像来说水下成像所遇到的问题更为复杂和困难.典型的水下图像由于存在照明条件不良及水体对光的吸收效应、散射效应和卷积效应等,使得水下图像大多存在以下问题[1-2]:有限的可视距离、低对比度、非均匀照明、模糊、光斑、色彩降维以及各种复杂因素的噪声.因而,对水下图像进行有效的改善必须建立在对水下成像系统的机制和特性进行全面的研究之上.此外,对水下图像劣化模型的研究也是从根本上解决水下图像降质问题的必要手段.
近年来,已有不少文献对图像劣化模型进行了相关研究,文献[3-4]针对水下图像对比度下降、模糊和复杂噪声问题,基于湍流模型利用维纳滤波器进行图像复原算法的研究,但是并未考虑照明系统对成像的影响.文献[5]提出了一种非均匀照明系统,非均匀光照的功率分布与水下光衰减的传播相反,该论文用Monte Carlo方法模拟水下光照的功率分布,结果显示该系统有效减少了后向散射噪声,提高了作用距离.文献[6]提出了一种基于海雪现象模型的图像仿真方法,研究了降低海雪微扰影响的彩色图像复原技术.文献[7]针对频谱离散对于水下彩色图像的影响,基于Jaffe-McGlamery水下图像形成模型的基础上对水下彩色图像进行色彩恢复.虽然国内外相关研究取得一定成果,但仍缺乏完备的水下图像劣化模型和仿真系统用于研究或预测图像处理等技术的性能.本文综合上述问题,考虑了水下散射、水下光源距离及摄像机与成像距离的影响,同时也考虑到色彩降维和图像模糊的作用,基于Jaffe-McGlamery模型,对水下彩色图像进行劣化仿真,目的是为了得到一组接近水下图像的素材,为后续的研究提供帮助,如图像复原、去噪.
本文首先分析了水下光学图像劣化成因,然后在分析水下图像劣化特点的基础上,对水下图像劣化仿真.具体做法是以Jaffe-McGlamery模型为基础,将彩色图像分为RGB 3个向量,分别用不同衰减系数作Jaffe劣化后再合并,接着再进行离焦模糊和运动模糊劣化,使其更加接近真实水下图像劣化效果.由于劣化是对图像的一个质量的退化过程,不同水下环境影响下,图像的劣化严重性不一样,因此我们不是为了选取质量较好的图像,所以不能用一般的质量评价方法去评价图像的质量,这里我们主要用主观评价劣化效果的好坏.
1 水下光学图像劣化分析
水下光学图像在获取过程中会出现图像的劣化,主要表现为两个方面:一是水下环境的影响,二是成像设备自身对成像的影响.成像设备自身问题包括成像系统的散焦,成像器材的固有缺陷,以及设备与成像目标的相对移动.
1.1 水下环境的影响
成像在水下环境和空气中有很大区别,这是因为水介质对光波具有吸收和散射的作用.
水对光的吸收具有明显的选择性.由于海水的不均匀性,衰减系数随传输路径和水温的变化而变化,也随着光波波长的变化而变化.水能够强烈吸收紫外和红外部分,在可见光谱区域,吸收最大的是黄色、红色和淡绿色光谱.由于蓝色的波长最短,使得蓝色光在水中能够传播最远的距离.纯净水和清洁海洋水在光谱蓝绿区域透射率最大,但即使是这个蓝绿窗口,水的吸收也使光的强度每米衰减4%,而其他颜色的光在几米外就几乎消失了[8],易导致图像色彩降维,呈现蓝色或绿色调为主,如图1(a).因此,水对光的选择性吸收作用不仅造成光能量衰减,同时使得水下摄像物体的颜色失真.
水下散射对成像影响也非常大.散射又分为前向散射和后向散射.传输距离越远,前向散射影响越大,它会使扫描分辨率和目标背景对比度下降.后向散射随着入射光功率的增大而变严重.散射光对图像衬度有非常严重的影响,它造成图像的对比度下降,随着距离增大,画面反差降低,图像细节模糊[9],如图1(b)、(c).另外,在深海中有一种特殊的视觉现象叫作海洋雪,如图1(d),在深海拍摄的图片会带有随机分布的白色亮点,仿佛翩翩飞舞的雪花,严重影响图像质量[6].
1.2 成像设备自身问题的影响
水下摄像机是一个水密壳窗,该水密壳窗将目标与成像平面分别位于空气和水两种介质中,因此考虑到两者的折射率的不同,当光线从水介质经过平面玻璃射向空气时就会产生折射时,相机的聚焦和视角会产生误差,焦距增大;由于平面壳窗的限制会造成视场变小;水中的平面壳窗还会使透镜的放大率不均匀,造成枕形失真;同一透镜对不同色光焦距各异,这使成像时不同光谱段的焦点不重合,造成色散,引致图像色差和锐度降低.

图1 水下图像Fig.1 Underwater image
在浅海中或白天环境下,水下图像可以在自然光照下获得.但在深海或者夜晚的环境下,即使是最清的水也看不到光.在比较浅的水中,有时照明亮度不够,就需要增加辅助照明来提高成像质量.由于在水中波长长的光衰减大,因此选择波长短的光源辅助照明.但对浑浊的水质,悬浮粒子较多的情况,短波长的光,散射也较为严重.由于照明光是会聚光的,成像光线强弱分布差异较大,以亮度最强点为中心径向逐渐减弱,即光照不均匀问题,反映在图像上为背景灰度分布不均、轮廓灰度过度平滑的特点,如图2.

图2 典型海底非均匀光照Fig.2 Atypical non-uniform illumination seabed image
此外,当景物与摄像系统发生相对运动,会使成像效果恶化,造成运动模糊.由于海水的流动和水下环境的不确定性,运动模糊在水声图像中相当常见.该问题的产生是由于相向运动造成在探测器平面上一帧时间内对同一景物获得连续不同的放大率,从而导致空变的径向辐射状模糊.
综上,水下光学图像的劣化大致有以下几类:水体波动导致图像产生自阴影、假纹理、假轮廓等假细节;水体及悬浮物对光的吸收、散射导致图像亮度非均匀细节模糊和色彩降维;非均匀照明光、有限可视距离导致成像灰度不均和边缘平滑.这些现象都给后续目标辨识和图像处理造成了困难.
2 水下光学图像劣化模拟
就劣化模拟方法而言,有两个入手点:一是正向劣化,针对水下图像的获取特点,特征化通信系统参量,模拟出特定通信环境下的水下图像劣化效果;二是反向劣化,从水下图像的劣化特点入手,利用图像的计算机储存特点,对图像进行时域、空域或频域的数学建模,然后直接劣化计算,模拟出特定的水下图像劣化效果.
Jaffe-McGlamery水下成像模型是个包含照明、物体反射属性、介质以及传感器特性的模型,但是它不包括水下成像设备对成像的影响,本文在Jaffe-Mc-Glamery模型的基础上进行改进,将彩色图像分为RGB 3个向量,分别用不同衰减系数作Jaffe劣化后合并,然后再进行离焦模糊和运动模糊劣化,使最后仿真结果更加接近真实水下图像效果.
2.1 简化Jaffe-McGlamery水下成像模型
模型的建立基于两个客观事实:1)成像具有线性叠加特性,即接收到光辐照量包含3个成分:直接反射成分Ed、前向散射成分Ef、后向散射成分Eb.故光入射成像平面上的总光辐照ET表示为:

2)介质与光波的相互作用.设介质是各向同性、均匀的,光在水介质中会衰减和散射,在水下环境中,偏向可能是由于尺寸与光波波长相当的悬浮粒子的衍射,或散射指数不同与介质的微小物体造成的.研究表明可以将两种现象合一表示为:

其中E(p2)是点p2上的入射辐照度,E(p1)是点p1上的入射辐照度,r是间隔距离,c是总衰减系数,表示每单位距离的光强衰减量,由大气透射表测得.典型深海水、沿海岸海水和海湾水的衰减系数分别为0.05,0.2和0.33m-1.
假设一个无限薄的波束(没有光散射),建模时将衰减和散射分开看作与吸收作用和散射现象的因素:c=a+b,则式(2)改写为:

再假设水下照明是一个点光源,由波束模式来表征,定义为函数b(θs,φs).该函数表示光源单位距离的半球面上单位面积接受的辐射量,单位 W/m2.角度θs、φs定义了光线从光源到场景平面(scene surface)上点p′的方向,如图3.该点由三维坐标系定义,p′=(x′,y′,0).

图3 基本水下成像模型Fig.3 The basic model of underwater imaging
到达场景之前,波束呈球状传播,在水中衰减.场景上点p′的入射辐射量可以写作:

其中γ是光源入射光线与场景平面p点法线的夹角,Rs是光源和p之间的距离.
一些到达平面的小角度光辐射是来源于前向散射,加入前向散射成分,可以把式(3)~(4)改进为:

其中*表示卷积计算,g为点散射函数(PSF),定义

其中,G是经验常数,且|G|<|c|,B 是经验衰减函数,F-1表示傅里叶反变换,f表示径向频率.
为了计算物体反射幅度强度,要将入射辐射模型乘以反射图的反射率值.在水下摄像机光实验系统中,物体用一个平面反射图M(x′,y′)表示,典型海洋中的目标物体的取值范围在[0.02,0.1].
另外,有3种衰减使成像平面上的光辐射弱于进入摄像机(CCD)的辐射.第1种是球面衰减,来自镜片特性(基本上是由于有限孔径),由(cos4θ)/F 表示,θ是摄像机的入射光线和光学坐标的夹角,F是透镜的焦距比数(焦距比数=焦距/镜头直径).第2种衰减是透镜透射率,表征为Tl.第3种衰减屈居于焦距的相对值和相隔距离Rc,如图3.进入摄像机、到达成像平面之前的的光强总衰减,可以表征为一个乘性参数:

简化Jaffe-McGlamery模型考虑浅海阳光充足、光照均匀的情景特点,后向散射影响忽略不计,因此不考虑Eb成分,则ET=Ed+Ef.其中Ed可以写作场景平面点p′上的辐射量EI的函数.因此,必须考虑该平面上的反射,介质衰减,以及摄像机的影响:

其中Rc是摄像机到点p′的间隔距离.前向散射成分写作:

其中,g(x,y,RcG,c,B)的傅里叶变换为:

其中,设权重系数K=e-GRc-e-cRc,B≈c.
模型典型系数K取值范围0.2~0.9,总衰减系数c:海滩为0.323;海岸为0.252;深海0.049,Rc在1~20m,焦距0.035m.CCD参数按典型水下相机属性,透射系数取1,焦距比数取2.8.CCD与光源距离,CCD、光源与成像平面(xy平面)的距离设为m的数量级.由于光源分布和水下散射严重,相对于成像平面尺寸而言,距离需要足够远;其次,成像平面的离散抽样单位距离要合理.
将图像分为RGB 3个向量,分别用不同衰减系数作Jaffe劣化后再合并.其中,R为红色光,波长λ=650nm;G为绿色光,波长λ=560nm;B为蓝色光,波长λ=450nm;总衰减系数与水质和光波波长有关,光波的吸收系数、散射系数和总衰减系数参见图4.因为水下光学吸收特性,实际会产生蓝色和绿色2种色调的图像,这和前面提到的色彩降维吻合.
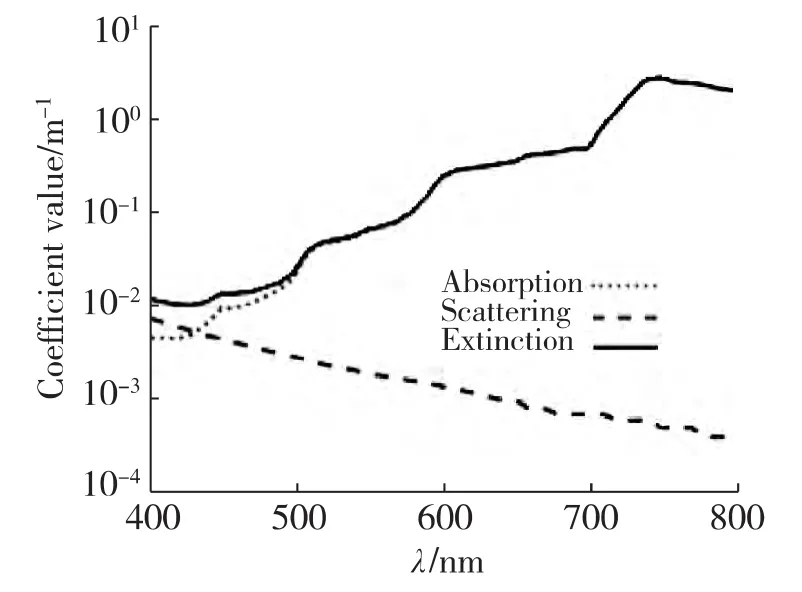
图4 纯水的光学参数(吸收,散射和总衰减系数)Fig.4 Optical parameters of cleaning water
通过大量的实验结果表明,对应于不同的d值,Z0=6总是能取得最优或者是次优的显示结果,由于篇幅的原因,这里给出部分实验结果进行分析.如图5,CCD和光源之间的距离d设为3m,两者到成像平面的距离设为相等Z0=Zs,改变Z0大小观察劣化效果.从图像效果可见,该模型能够反应水对光的吸收作用和海洋前向散射效应,能够模拟海水中特有的图像色彩降维.随着照明源离成像距离Z0的逐渐增加,最开始出现图像曝光、亮度不均现象,然后到6m后达到较好的均匀亮度的成像,此后距离越大,成像越灰暗,直到最后无法成像.

图5 Jaffe劣化(红蓝光吸收):小丑鱼Fig.5 Jaffe deterioration
如图6,设定Z0=6m,改变CCD和光源之间的距离d,可见两者距离越远,成像亮度渐暗,d=3时效果较好.所以设定Z0=6m,改变CCD和光源之间距离d=3m时,再进行离焦和运动模糊劣化.
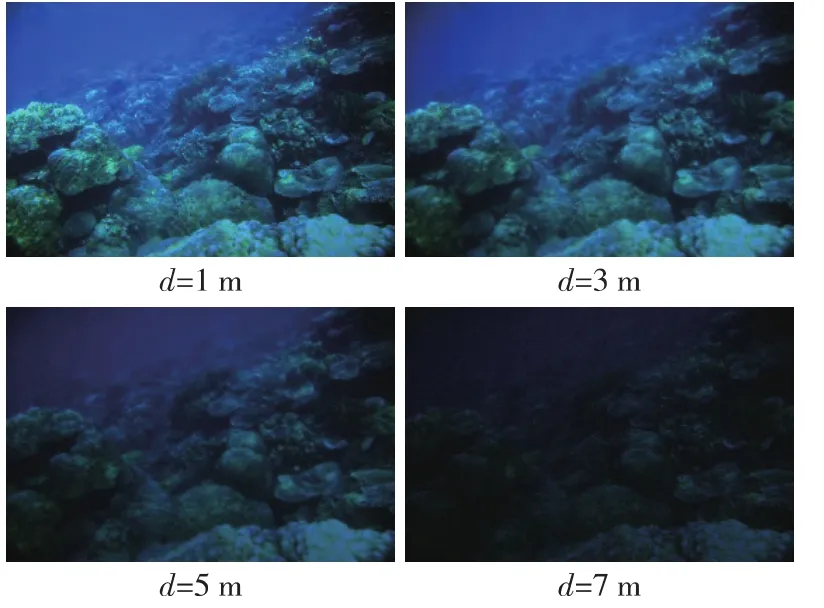
图6 绿色降维:珊瑚礁(Z0=6)Fig.6 Green degradation:reefs(Z0=6)
2.2 离焦模糊劣化
离焦模糊图像是指在拍摄时景物与相机的相对运动引起的离焦,或是成像区域内不同深度的对象所引起不同程度的离焦,还有由于在成像区域中存在不同深度的对象会使自动调焦系统引起混淆而导致拍摄的相片离焦等.
离焦模糊的劣化可以写作一个圆盘函数,圆盘半径是需要确定的劣化参数,又叫模糊半径,决定了离焦模糊的程度.圆盘函数写作

对式(11)进行离散傅里叶变换后得到

其中J1表示一阶第一类贝塞尔函数,如式(13)所示;M×N是离散傅里叶变换的尺寸.

H(u,v)第一过零点轨迹为圆形,即频谱的第一个暗环,其半径r就是模糊半径.由第一类贝塞尔函数的性质可知r表示为式(14)所示:

实验发现:模糊半径r<1时,图像基本无离焦模糊效果;当r>1,r值越大,离焦模糊越严重.而图像对比度失真则会呈周期性变化,r=0.9时,图像对比度完全颠倒,此后每隔0.7个单位的模糊半径,对比度颠倒的现象会再次出现.我们把这个称作离焦模糊劣化的对比度失真周期,出现对比度失真时对应的模糊半径称作对比度失真半径.显然,周期=0.7,0.9,1.6,2.3,…都是对比度失真半径,在其附近的劣化图像也有轻微的对比度失真现象.所以在仿真逼近水下模糊图像时,应该避开这样的对比度失真半径.选择合适的模糊半径r可以得到水声模糊效果图像,而从劣化的水下图像求取r值有助于图像复原算法的研究.
2.3 运动模糊劣化
运动模糊包含多种具体的模糊,如一般的线性模糊、旋转模糊等.如果在时间T内,相机相对于场景以固定的速度v及角度φ进行平移.如果L=vT是曝光时间内场景与相机的相对运动长度,那么成像系统的点扩展函数为[10]:

图7 离焦模糊的劣化图及对应H函数的频谱Fig.7 Deterioration image of defocus blur and the corresponding Hspectrum function
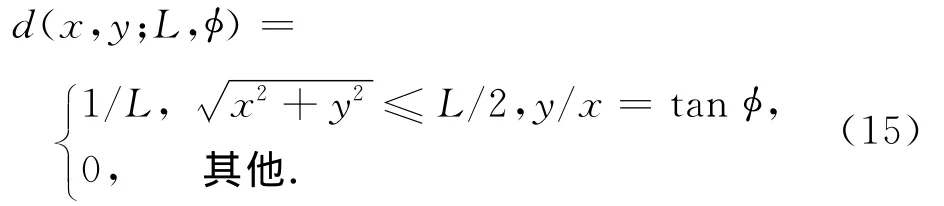
若场景中的所有物体均以相同的速度移动,那么点扩展函数d(x,y;L,φ)是空间不变的.但是如果场景中的某个物体的运动速度独立于所处的场景,那么可以认为点扩展函数是空域变换的.
仿真实现时,在设定tanφ=y/x的前提下计算出L的值.拍摄时运动模糊的程度和方向与相对运动的角度相关.如水下相机的轻微抖动,图像只会稍微模糊,而相机拍摄瞬间的大幅度晃动则会使运动模糊的线性重影更长.如图8所示,模板劣化模拟运动模糊,模板尺寸影响点扩散函数(PSF)模糊特性在图像的扩散,决定运动模糊度程度,模板越大运动模糊越严重.
对r=2离焦模糊劣化后的图像进一步劣化,得到最终的反映水下劣化特性的图像,如图9.
3 结 论
本文总结归纳了水下图像在获取过程中的劣化类型和原因,重点分析了海水吸收、衰减、散射和硬件对水下光学成像的影响和相应劣化特点,给出了水下图像劣化典型图例.水下成像利用了Jaffe-Mc-Glamery原理,成功仿真了浅海干净水质下,光学摄像机水下拍摄成像,体现了摄像机、光源与成像平面的位置特点、海水前向散射以及光谱选择性吸收和衰减.然后再对图像进行离焦模糊和运动模糊劣化仿真,体现了光学设备对成像的离焦和运动造成的影响.

图8 运动模糊劣化仿真Fig.8 The motion blur deterioration simulation

图9 最终的劣化图像Fig.9 The final deterioration image
[1]张辉.水的光学特性对水下光学成像质量影响的分析[J].电子测试,2013,20:261-262.
[2]陈从平,邹雷,王健.基于清晰度评价的水下退化图像盲复原[J].三峡大学学报:自然科学版,2012,34(4):86-88.
[3]杨淼,魏志强.基于湍流退化模型的自适应水下图像复原及其评价[J].海洋技术,2012,4:8.
[4]王马华,赵正敏,王士湖,等.基于改进湍流模型和偏振成像技术的水下退化图像复原方法[J].农业工程学报,2013,29(sup.):203-209.
[5]Wang Z,Zheng B,Zheng H.Numerical simulation of underwater inhomogeneous illumination[C]//OCEANSBergen,2013MTS/IEEE.[S.l]:IEEE,2013:1-4.
[6]Boffety M,Galland F.Phenomenological marine snow model for optical underwater image simulation:applications to color restoration[C]∥OCEANS,2012-Yeosu.[S.l]:IEEE,2012:1-6.
[7]Boffety M,Galland F,Allais A G.Color image simulation for underwater optics[J].Applied Optics,2012,51(23):5633-5642.
[8]张赫,徐玉如,万磊,等.水下退化图像处理方法[J].天津大学学报:自然科学版,2010,43(9):827-833.
[9]王玲玲.基于双目立体视觉的水下三维重建[D].杭州:浙江大学,2011.
[10]袁万立.模糊图像复原及评价方法的研究[D].无锡:江南大学,2012.