基于多元Taylor法的并联机器人运动学研究*
2015-11-03张少芳徐晓昭
张少芳,徐晓昭
(石家庄邮电职业技术学院计算机系,石家庄050021)
基于多元Taylor法的并联机器人运动学研究*
张少芳,徐晓昭
(石家庄邮电职业技术学院计算机系,石家庄050021)
机器人技术发展到现在,虽然已经得到了突飞猛进的进步,但是对于并联机器人运动学正解的封闭解问题依然是机器人技术的瓶颈,在实际应用中采用广义几何法和方程组的数值解法等,不过首先推导过程非常的复杂,且在求解的过程中还存在解不唯一等问题。因此,为了避免上述问题,文中根据多元函数的Taylor公式推导出了一种基于三元非线性方程组牛顿迭代法的并联机器人运动学正解算法,同时,基于其数学原理,也可以得到并联机器人的反解。Taylor法以其自身的优势,巧妙地解决繁琐的并联机器人运动学正解多解取舍问题,直接获得了工作空间内满足运动连续性的合理解,该算法的迭代次数少,收敛速度快,是一种非常有潜力的方法。
非线性方程;牛顿迭代;Taylor公式;并联机器人;多元函数
0 引言
并联机器人有结构简单、造价低、承载能力强、精度高和易于控制等特点,是国内外高新技术研究的热点。正是由于并联机构独特的优越性,其被广泛的应用于数控机床、医疗机器人以及微电子制造中的精密定位装置等领域[1]。但并联机器人的研究与发展存在不可逾越的三大瓶颈问题,即正向运动学求解、工作空间求解、奇异性分析[2]。
近年来,并联机器人运动学得到国内外学者的广泛研究。Stefan Ulbrich等提出了一种离线训练法,该方法是用高斯混合模型使精确度大幅提高[3];Honghai Liu等研究了一种模糊定性(FQ)方法对机器人运动学进行了研究,最后在MATLAB上证明了其正确性[4];Ying Hu等提出了一种六自由度MPR的3PPUU MPR模型,精确的控制了机器人的位姿[5];M.E.Daachi等提出了基于傅里叶级数的C5并联机器人逆动力学模型,通过神经网络很好的控制了机器人的姿态[6]。Lu Ren等开发了一种自适应控制方法,有效的控制了同步误差[7]。但是,一般形式的并联机构的运动学解析正解问题依然没有一个令人满意的解决方案,因此本文对并联机器人研究的一大瓶颈问题——正向运动学求解进行了深入研究。

图1 并联机器人
图1为本文所研究的Delta并联机器人机构,其运动学求解也面临着上述问题。但是由于Delta机构是一类特殊的并联机构,其简单的机构本质决定了它能得到显式的解析正解。本文提出了一种基于三元非线性方程组牛顿迭代法,同时将该方法应用到并联机器人运动学的正解计算问题,使得方程组得到最优唯一解。三元非线性方程组的原理是基于三元函数的Taylor公式建立的,利用多元函数的Taylor公式可以推导出三元非线性方程组的牛顿迭代法。其推导过程简单、直观 ,并能直接给出解析解实时控制时满足运动连续条件的封闭解。
1 基本定理
三元函数的Taylor公式:
如果函数X=G(x,y,z)在某一点(x0,y0,z0)的某个邻域内连续且具有直到(n+1)阶的导数,(x0+ h,y0+w,z0+k)为此邻域内任一点,则有
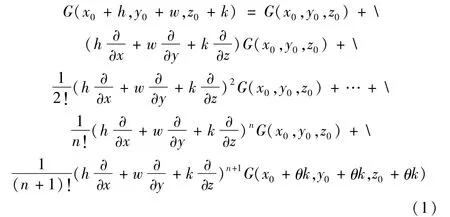
其中(0<θ<1),式(1)即为三元函数的Taylor公式。
2 三元非线性牛顿迭代法
2.1 三元非线性方程牛顿迭代格式的确立
设X=G(x,y,z)在点(px,py,pz)的某一邻域连续且有至少二阶的连续偏导数,(px+m,py+n,pz+k)为此邻域内任一点,则有
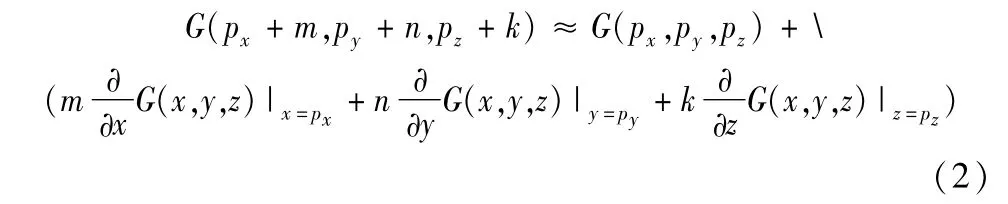
其中m=x-px,n=y-py,k=z-pz
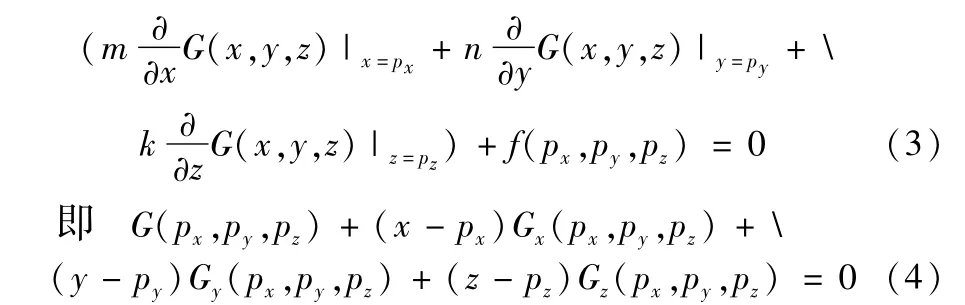
于是方程G(x,y,z)=0可近似的表示为
同理设Y=M(x,y,z)在点(px,py,pz)的某一邻域内连续且有连续偏导数,(px+m,py+n,pz+k)为此邻域内任一点,则同样有:
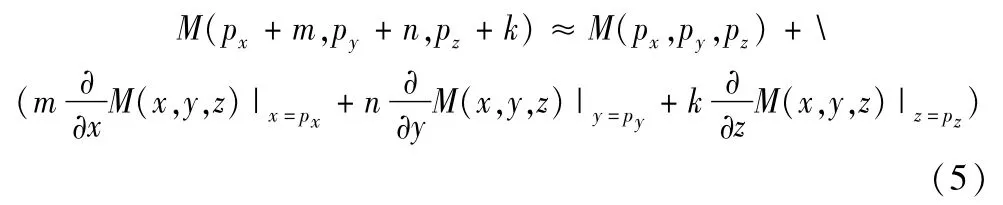
其中m=x-px,n=y-py,k=z-pz;于是方程M(x,y,z)=0可近似表示为:


同理设Z=K(x,y,z)在点(px,py,pz)的某一邻域内连续且有连续偏导数,(px+m,py+n,pz+k)为此邻域内任一点,则同样有

其中m=x-px,n=y-py,k=z-pz;于是方程M(x,y,z)=0可近似表示为:

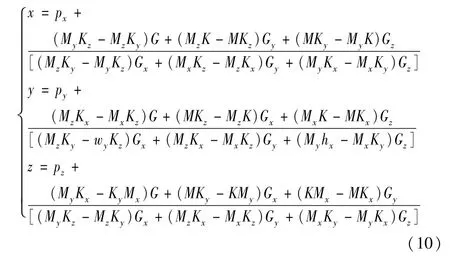
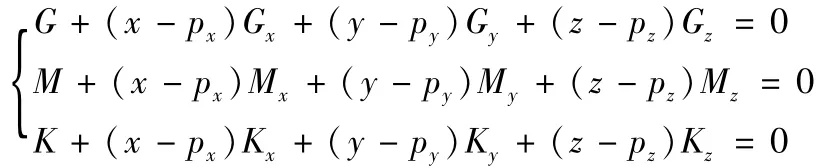
根据上述的结论联立方程(7)、(9)、(11),得到三元非线性方程组,简写为:

求解上述方程组得:
本文设计的三元非线性方程组牛顿法迭代流程如下。
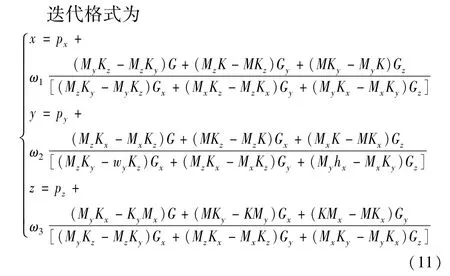
2.2 求解流程
(1)求G(x,y,z)=0的解。迭代流程为
①初始ω1=ω2=ω3=1,迭代一次之后得到G(px,py,pz)。若则(px,py,pz)即为最优解,若不是,转入②;
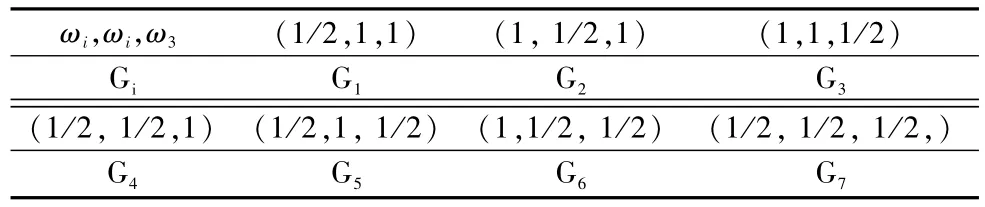
表1 迭代参数ωi与函数值Gi的关系
(2)求M(x,y,z)=0的解,迭代流程为
初始点为G(x,y,z)=0的解(pxk,pyk,pzk),ω1,ω2,ω3取ω1,ω2,ω3经过一次迭代得到M(pxk+1,pyk+1, pzk+1),若 满 足且,(σ1、σ2为允许误差),则点(pxk+1,pyk+1,pzk+1)为G(x,y,z)=0且M(x,y,z)=0的解,若不满足,则判断是否成立,若成立,按照式(14)继续迭代,若不成立,按照表2变换ω1,ω2,ω3可以得到7个候选迭代点。
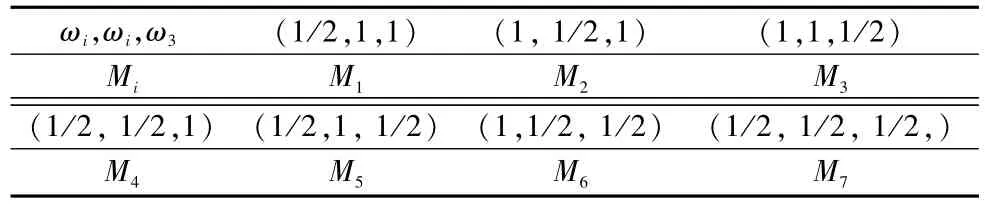
表2 迭代参数ωi与函数值Mi的关系
在迭代过程中,若迭代点 (pxn,pyn,pzn)满足迭代终止,迭代点 (pxn,pyn, pzn)即为G(x,y,z)=0且M(x,y,z)=0的解,记此时的ω1,ω2,ω3为ω1j,ω2j,ω3j。
(3)求K(x,y,z)=0的解,迭代流程为
初始点为G(x,y,z)=0且M(x,y,z)=0的解(pxn,pyn,pzn),ω1,ω2,ω3取ω1j,ω2j,ω3j,经过一次迭代得到K(pxn+1,pyn+1,pzn+1),若满足σ2且,则迭代点 (pxn+1, pyn+1,pzn+1)即为非线性方程组的解,若不满足,则判断是否成立,若成立,则继续向下迭代,若不成立,按照表3变换ω1,ω2,ω3可以得到七个候选迭代点。
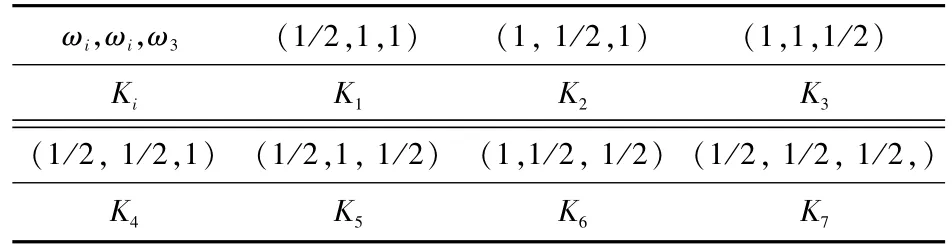
表3 迭代参数ωi与函数值Ki的关系

2.3 Taylor法的优越性比较
目前对于机器人运动学主要以广义几何法和方程组的数值解法为主。与广义几何法相、数值法相比较,该方法不需要考虑整个运动链,也不需要求解机器人的自然约束方程。由Taylor法的特性可知,得到的解必然满足
且由于并联机器人的特性可知,得到的解一定是唯一解。如果应用广义几何法,在考虑整个运动链的基础之上,列出机器人的自然约束方程,在求解过程中,需要求解一个只包含未知量t的8次多项式的方程[8]。由阿贝尔定理可知,超过5次以上的一元高次方程必须用数值方法进行求解,对初值的选择,虚根重根和增根和遗根等都要进行分类讨论,之后再一一处理,这无疑大大增加了求解的难度和复杂度。
3 并联机器人运动学分析
3.1 并联机器人结构特点
图2是三轴并联机器人的结构简图,K-ABC为动平台,3个球形副在同一平面上;O-GHI为固定平台,3个转动副(球形副)在同一平面上,且三角形ABC和GHI为正三角形,3条支链具有相同的结构形式。假设动平台的几何中心为K点,其在o-xyz坐标系中的坐标为(xk,yk,zk),动平台的外接圆半径为r,固定平台的外接圆半径为R。其中Lij、θij分别为第i支链上的第j杆的杆长和转角。
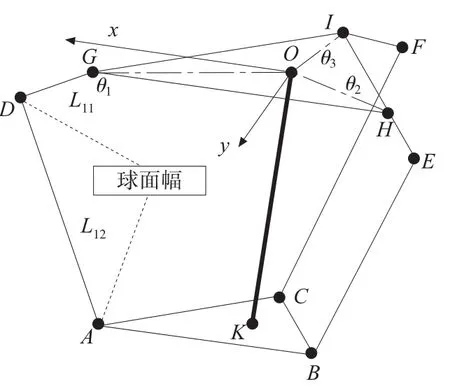
图2 三轴并联机器人机构图
3.2 运动学正反解问题
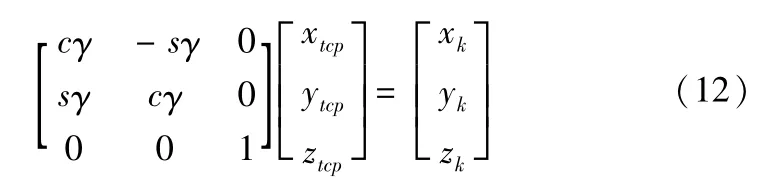
并联机器人运动学的正解问题,是已知各个驱动杆的转动角求解运动平台中心店的位姿,反解问题即是已知动平台中心点在空间中的位姿求得各个驱动杆的转动角的问题。设末端执行器中心的坐标为(xtcp,ytcp,ztcp),这样可以获得位置变换的坐标公式:
因为并联机器人的三条支链基本一致,所以在动平台位姿一定的情况下分析第一支链便可得到其他各个支链的解,因此对第一支链矢量闭环有方程:
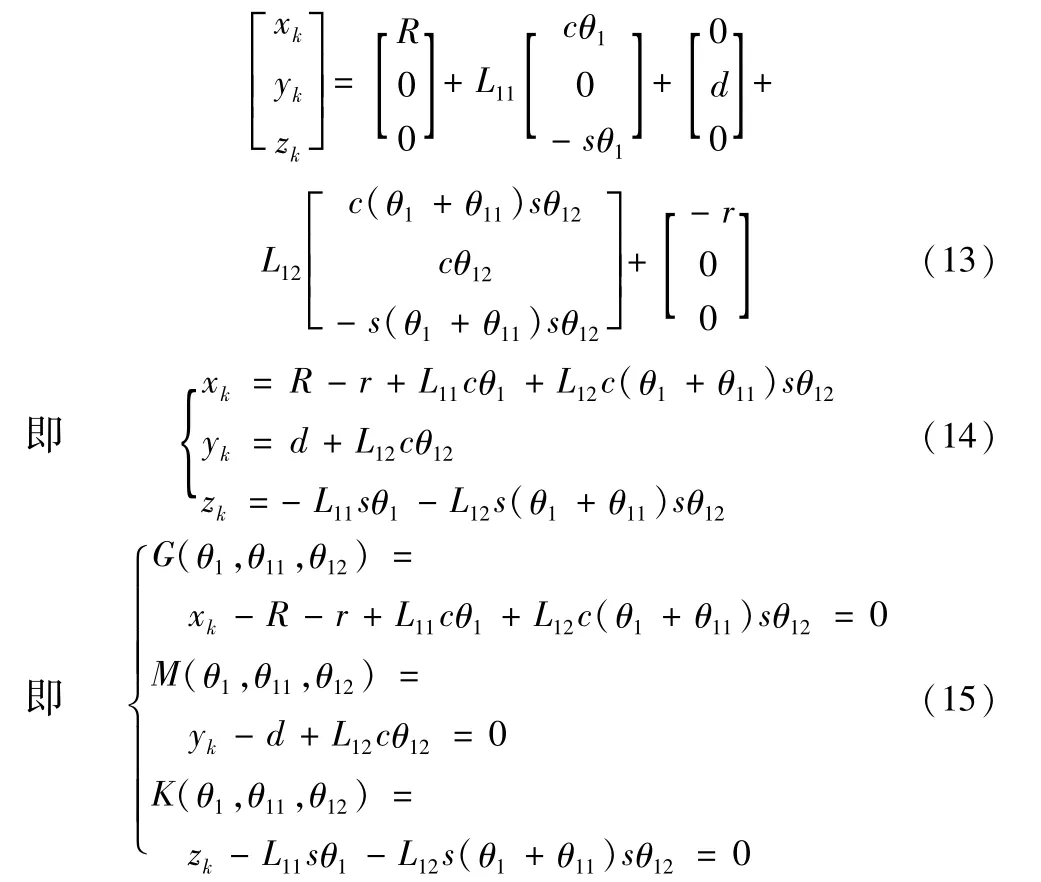
利用上述的算法求解,即可得到结果。
4 实验数据及分析
实验目的:证明算法的正确性以及优越性。
实验方法:使用正解验证和反解验证的方法。正解验证时输入八个初始点的输入角,得到位置正解、迭代次数以及相对误差,反解验证时根据正解时的八个位置反解出位置角度,两者具有很好的一致性。
我们又根据式(14)并联机器人反解模型验证所求得的正解信息,其反解结果如表5所示,对比表4和表5的结果可以看出,反解得出的角度和输入角度基本一致,验证了正反解算法的正确性。
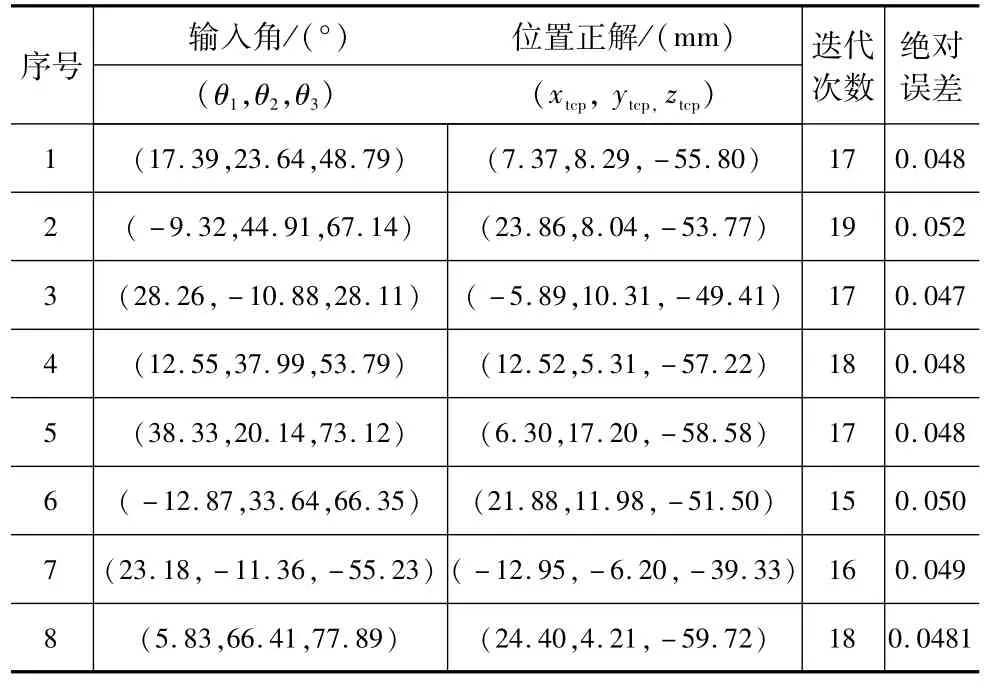
表4 轴并联机器人位置正解仿真结果
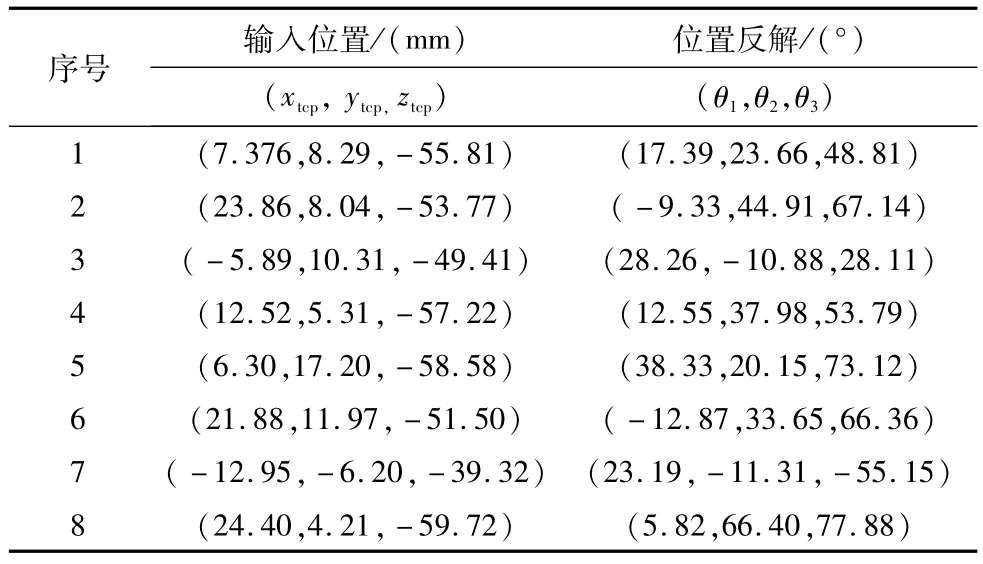
表5 轴并联机器人位置反解仿真结果
机器人运行如图3所示。

图3 运行中的机器人
实验结果:多元Taylor法迭代次数少,精度高,无需进行复杂的多解取舍过程,显示了极大的优越性。
5 结束语
针对并联机器人运动学正解封闭解问题,本文利用多元函数Taylor公式推导出了求解3轴并联机器人运动学正解的taylor迭代方法,同时推导了三元非线性方程组Taylor迭代方法的具体步骤,该方法有效地解决了多解情况下得取舍问题与运动学正解封闭解问题,大大提高了系统的鲁棒性,从实验可以看出,经过正反解验证,该方法经数次迭代后机器人位姿精度高,充分证明了该算法的正确性。
[1]刘振宇,赵彬,邹风山,等.MeanShift和Kalman算法在工件分拣中的应用[J].仪器仪表学报,2012,33(12):2796-2802.
[2]姚裕,吴洪涛,左健民,等.3-DOF SMLT并联运动学机器的工作空间解析研究[J].机械科学与技术,2003,22(5):776-778.
[3]Stefan Ulbrich,Vicente Ruiz de Angulo,Tamim Asfour,et al.IEEE General Robot Kinematics Decomposition Without Intermediate Markers[J].IEEE TRANSACTIONS ON NEURAL NETWORKS AND LEARNING SYSTEMS,2012,23(4):620-630.
[4]Honghai Liu,David J.Brown,George M.Coghill Fuzzy Qualitative Robot Kinematics[J].IEEE TRANSACTIONS ON FUZZY SYSTEMS,2008,16(3):808-822.
[5]Ying Hu,Jianwei Zhang,Zhong Wan,et al.Design and A-nalysis of a 6-DOF Mobile Parallel Robot with 3 Limbs[J].Journal of Mechanical Science and Technology,2011,25(12):3215-3222.
[6]M E Daachi,B Achili,B Daachietal.Neural Network Identification For a C5 Parallel Robot AIP Conference Proceedings[C].2008.[7]Lu Ren,James K Mills,Dong Sun.Performance Improvement of Tracking Control for a Planar Parallel Robot Using Synchronized Control[C].International Conference on Intelligent Robots and Systems October 9-15,Beijing:2006.
[8]王良文,唐维纲,王新杰,等;基于计算机复制几何法的多足步行机器人运动学分析系统[J].机械设计,2012,29(7):29-33.
[9]Boschetti,G,Rosa,R.Optimal robot positioning using taskdependent and direction-selective performance indexes:General definitions and application to a parallel robot[J].Robotics&Computer-Integrated Manufacturing,2013,29(2),431-443.
[10]FAN C X,LIU H Z.Kinematic Analysis of a novel three DOF parallel mechanism[J].Mechanical Science and Technology for Aerospace Engineering,2012,7(31):104-104.
[11]袁亮.基于状态估计的服务机器人主动感知系统的研究[J].组合机床与自动化加工技术,2014(5):73-82.
[12]陈琳,付兵,潘海鸿,等.一种适用于多机器人的动态包围体层次树碰撞检测算法[J].组合机床与自动化加工技术,2014(7):73-76.
The Rresearch of Parallel Robot Kinematics Based on Multiple Taylor Method
ZHANG Shao-fang,XU Xiao-zhao
(Department of Computer,Shijiazhuang Vocational Technical College of Posts&Telecommunications,Shijiazhuang 050021,China)
So far,the problem of Kinematics of the closed-form solution is still a technical problem,now the most popular method in reality is the use of numerical solution method and the generalized geometric equations method.However,the derivations of these methods are very complicated,and there isa problem of no unique solution in the process of solving equations.To avoid these problems,a triple nonlinear equation of parallel robot New ton iteration algorithm is deduced based on Taylor formula multivariate function,at the same time,Based on the mathematical principles,the anti-parallel robot solutions can be obtained.Taylor algorithm avoid multiple solutions trade-offs skillfully,get the solution that meet the exercise of continuity directly.As the rate of convergence,this algorithm is a very promising algorithm.
the nonlinear equation;new ton-iteration;the taylor formula;parallel robot;multiple functions
TH166;TG659
A
1001-2265(2015)06-0008-04 DOI:10.13462/j.cnki.mmtamt.2015.06.003
2014-08-19
河北省自然科学基金资助项目(E2013210115)
张少芳(1982—),男,河北宁晋人,石家庄邮电职业技术学院讲师,硕士,研究方向为网络安全与管理等技术,(E-mail)zhangshaofang102@sina.com;通讯作者:徐晓昭(1978—),男,河北衡水人,石家庄邮电职业技术学院讲师,博士,研究方向为计算机应用技术。
