马铃薯联合收获机清洁装置液压系统设计与阀控液压马达数学建模
2015-10-20张童等
张童等

摘要:为了解决传统马铃薯辊式联合收获机液压马达驱动清洁滚筒易停转的问题,提升收获机的工作效率、工作稳定性、经济性,以4UL-2型收获机为研究对象,在深入剖析清洁装置的结构和工作原理的基础上,设计了全新的伺服阀控液压马达调速换向系统。对阀控液压马达动力机构的传递函数进行了推导,对速度控制系统进行了数学建模并最终确立了该系统中各元件的参数值。
关键词:清洁装置;系统设计;数学建模;传递函数
中图分类号: S225.7+1文献标志码: A文章编号:1002-1302(2015)09-0444-04
马铃薯具有产量高、经济效益好、环境适应能力强等优点,目前我国马铃薯的种植面积和鲜薯产量均居世界首位。内蒙古自治区地域辽阔,土壤肥沃,全区种植马铃薯面积多达9 300万hm2,占全国的18%[1-2]。使用马铃薯收获机,不仅可减轻劳动强度,而且可提高收获效率、缩短收获时间,降低成本。近些年,我国马铃薯收获机发展迅速,典型机型有 4M-2 型,4UFD-1400型等[3-4]。但由于我国马铃薯种植地况的复杂性,现有机型均难以完全满足收获需求,特别是马铃薯清洁装置易被硬物卡死不能及时反转的现象尤为突出。对4UL-2型马铃薯收获机清洁装置存在反转卡死的现象进行研究,设计了新的伺服阀控制液压马达的伺服控制回路,有效地解决了液压系统工作不稳定的问题,对提高收获机的收获效率及加快马铃薯产业的发展具有重要意义。
1清洁装置的工作原理及不足
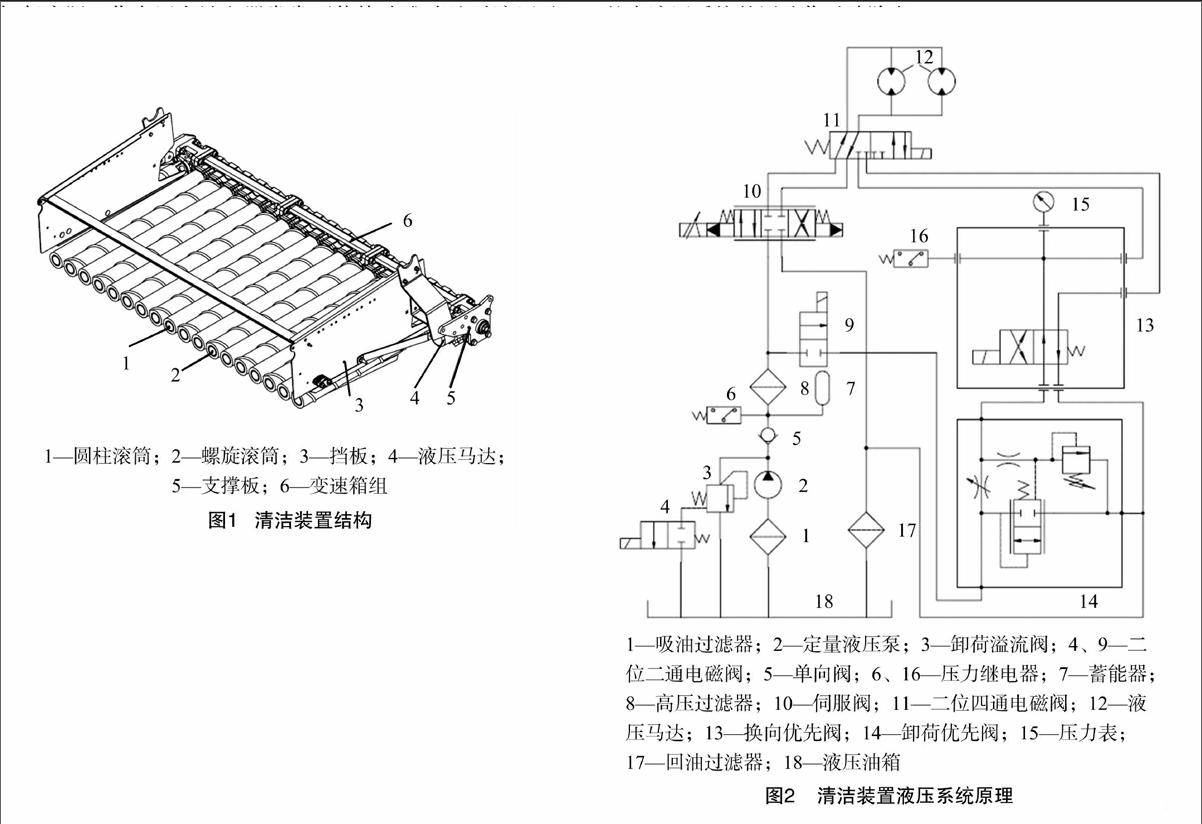
薯块清洁装置是清洁初收获薯块表面泥土、杂质的装置,是马铃薯联合收获机的关键组成部分。该装置结构如图1所示,由圆柱滚筒、螺旋滚筒、挡板、液压马达、支撑板、变速箱组6个部分组成。在工作过程中,液压马达通过增速变速箱组驱动由圆柱滚筒和螺旋滚筒组成的橡胶清洁滚筒,带动薯块进行旋转、摩擦,从而实现薯块及其表面泥土的分离。薯块清洁滚筒的间隙为12 mm,狭小的滚筒间隙不仅可以避免薯块从滚筒间脱落,而且可避免泥土等杂质的堆积[1]。
4UL-2型马铃薯收获机正常工作状态可高效地实现马铃薯地收获,但在内蒙古很多种植区土壤中存在大量不规则石子,当其径向尺寸大于12 mm时,经常会出现石子阻止清洁滚筒转动的现象,使滚筒的转速降低、割伤橡胶层,甚至清洁滚筒会完全被石子卡住。此时,马达进油管路中油压迅速升高,压力继电器应该快速根据油压作出响应,实现马达反转,但实际工作中压力继电器常常不能快速准确地对液压马达停转时进油管路中的高压油作出反应,使溢流阀不能及时卸荷,这就容易造成液压系统压力过高甚至损坏[1,5]。
2液压系统设计
为了解决上述缺陷,需要研究一种新的液压马达自动换向系统,实现动态的液压马达转速检测及反馈,使液压马达可快速进行转向切换,从而实现收获机清洁装置持续稳定的工作。为此设计图2所示的马铃薯收获机清洁装置液压系统,该液压系统主要由2个部分组成,右半部分为原有的普通液压马达换向系统,一般不工作;左半部分是设计的全新液压伺服调速系统。
该系统的工作原理如下:左侧系统:收获机在作业中由发动机功率为70 kW的拖拉机进行牵引,油箱18中的液压油经吸油过滤器1过滤后进入由输出轴驱动的定量液压泵2,使低压液压油变为工作所需的高压液压油。高压液压油经过高压过滤器8,将液压油中的杂质进一步过滤,保证更加清洁的液压油进入到伺服阀10,高压液压油经过二位四通电磁阀11的左腔,进而驱动液压马达12实现正转。当清洁滚筒被不规则石子卡住时,液压马达将停转,这时检测清洁滚筒转速的测速机将检测到的速度信号与给定的指令信号比较,实现伺服阀阀芯位置的移动,液压油从伺服阀的右腔流入,从而实现液压马达的反转及清洁滚筒的换向工作,保证了清洁装置的正常运行。该系统中其他元件还有单向阀5,可以防止收获机停车时发生清洁装置液压系统液压油倒流,对液压马达及清洁滚起到制动作用;蓄能器7可以对整个液压系统多余的液压能实现储存,当蓄能器储能饱和后,系统的压力升高,这时压力继电器6得电使二位二通电磁阀4动作,进而使卸荷溢流阀3卸去多余的液压能,实现整个液压系统的恒压工作。
右侧系统:当伺服调速换向系统不能正常工作时,手动按下二位二通电磁阀9和二位四通电磁阀11动作的按钮,实现阀芯移动,切换到液压系统原理图的右半部分,保证清洁装置中的清洁滚筒按照原有收获机的液压系统正常工作。压力表15对供油压力实时监控,当清洁滚筒被石子卡住使得液压马达供油压力显著升高后,这时压力继电器16得电使换向优先阀13动作,保证清洁装置中驱动清洁滚筒的液压马达反转,实现清洁装置正常运行。卸荷优先阀14的主要作用是对流经液压马达换向系统中的液压油实现恒压,回油过滤器17对整个液压系统的回油作过滤除杂。
3控制系统原理分析
伺服阀控液压马达是上述液压系统的核心,因此有必要对其控制系统进行原理分析。伺服阀控液压马达的原理如图3所示,它由伺服放大器、电液伺服阀、液压马达、测速机等组成。测速机作为清洁装置液压控制系统的反馈检测元件,用于控制液压马达驱动清洁滚筒的转速,使之按照给定的指令信号变化,利用测速机的测速轴与清洁装置中清洁滚筒轴相连接,将检测到的速度信号与指令信号差(误差信号)经伺服放大器进行功率放大,产生的电流控制电液伺服阀阀芯的位置,电液伺服阀输出压力油驱动液压马达,带动清洁滚筒旋转。
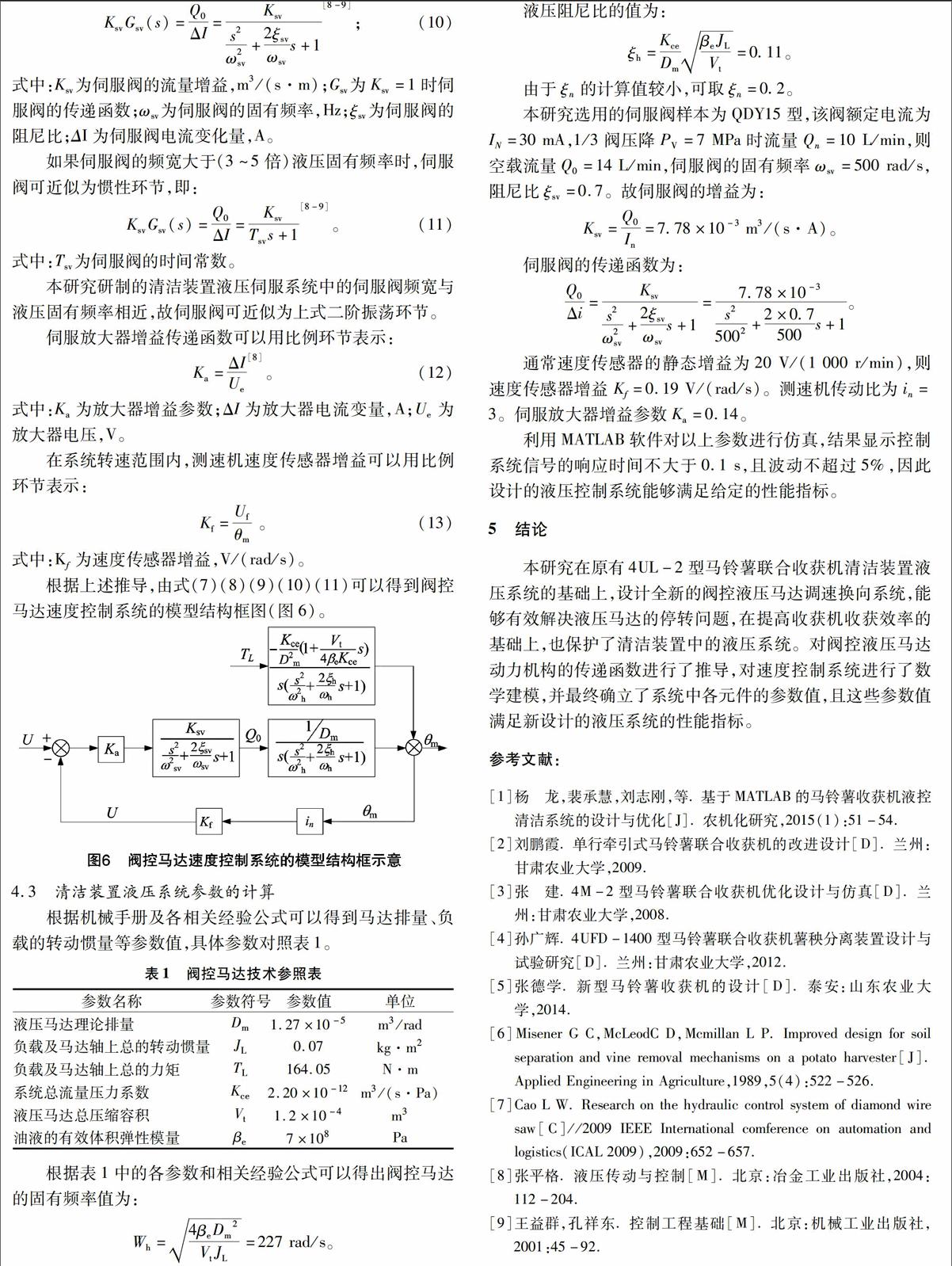
根据阀控液压马达速度伺服系统原理中给出的清洁滚筒换向控制方案,阀控液压马达速度伺服控制系统方框图(图4)更加简明地描述了清洁装置中清洁滚筒的换向工作流程,为液压系统的数学建模及参数确定奠定基础[1]。
4阀控液压马达数学建模
4.1阀控液压马达动力机构传递函数的推导
阀控液压马达的传递函数是根据液压控制阀的流量方程、液压马达的流量连续性方程、液压马达与负载的力平衡方程这3个基本方程推导出来的。endprint
假定:控制零开口四边滑阀的4个节流窗口是匹配对称的,供油压力Ps恒定,回油压力P0为零。阀的线性化流量方程为:
qL=KqXv-KcPL 。(1)
式中:qL为负载流量,m3/s;Kq为流量增益,m3/(s·m);Kc为流量-压力系数,m3/(s·Pa);Xv为阀芯位移,m;PL为负载压力。
假定:阀与液压马达的连接管道对称且短而粗,忽略管道中的压力损失和管道动态;马达工作腔内各处的压力相等,油温、体积弹性模量为常数;液压马达内、外泄漏均为层流动。根据进入液压马达进油腔的流量q1和回油腔中流出的流量q2以及液压马达2个工作腔的容积V1、V2,可得出流量连续性方程,经合理的简化后该方程为:
则速度传感器增益 Kf=0.19 V/(rad/s)。测速机传动比为in=3。伺服放大器增益参数Ka=0.14。
利用MATLAB软件对以上参数进行仿真,结果显示控制系统信号的响应时间不大于0.1 s,且波动不超过5%,因此设计的液压控制系统能够满足给定的性能指标。
5结论
本研究在原有4UL-2型马铃薯联合收获机清洁装置液压系统的基础上,设计全新的阀控液压马达调速换向系统,能够有效解决液压马达的停转问题,在提高收获机收获效率的基础上,也保护了清洁装置中的液压系统。对阀控液压马达动力机构的传递函数进行了推导,对速度控制系统进行了数学建模,并最终确立了系统中各元件的参数值,且这些参数值满足新设计的液压系统的性能指标。
参考文献:
[1]杨龙,裴承慧,刘志刚,等. 基于MATLAB的马铃薯收获机液控清洁系统的设计与优化[J]. 农机化研究,2015(1):51-54.
[2]刘鹏霞. 单行牵引式马铃薯联合收获机的改进设计[D]. 兰州:甘肃农业大学,2009.
[3]张建. 4M-2型马铃薯联合收获机优化设计与仿真[D]. 兰州:甘肃农业大学,2008.
[4]孙广辉. 4UFD-1400型马铃薯联合收获机薯秧分离装置设计与试验研究[D]. 兰州:甘肃农业大学,2012.
[5]张德学. 新型马铃薯收获机的设计[D]. 泰安:山东农业大学,2014.
[6]Misener G C,McLeodC D,Mcmillan L P. Improved design for soil separation and vine removal mechanisms on a potato harvester[J].Applied Engineering in Agriculture,1989,5(4):522-526.
[7]Cao L W. Research on the hydraulic control system of diamond wire saw[C]//2009 IEEE International comference on automation and logistics(ICAL 2009),2009:652-657.
[8]张平格. 液压传动与控制[M]. 北京:冶金工业出版社,2004:112-204.
[9]王益群,孔祥东. 控制工程基础[M]. 北京:机械工业出版社,2001:45-92.endprint