船舶操纵模拟试验在航道设计方案比选中的应用研究
2015-10-18仲彦,孟然
仲 彦,孟 然
(中海油天津液化天然气有限责任公司 天津 300452)
0 引 言
港口和航道的设计问题一般涉及两个学科,即港口工程学和航海技术学。涉及到港口工程的问题有水文、地质环境勘测、泥沙运动情况分析及平面规划和建筑物设计等。涉及到航海技术的问题传统上主要是考虑船舶运动的空间,如回旋水域、疏浚水深、进港航道尺度等,这些尺度的确定主要根据已有的各种规范和航海者经验来判定。上述传统方法对于各种环境影响,特别是各种环境因素组合在一起时的船舶操纵安全性、合理性很难作出评价,使得从船舶运动角度对港口、航道进行优化设计受到限制。
随着船舶操纵模拟及计算机多媒体技术的发展,近年来船舶操纵模拟已越来越多地应用于港口航道的平面设计中,船舶操纵与各种环境动力模拟相结合,能够使港口和航道的设计更为合理。[1-3]
天津 LNG项目需要新建 LNG泊位两个,其中一个用于停靠 FSRU(浮式接收储存气化装置,即带有气化装置的 LNG船),另一个用于停靠 LNG 船接卸 LNG。该项目码头工程布置在天津港南疆南侧岸线东端,码头前沿距南防波堤轴线70,m,码头与陆域之间以引桥连接。LNG及 FSRU泊位采用蝶形墩台式布置,每个泊位设置 1座工作平台、4座靠船墩和6座系缆墩。每个泊位长度均为 400,m,两个泊位间距 50,m,码头总长度为 850,m。工作平台顶面高程 8.0,m,靠船墩及系缆墩顶面高程为 6.5,m。码头前沿停泊水域宽度为 150,m,设计底高程-14.5,m。旋回圈直径为 865,m,设计底标高为-15.0,m。
本项目航道连接港池区域考虑两个设计方案,两个方案在船舶操纵、通航安全及投资方面均有较大差异,需要进行方案比选。总体上,航道设计时所要求的指标主要为航行水域的宽度、水深、通航条件、净高度等,而这些指标受到船速、舵角、船舶操纵性能、风、浪、潮汐等外界条件和操纵人员技能以及各项指标互相关联作用的影响。因此,本次试验通过船舶操纵模拟,借助模拟结果获得的相关数据和资料,评估各航道设计方案的确定因素(航行水域的宽度、水深、通航条件等)和不确定性因素(船舶操纵性能、风、浪等),分析各方案的合理性以确定最终推荐方案。[4-5]
1 航道设计方案简介
根据方案一(见图1),码头方向(按照出港航向)为107,°,港池方向为 148,°,口门内航道为 109,°,口门外航道为 126,°。船舶回旋水域位于码头前沿,其直径为865,m。

图1 航道设计方案一Fig.1 Design Scheme A
方案二主要对港池的疏浚北边线进行了扩宽(见图2)。对航道进行了切角,航道与港池连接处呈喇叭口形状,喇叭口上口宽度为 635,m,下口宽度为 375,m,喇叭口下口与外航道夹角为 8,°。
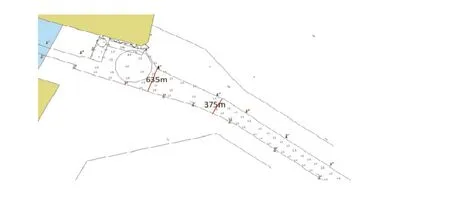
图2 航道设计方案二Fig.2 Design Scheme B
2 船舶操纵模拟试验方案
试验所用的全任务大型船舶操纵模拟器采用英国Transas公司的Navi-Trainer型,符合国际海事组织(IMO)STCW78/95公约及国家海事局的相关要求,获得挪威船级社(DNV)、英国海运安全局(MSA)、英国劳氏船级社(Lloyd's Register)等权威机构的认证。设备包括教练站、4个本船(1个主本船和3个副本船)及 40套桌面系统,主本船为 7通道 270,°弧形柱面视景,副本船为3通道 120,°视景。系统由综合船桥驾驶台(IBS)模块、船舶控制模块、雷达/ARPA模块、电子海图显示与信息系统(ECDIS)模块、全球海上遇险与安全系统(GMDSS)模块、导航仪器模块、视景系统模块、音响模拟模块等构成,包括船舶动态软件、三维视景软件、教练监控软件、视景及船模开发软件、实物驾驶台硬件和基于网络分布式处理计算机系统。
该全任务大型船舶操纵模拟器具有以下主要特点:①能够完成不同天气及能见度(晴天、多云、阴天、雾、雨等)、不同海况(风、浪、流等)、不同时间(白天、昼夜连续可变)条件下的航行、操纵模拟。②使用助航仪器、雷达/ARPA、电子海图显示与信息系统(ECDIS)、无线电通讯等为一体的综合智能导航模拟。③采用六自由度(前后、侧移、船首向变化、纵摇、横摇、垂荡)船舶水动力数学模型的基础上,能真实地模拟本船在开阔水域的水动力学特征(包括气象、潮汐、流的影响),能真实地模拟本船在受限水域的水动力学特征(包括浅水、岸壁和船间效应),能真实地模拟本船在锚、车、舵、缆、拖轮作用下的响应。
同时,在模拟器上整合了拖轮子系统,拖轮的操作可以指定到主本船或任何 1个副本船,在指定的拖轮操作船台上,操作人员可以像操作主本船一样,而且可以与被拖带船舶用VHF或对讲机通信以达到交互和联动,在目标拖轮上的视景显示同样采用三维 120,°或 270,°的视景显示。在力学模型上拖轮子系统和靠离泊子系统中,能根据当前的风流等海况条件实时计算各个拖轮和各条缆绳的受力情况。
试验船型选取天津 LNG一期主力145,000,m3LNG船,参加试验的主要人员为天津港引航中心高级引航员、LNG船长、大副及拖轮船长等。根据该水文气象统计资料及天津港引航中心高级引航员和 LNG船长的经验,选取风向为 NE、SW风,风速6~7级,涨潮,流速0.3~1.2,kn为试验工况。根据工程现场情况及高级引航员经验,船舶进港靠泊 LNG泊位(东侧泊位)时更难操作且对航道要求更高,因此本次试验以船舶进港靠泊LNG泊位为主要研究工况。[7,8]
3 试验结果及分析
方案一仅进行了两组试验(见图 3),试验结果显示,在涨潮、风向为 NE的情况下,引航员尚可以通过操作使船舶勉强通过航道与港池相接触,但在涨潮、风向为 SW 的情况下,引航员无法通过操作船舶克服西南风对船舶产生的向北的影响,易出现搁浅事故。通过试验可以看出,方案一存在的问题是转向较多,在约 1,000,m(不到 3倍设计船长)的范围内需要拐弯两次,一个弯约 40,°,一个弯约 20,°,船舶航迹呈“S”形,船舶操纵困难,容易出现危险状况。

图3 方案一试验结果Fig.3 Experimental result of Scheme A

图4 方案二试验结果Fig.4 Experimental result of Scheme B

表1 船舶操纵模拟试验结果Tab.1 List of simulation test results
方案二(见图4)对港池与航道连接处进行了切角,切角后航道与港池连接处呈喇叭口形状,喇叭口上口宽度为 635,m,下口宽度为375,m,喇叭口与外航道夹角为8,°,使得船舶可以安全驶过该区域,方案二在设定的风流条件下,船舶进出港都比较容易。
4 结论与建议
根据试验结果(见表1)分析,方案一对于涨潮、西南风 6级情况下进港操船,存在搁浅隐患,因此对港池及航道相接喇叭口处的拓宽是必要的。方案二在扩宽喇叭口后,船舶在风力及水流作用下向北漂移后,可借助扩宽后的区域安全航行。此外,方案二也满足其他条件下的靠离泊要求,因此方案二为推荐方案。
在航道设计方案比选过程中,聘请具有丰富引航经验且十分了解当地水文气象的引航员及熟悉船舶操纵特性的LNG船长参与船舶操纵模拟试验,从实践出发获取数据并确定推荐方案,使航道设计更加适应实际操纵特点,能够保证设计方案符合水上交通安全的要求。■
[1] 张庆河,李炎保. 船舶操纵数学模型在港口航道设计中的应用[J]. 中国港湾建设,2000(1):49-53.
[2] 钱华忠. 船舶操纵模拟器在港航设计论证上的应用研究与设计[D]. 大连:大连海事大学,2002.
[3] 张秀凤,金一丞,尹勇,等. 航海模拟器在港口工程设计中应用[J]. 航海技术,2004(增):22-25.
[4] 边晓丽. 船舶操纵模拟在航道设计中的应用[J]. 中国水运,2006(3):48-49.
[5] 边晓丽. 海港航道设计宽度模拟试验研究[J]. 水运工程,2013(9):99-102.
[6] 焦彦波,于庆峰. 日照港30万t级原油码头航道船舶操纵模拟试验研究分析[J]. 水运工程,2006,(3):32-35.
[7] 徐元,邓健,严庆新. 基于航海模拟器仿真的码头工程通航评估[J]. 船海工程,2008,37(3):84-86.
[8] 黄立文,张蔚,严庆新,等. 船舶操纵模拟器在桥梁/船闸通航方案论证中的应用[J]. 船海工程,2007,36(4):91-93.
