非线性积分滑动面的农业车辆转向系统控制
2015-09-10张琦张柯
张琦 张柯

摘要: 自动转向控制是实现农业车辆自动导航控制的关键技术,为了提高转向性能和精度,提出了1种基于非线性积分滑动面的自适应滑模控制方法。先将农业车辆的转向系统假定为1个二阶的数学模型,并将系统中的不确定性因素和难以建模的外部干扰动力学系统假设为可满足边界条件的等效干扰;针对每个导航控制周期构建所需系统响应的瞬态过程,设计了1个非线性积分滑动面;同时根据闭环转向控制系统提出相应的滑模控制规则,确保系统能够获得迅速无超调量的闭环响应曲线,并利用模糊控制实现了滑模控制增益的自适应切换。仿真试验表明,设计的非线性积分滑动面的自适应滑模控制方法对提高农业车辆转向控制系统的平稳性、精度具有重要意义。
关键词: 自动转向控制;非线性积分滑动面;自适应滑模控制;模糊控制;农业车辆
中图分类号: TP273+ 2 文献标志码: A
文章编号:1002-1302(2015)08-0391-03
农业车辆的自动导航在实现农业自动化作业中发挥着重要作用,如自动播种、除草施肥、农药喷洒、作物收割等领域 [1],其中农业车辆自动转向控制系统是实现自动导航作业的核心技术 [2]。目前,农业车辆自动转向系统主要分为马达直接驱动转向盘、电液转向控制回路2种驱动方法 [3]。连世江分别研制了基于永磁无刷直流电机驱动机构的转向控制方法,并通过自适应比例-积分-微分(proportion-integral-differential,PID)增益获得较为满意的控制效果 [4]。为了提高控制器的控制精度,吴晓鹏等设计了1种闭环PID控制系统,尽管能够提高控制器的控制精度,但转向角速度的测量则非常困难 [5]。为此,本研究提出了1种基于非线性积分滑动面的自适应滑模控制方法,能够确保转向控制系统获得快速和无超调的响应特性,有效缓解了传统滑模控制中存在的控制输入颤振现象。
1 农业车辆转向控制问题的描述
用于现代化、自动化及精细化农业的农业车辆,其典型的自动导航控制系统通常包括导航控制器、位置和方位传感器、转向角度传感器、转向驱动器等部分 [6]。自动导航控制系统的原理如图1所示。
导航控制器根据车辆当前位置、方向、路径等信息决定所需转向角度的命令,并发送该转向角度的命令到转向控制器。自动转向控制器是实现自动导航控制精度的关键。农业车辆自动转向系统的原理如图2所示。
3 仿真试验
考虑到农田地形相对复杂,农业车辆在工作的过程中,会受到很多外力和自身因素的影响,因此难以建立合理的车辆数学模型。根据自动控制理论,可令非线性积分滑动面的数学模型(1)中的参数kg=50,τ=0 09s。且在本研究的仿真试验中,设定等效干扰如下:
D(x)=Γe -[(t-ud)/[KF(]2[KF)]σd]2。 (18)
式中:μd=5,σd=0 5,Γ=20;瞬态过程实际t=0 3 s;非线性积分滑动面参数c1=64,c2=8,λ=24;最小、最大阻尼分别为ζmin=0 5、ζmax=0 5;阶跃输入命令δd=0 1rad。
通过仿真试验获得本研究所提出的基于非线性积分滑动面滑模控制的阶跃响应曲线,并且在相同的参数条件下与传统滑模控制的阶跃响应曲线进行分析比较,传统滑模控制、自适应滑模控制的阶跃响应曲线如图3、图4所示。
由图3可知,传统滑模控制的上升时间约为0 3 s,稳态时间>1 0 s,且其超调量>20%。但如果使用本研究提出的新型滑模控制获得相同的上升时间时,其稳态时间<0 5 s,且几乎没有超调量(图4)。仿真结果表明,非线性积分滑动面阻尼单调增加的特性保证了转向系统以相对较小的阻尼加速输出响应的速度,也确保了转向系统具有较高的阻尼,避免输出超调量,减少稳态时间。
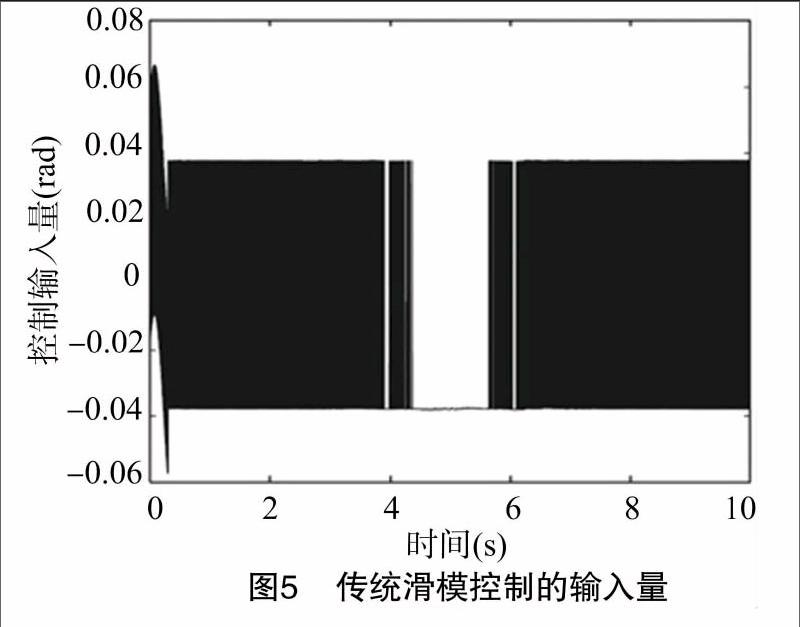
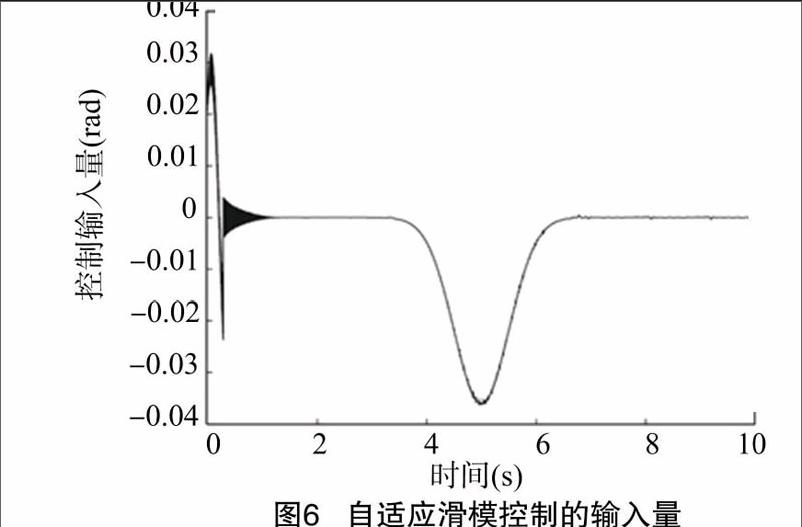
此外,虽然传统的滑模控制方法可以通过选择1个足够大的固定切换增益确保控制系统的稳定性,但较大的切换增益会使系统产生较大的控制力和严重的颤振现象,其控制输入量如图5所示。本研究的模糊控制方法能够通过自适应调节滑模控制的切换增益η,从而消除颤振现象、减小控制力,其控制输入量在与图5对应的时间范围内不存在高频振荡(图6)。
从图5中可知,普通滑模控制的输入量在0~4 s、6~10 s的时间范围内存在高频的大幅振动,振幅约为0 04 rad,即所谓的颤振现象,这对于控制系统来说是一个致命的缺陷。通过对比分析,在相同的条件下,2种滑模控制方法的控制输入量表现出完全不同的平稳特性。自适应模糊滑模控制对于消除传统滑模控制中存在的输入颤振现象效果明显,这对于提高农业车辆转向控制系统的平稳性和精度具有重要的意义。
4 结论
本研究提出的用于农业车辆自动导航的自适应滑模控制方法,在系统不确定和外界干扰的情况下,可有效提高转向系统控制的响应速度和精度。在每个导航控制周期中,为了避免转向驱动器子系统产生大的初始冲击力,构建了1个瞬态变化的转向角代替恒定的转向角,并提出了1种基于瞬态过程的非线性积分滑动面。该系统不仅具有传统积分滑动面所具有的优点,还具有单调上升的阻尼比,使得闭环转向系统能够以较小的阻尼比加快输出的响应速度,而且可利用其大阻尼比的特性来消除系统输出的超调量。通过仿真试验表明,自适应滑模控制方法具有变阻尼比的特性,使得转向控制系统不仅能够获得迅速而无超调量的闭环响应曲线,还减缓了系统控制输入的颤振现象,增强了系统的稳定性。
参考文献:
[1] 张广庆,朱思洪,李伟华,等 铰接摆杆式重型拖拉机线控转向系统仿真与试验[J] 农业机械学报,2014,45(2):28-33
[2]周 慧,鲁植雄,赵苗苗 基于模糊PID的线控液压转向系统仿真分析[J] 农机化研究,2013,35(10):194-198
[3]罗锡文,张智刚,赵祚喜,等 东方红X-804拖拉机的DGPS自动导航控制系统[J] 农业工程学报,2009,25(11):139-145
[4]连世江 农用车辆自动导航控制系统研究[D] 杨凌:西北农林科技大学,2009
[5]吴晓鹏,赵祚喜,张智刚,等 东方红拖拉机自动转向控制系统设计[J] 农业机械学报,2009,40(增刊1):121-124
[6]彭秋菊,郭永丰 电动助力转向系统扭矩信号采集系统设计[J] 自动化与仪表,2011,36(8):58-61
[7]Más F R,Zhang Q,Hansen A C Mechatronics and intelligent systems for off-road vehicles[M] Berlin:Springer,2010
[8]谭光兴,李 珊,简文国,等 线控转向系统路感模拟控制研究[J] 计算机测量与控制,2014,22(4):1069-1072
[9]张 兵,黄文生,王 荣 基于可编程逻辑控制器的智能化灌溉控制系统研究[J] 江苏农业科学,2013,41(6):374-376
[10] 张成涛,谭 彧,吴 刚,等 谷物联合收割机电控全液压转向系统建模与仿真[J] 农业工程学报,2013,29(20):11-17endprint