应用nRF24L01设计的智能灭火小车
2015-07-09王福平等
王福平等
摘 要: 在此的设计采用AT89S52单片机,由nRF无线通信模块,多传感器检测模块,灭火设备模块和电源驱动模块组成。通过烟雾报警系统的无线发射模块与智能灭火车本身的无线接收模块之间建立的的无线通信迅速得到房间着火的信号,然后启动相应程序,通过超声波传感器测距检测前进,红外传感器寻找火源,实现完整的灭火过程。
关键词: nRF无线通信; 多传感器综合运用; At89s52;智能灭火
中图分类号: TN964?34 文献标识码: A 文章编号: 1004?373X(2015)08?0019?03
Intelligent fire car designed with nRF24L01
WANG Fu?ping, TANG Xiao?hu, ZHU Ling
(Beifang University of Nationalities, Yinchuan 750021, China)
Abstract: The AT89S52 single chip microcomputer is used in design of the intelligent fire car, which is composed of nRF wireless communication module, multi?sensor detection module, firefighting equipment module and power dri?ving module. The signal indicating that a room is firing can be quickly got through the wireless communication chan?nel between wireless transmitting module of smoke alarm system and wireless receiving module mounted in the intel?ligent fire fighting car, in which the corresponding program is start up, and the distance to the firing room is detected by ultrasonic sensor. The intelligent fire fighting car looks for the fire source according the instruction of its infrared sensor, and achieves the complete process of extingiushment.
Keywords: nRF wireless communication; multi?sensor integrated use; At89s52; intelligent extingiushment
随着国家与社会的发展,经济迅速增长,各种危险场所火灾频繁出现,会给社会和人民造成重大的损失和伤害。消防救援人员就算速度再快,但也需要一段不少的时间。回顾以往惨痛的火灾案例,当消防人员到来时,火势往往已经蔓延增大,损失也不可挽回。由此智能灭火车的必要性不言而喻。
1 总体设计思路
本设计是利用AT89S52单片机制作的智能灭火小车,可实现从收集着火信息到搜索火源再到灭火全过程。采用后轮驱动,左右后轮各用一个直流电机驱动,利用PWM(脉宽调制)技术[1]动态控制电机转动方向和转速,首先利用各传感器采集信息,通过软件编程,实现机器人的灭火功能
2 硬件系统的结构设计
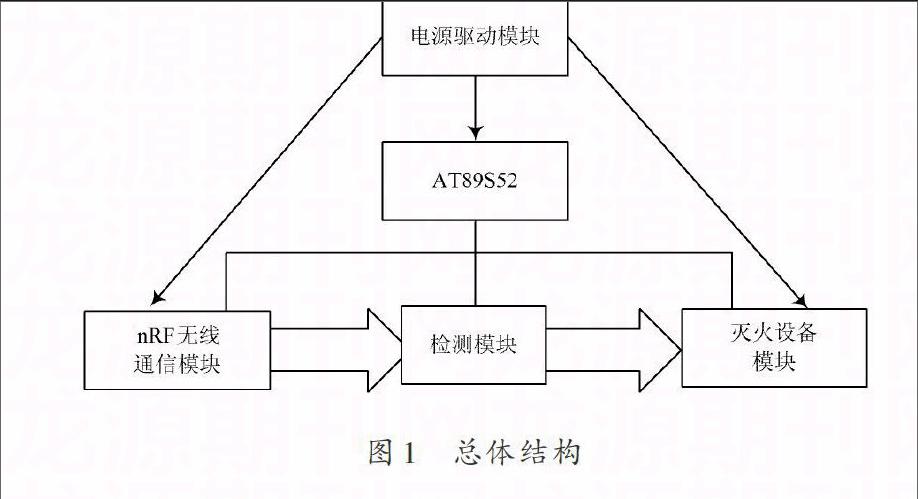
制作机器人选择的是AT89C52单片机,可以说它是增强型的80C51。是一种低功耗、高性能的微控制器,具有8 Kb的系统可编程FLASH存储器,拥有8位CPU[2]。灭火车的硬件结构分为NRF无线通信模块、多传感器检测模块、电源驱动模块、灭火设备模块。其总体结构如图1所示。
2.1 nRF无线通信模块
设计选择的nRF24L01是单片射频收发芯片,通过它实现该设备的自动启动,在智能灭火车上,将其设置为无线信号接收模式,将模拟的房间内烟雾报警系统的无线通信模块设置为发射模式,该芯片工作于2.4~2.5 GHz ISM频段[3],芯片内置频率合成器、功率放大器、晶体振荡器和调制器等功能模块,输出功率和通信频道可通过程序进行配置。芯片能耗非常低,以-5 dBm的功率发射时,工作电流只有10.5 mA,接收时工作电流只有18 mA。
2.2 电源驱动模块
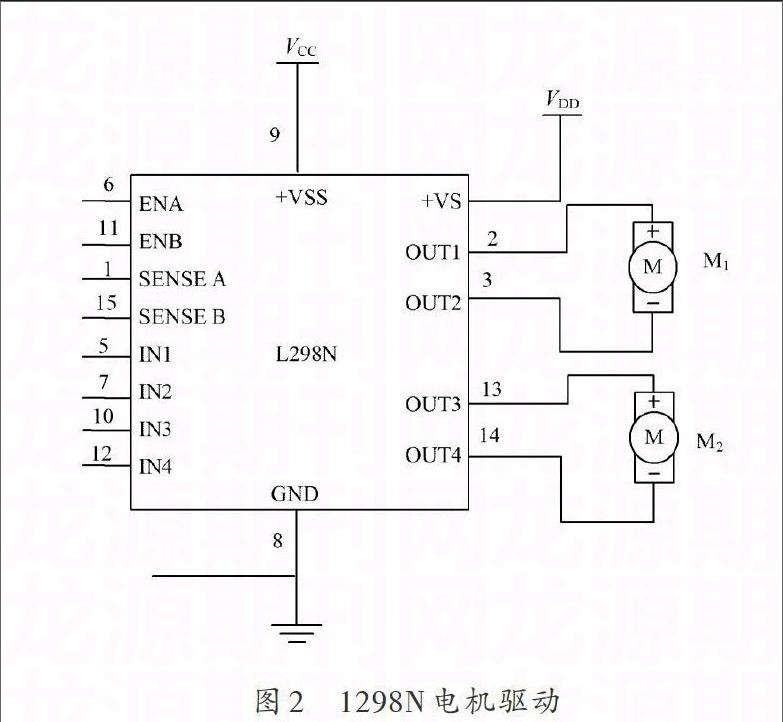
智能灭火车的电机采用L1298N芯片驱动。L298是专用驱动集成电路,属于H桥电路,其内部包含四通路的逻辑驱动电路[4]。可以直接对电机进行驱动,无需隔离电路,并且可以同时驱动如图2的M1,M2两个电机。
2.3 检测模块
检测是灭火机器人看周围环境的过程也就是机器人的眼睛,主要分为寻迹检测测与火源检测,需要用到的传感器有超声波传感器,远红外火焰传感器。
2.3.1 寻迹检测
机器人灭火比赛中主要采用沿墙走寻迹算法,用HC?SR04的超声波传感器测距感知墙壁的距离[5],当与墙壁的距离大于某一范围时则判定为通路,小于某一范围时则表明检测方向阻塞,从而控制机器人实现转弯、直走、沿墙走的功能。
2.3.2 火焰检测
远红外火焰传感器是利用红外敏感元件对红外信号强度的检测强度将其转化为机器人可以识别的信号从而检测火焰信号,远红外火焰传感器可以用来探测波长在700~1 000 nm范围内的红外线,探测角度为60°。其中红外线波长在880 nm范围内其灵敏度达到最大[6]。灭火机器人小车前部装有4个远红外火焰传感器,当进入某一房间后,传感器会迅速收集来自周围的环境信息。若收集到火源发出的红外光,根据光的强弱判断正确的方向,机器人迅速上前将火熄灭,如果没有检测到红外信息则通过寻迹检测驶出房间,并继续行进,进入下一个房间,直到发现火源并将其熄灭为止。
2.4 灭火设备模块
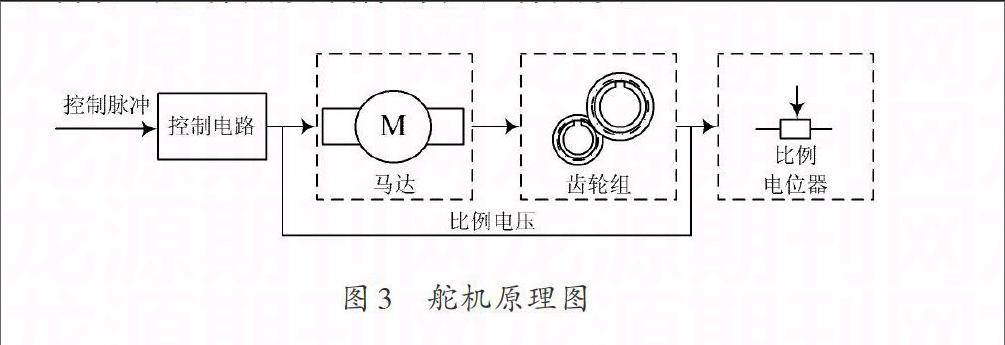
设计采用风扇灭火,由舵机控制转向,电机带动扇叶转动。舵机是一个微型的伺服控制系统 其工作原理如图3所示,它是由控制电路接收信号源的控制脉冲,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
3 系统软件设计
3.1 软件流程图简述
家用型灭火机器人在开始后处于初始化待机状态当nrf无线接收模块接收到某一房间内发出的灭火信号后,便开始搜索火源。找到火源后通过灭火装置迅速将火灭掉,然后停止前进。根据以上描述,设计的机器人灭火程序流程图如图4所示。
3.2 部分源程序
}
4 结 语
本设计的智能灭火车实现显现实情况下灭火的全过程,在多次模拟家庭灭火实验中基本达到了预期效果,能够在收到着火信息后搜索火源并实施灭火,有待改进的地方主要是搜索过程不流畅,易被小障碍物干扰,程序需进一步优化,优化算法提高单片机处理速度。
参考文献
[1] 郭天祥.新概念51单片机C语言教程[M].北京:电子工业出版社,2013.
[2] 张平,赵光霞.AT89S52单片机基础项目教程[M].北京:北京理工大学出版社,2012.
[3] Nordic Corporation. nRF2401 Product Specification [R]. [S.l.]: Nordic Corporation, 2008.
[4] 宋健.基于L298的直流电动机PWM调速器[J].潍坊学院学报,2004(4):87?89.
[5] 苏琳.基于HC?SR04的超声波测距器的设计[J].科技信息,2012(9):124?125.
[6] 张新.森林火灾实时监测系统火焰探测模块的研究[D].北京:北京林业大学,2011.
