基于单片机的机电调平试验系统研究
2015-07-07张付祥陈万军孙书鹏
张付祥,陈万军,孙书鹏
(河北科技大学 机械工程学院,石家庄 050018)
0 引言
很多特殊用途的工程车辆在工作之前要先进行精度较高的水平调整,要求调平速度快,自动化程度高,还要可靠性高。过去主要采用手工调平,由多人反复操作调节支腿,通过观察气泡达到水平,这种方法不仅调节时间长,而且精度低[1]。目前调平系统应用较多的是采用液压调平,但液压调平系统也有诸多缺点,如调平时间较长、响应迟钝、漏油、成本高、维护困难等问题。机电调平相比比液压调平优点是调平时间短,精度高,可靠性好等[2]。
1 单支腿机械结构
本文提出一种基于单片机的机电式自动调平试验系统,调平支腿主要由驱动电机、减速器、丝杠螺母、内外套筒、限位螺钉以及行程开关组成,结构原理如图1所示。支腿通过控制驱动电机的起停以及转向将动力和转矩输出,由锥齿轮传递进行减速,同时将力矩传递给丝杠,把电机的螺旋运动转化为直线运动,从而实现支腿的举升和收藏运动,并且由限位螺钉实现支腿的快速升降功能,由上下行程开关来限制支腿的行程[3],调平结束后,由力传感器判断虚腿。

图1 调平支腿结构原理图
2 平台调平方式
现有调平系统的支撑方式主要有三点式、四点式以及多点式调平,其中多点式是指六点以上的调平方式。
2.1 三点式调平
由几何知识可知不在同一条直线上的三点确定一个平面,或者等效为不平行的两条直线确定一个平面,故可以在相交直线上各安装一个倾角传感器,通过考察平面内两条相交直线是否水平,来判断平台的水平度。三点式平台模型如图2所示。
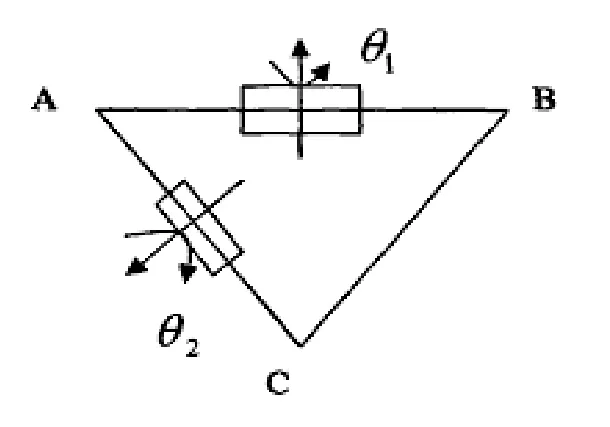
图2 三支腿式系统平台模型
根据两个倾角传感器测得的倾角θ1和θ2可以判断三个支撑点A、B、C的相对高低[4],系统平台调平时,θ1和θ2同时满足要求后,各个支腿停止运动,此时系统平台处于我们所认为的水平状态。由于精度的限制,认为平台已经水平,但是平台距离真正的水平还存在一定的误差,平台的水平误差θ与θ1、θ2的关系为:

θ1和θ2测量范围为 ,为试验平台要求参数,水平误差θ为:

如果 ,同时将系统平台的三条支腿的距离设计成等边三角形,可以得出:

三点式调平控制原理简单,调平速度快,成本较低,但抗倾覆能力差,尤其对于重载式车辆,是必须要避免的。
2.2 四点式调平
对于四点式调平系统的四条支腿布置方式按对称式布置,分别将四条支腿置于四个角的位置,这种四腿支撑的方式保证了平台受力均匀,四条支腿分列两侧也保证了调平系统平台的稳定性,同时也增强了平台的抗颠覆性能力。四点式平台中央安装双轴倾角传感器,如图3所示。

图3 四支腿调平系统平台模型
四点式调平系统平台在调平完成时也会产生一定的误差,取 ,由式(2)得:

由此得知,四点式调平不但解决了抗倾覆能力差的问题,同时提高了调平的精度,但是四点调平结束后,容易出现虚腿现象,从而影响系统的稳定性。为了解决虚腿问题,在每个支腿上都装有压力传感器,通过比较调平后各支腿的压力值与静态下各支腿压力值,差值如果超出一定的误差,则是虚腿并需要对其进行充实。
2.3 多点式调平
多点式调平的原理相近,考虑到在调平系统工作中平台会发生形变,为了解决这个问题,通过增加支腿数量来减少平台发生形变。这显然达到了目的,但在多支腿调平系统的调平过程中,由于支腿的增加使得调平算法复杂,控制系统也变得复杂,与此同时调平系统相对应的调平时间也会相应增加,各个支腿的受力不均匀,虚腿问题更加突出。
综合考虑各种调平方式的调平时间、精度、成本、抗倾覆性等因素,采用四点调平方式。
3 电控系统硬件构成
四腿机电调平电控系统硬件结构如图4所示。

图4 硬件结构图
倾角传感器:选用高精度数字双轴倾角传感器,能输出X、Y两个垂直方向上的角度,分辨率为0.002o,可选RS232接口,波特率可调,工作方式为应答模式和自动模式。
压力传感器:测量支腿所承受的压力,采用RS232接口,工作于应答模式。
位置传感器:选用性能较稳定的接近开关,用于限制丝杠的行程。
单片机:选用ATMEL公司生产的AT89C52单片机,接收操作人员的控制按键输入,把接收到的倾角传感器和压力传感器的数值进行转换,并把结果显示在数码管上,并且选择匹配的调平方式,驱动电机按合适的方向运动和的距离,实时监控,实现调平。
报警电路:当系统出现故障,如压力过大、丝杠超出行程,会通过蜂鸣器或点亮发光二极管通知操作人员。
4 调平方法研究
调平系统的调平方法主要包括角度误差调平法和位置误差调平法。角度误差调平法通过直接检测平台的X轴和Y轴的倾角值,通过伸长或缩短支腿,使倾角值减小到要求的误差范围之内。位置误差调平法首先通过计算确定每条支腿要伸长或缩短的距离,然后驱动相应支腿动作,直到四个支腿平齐,使平台达到水平。由于平台的载重一般比较大,当支腿需要缩短时,平台下降会产生较大惯性[5],容易发生抖动和倾覆,所以一般采用“逐高式”,即只升不降的方法实现调平。系统的调平过程如图5所示。
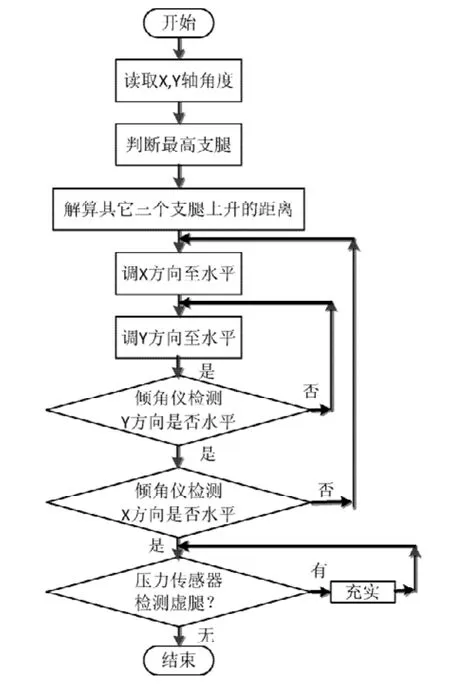
图5 调平过程流程图
平台初始状态如图6所示,系统上电接收到调平开始命令之后,首先通过倾角传感器读取X轴和Y轴的角度 和 ,然后确定平台的四个支撑点的最高点。最高点的判断方法如下(设定角度精度为):
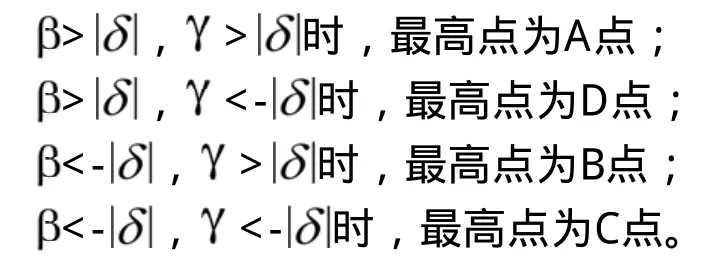
调平过程中,保持最高点不动,解算出三条较低支腿的行程(假设最高点为C,AD之间的距离为a,AB之间的距离为b),由于平台为刚性平台,为了消除单点升高时,带来的虚腿问题,采用双腿同时升高,同时还简化了算法,计算如下:
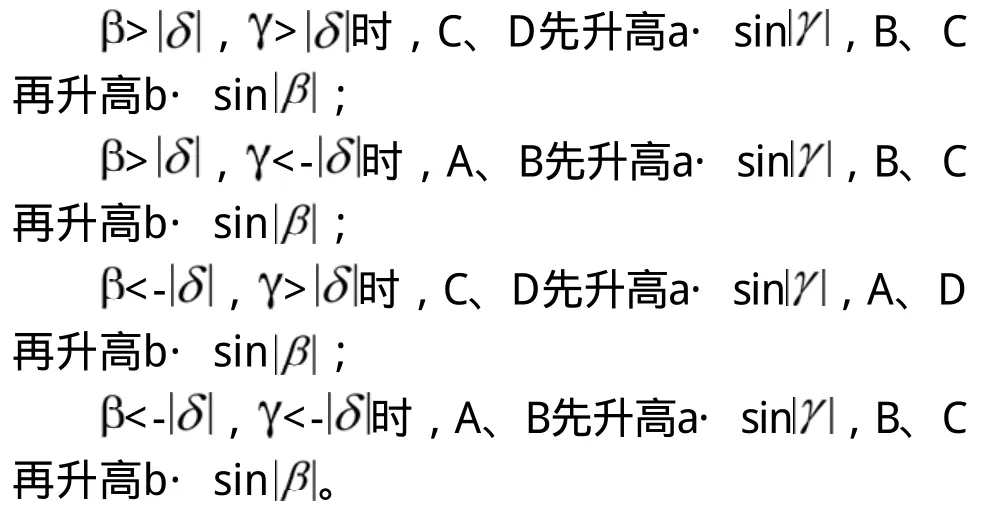
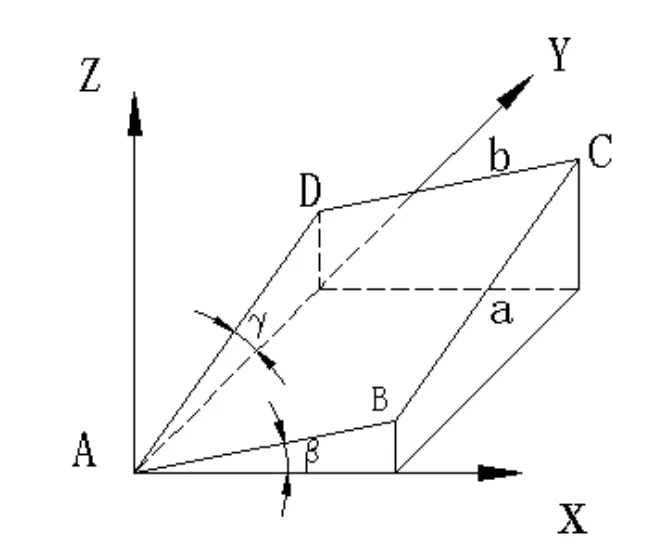
图6 倾斜平台示意图
解算出各支腿的行程之后,如果同时调整X方向和Y方向水平,会使算法复杂,既增加了工作量,又延长了调平时间,所以先调整X方向水平,然后调整Y方向水平,在调整Y方向水平时,可能会影响X方向的水平,则当这两个方向都调整水平后再进行判断,如果水平度不满足精度要求,再分别进行调平,如此循环,直到达到所要求的精度范围之内。在分别进行调平的过程中,为了增加调平精度和缩短调平时间,在调平过程中,采用粗调平和精调平相结合的方法。粗调平是指采用位置误差调平法,在解算出各支腿行程之后,采用较快的速度先上升到理想距离的95%,以此来缩短调平时间。精调平是指采用角度误差调平法,在粗调平结束后,直接通过检测倾角的角度值来判断平台的水平度,虽然调平时间长,但可以保证调平精度。
由于各种因素的影响,在X方向和Y方向都调平之后,可能会有虚腿产生,影响系统的稳定性。通过判断压力传感器的压力值,便可判断出虚腿,并进行充实。虚腿充实后仍然要检测平台的水平,满足精度要求时,调平结束,锁定支腿。
5 结论
基于单片机的四支腿机电自动调平试验系统,具有控制原理简单、稳定性高、便于维护、性价比较高等优点。经测验该系统能有效地避免虚腿产生,发生倾覆现象,具有很强的通用性,该试验系统为进一步开发实际应用系统提供了硬件基础。四腿机电调平系统可以应用于汽车、雷达、卫星天线及其他需要调平的装置。
[1]李迪科,李萍,等.某雷达自动电调平控制系统的设计[J].重庆大学学报,2004,27(6):93-95.
[2]李忠于.某雷达自动调平机构的设计分析[J].火控雷达技术,2002,31:43-46.
[3]娄华威,卜德岭,等.电液比例阀控液压调平系统设计与仿真研究[J].流体传动与控制, 2009,(5): 10-11.
[4]欧同庚,王琪,等.水平面基准系统的自动调平方法研究[J].大地测量与地球动力学,2008, 28(5):129-131.
[5]凌轩,朱玉泉,等.雷达天线车自动调平系统设计[J].液压与气动,2008,(4):1-3.
