多普勒效应测速新探
2015-07-02张梦琪
张梦琪,杨 名
(安徽大学,安徽合肥 230601)
多普勒效应测速新探
张梦琪,杨 名
(安徽大学,安徽合肥 230601)
从大学物理教材出发,以多普勒测速为例,论述了在多普勒效应中测速仪与被测物体相对位置的不同对结果的影响。
多普勒效应;多普勒测速;汽车测速
目前,已经有很多关于多普勒效应测速的研究,其应用与发展也相当广泛。波源的改进方面从声波测速发展到利用光波的多普勒效应测速,再到利用激光多普勒效应测速甚至两维激光测速,亦或是关于减小测速误差的研究等都已有很多报道。例如,张少平等[1]讨论了适用于小型潜器的二维多普勒测速仪的主要系统参数设计和精度补偿方法。孙渝生[2]研究了将激光应用于多普勒效应,从而利用激光测量流体速度、固体运动速度等。之后,孙渝生等[3]又研制了两维激光多普勒测速仪,利用偏振光测量两维速度场,采用旋转光栅分束产生频移来辨别流向,使测量最佳化。唐春晓等[4]以双光束激光多普勒测速为基础,介绍了同时多点激光多普勒测速仪(LDV)的系统构成和原理和计算公式。以上工作都是针对多普勒测速装置的基本原理进行讨论,而在实际的多普勒测速过程中会有多方面的因素影响测量的准确性,包括原理性的误差和仪器误差。吴卫玲等[5]从仪器的角度分析了多普勒雷达测速的误差来源和大小,并得出了测速精度。但是对于多普勒测速过程的原理性误差的分析鲜见报道,不辞本文拟针对多普勒效应测速的原理性误差进行分析,主要考虑最基本的多普勒效应测速过程中波源与观察者相对位置的变化对测量结果的影响。在普通物理教材[6]中给出了多普勒效应的一般公式,但教材中只简单讨论了波源和观察者在同一直线上的情况,应用于实际时会有很多不便之处,比如测量车速时并不可能把测速仪、摄像头等仪器放在道路中央,使其在汽车的行进方向上,另外,教材只对多普勒测速进行了理论的分析,而未给出具体的推导或者计算,故而本文基于文献[6]和文献[7]进行以下实际运用中的讨论,以弥补其他研究中原理性误差的分析和普通物理教材中应用性的不足。
1 多普勒效应
波源和观察者相对介质静止时,观察者接收到的频率和波源发出的频率是相同的。如果波源或观察者或两者都相对于介质运动,那么观察者接收到的频率与波源发出的频率就不相同了,这种现象叫做多普勒效应。
1.1 波源不动,观察者相对介质以速度运动(见图1)
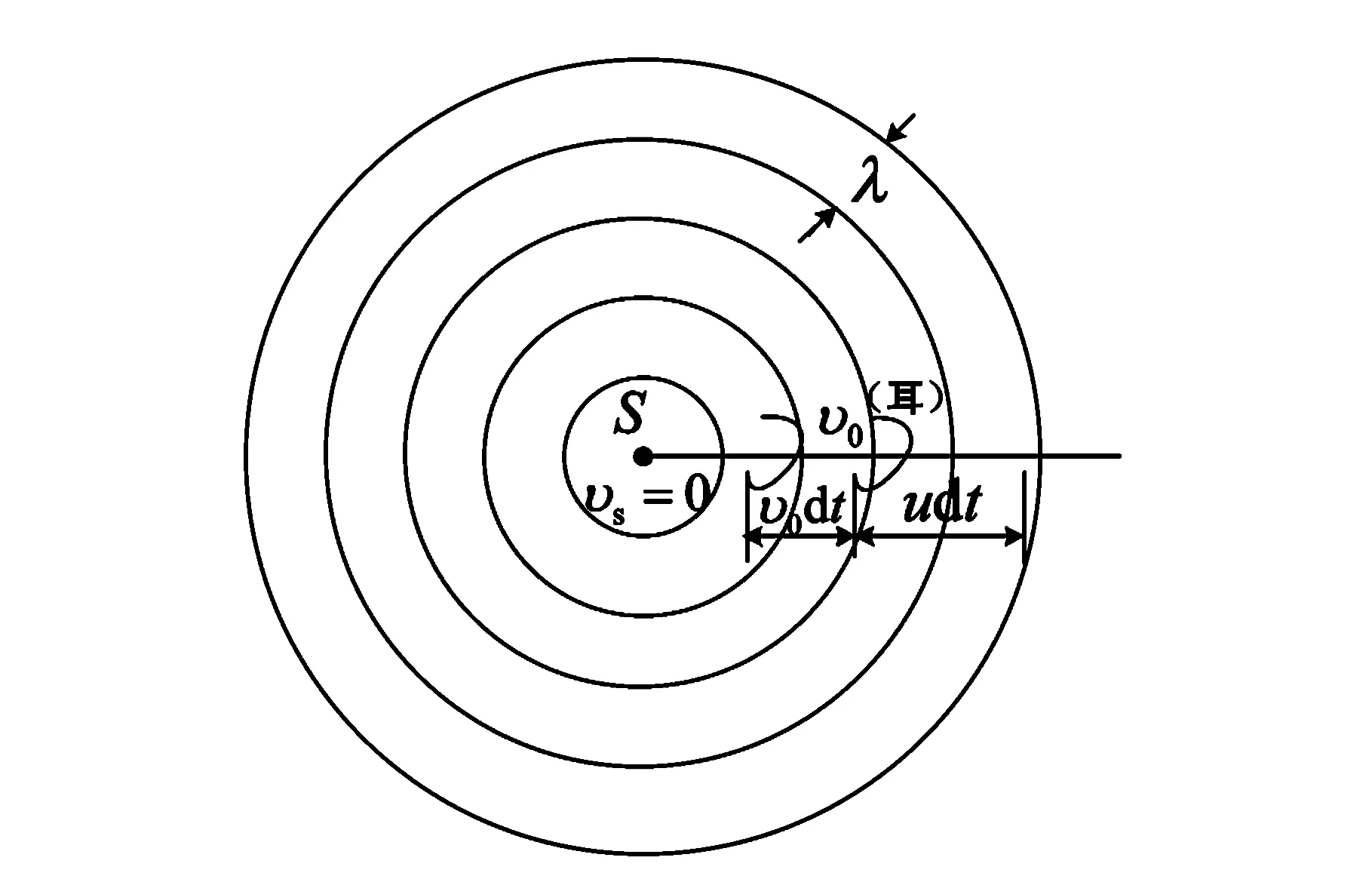
图1 观察者运动时的多普勒效应
波源产生的波以速度向传播者(图中“耳”)传播,时间内传播距离为u d t,观察者接收到的完整波数即为分布在距离中u d t的波数。现在观察者以υ0迎着波的传播方向运动,d t时间内移动的距离为υ0d t,因而分布在距离υ0d t中的波也应该被观察者接收到。总的来说,观察者可以接收到在(υ0+u)d t距离内的波,所以观察者接收到的频率(完整波数)为:


同上述分析,当观察者远离波源运动时,观察者接收到的频率为:

1.2 观察者不动,波源相对介质以速度运动(如图2a)
当波源S1运动时,介质中的波长发生变化,如图2a所示,沿波源运动的方向,波长变短了;背离波源运动的方向,波长变长了。
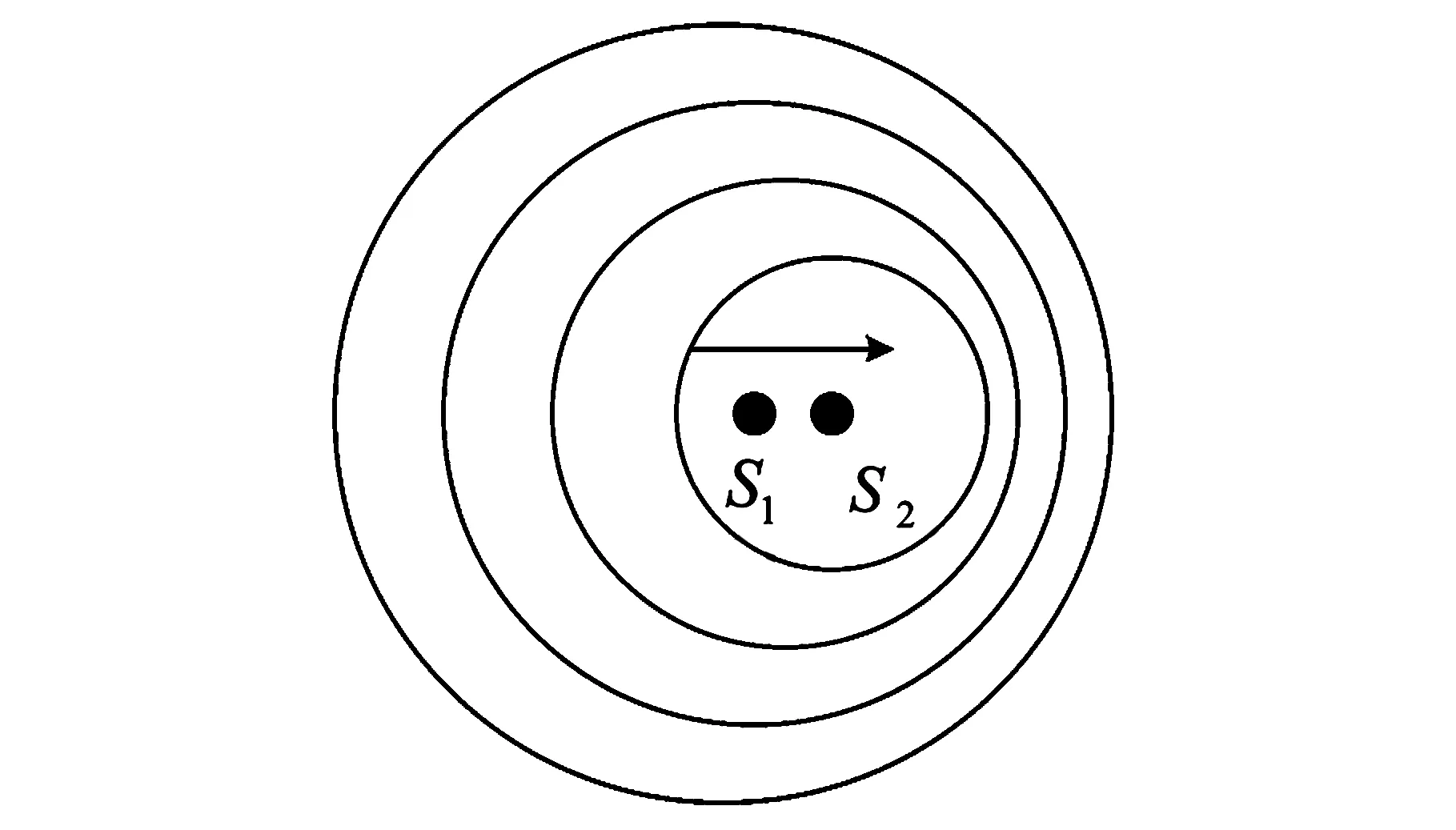
图2 a 波源运动时的多普勒效应
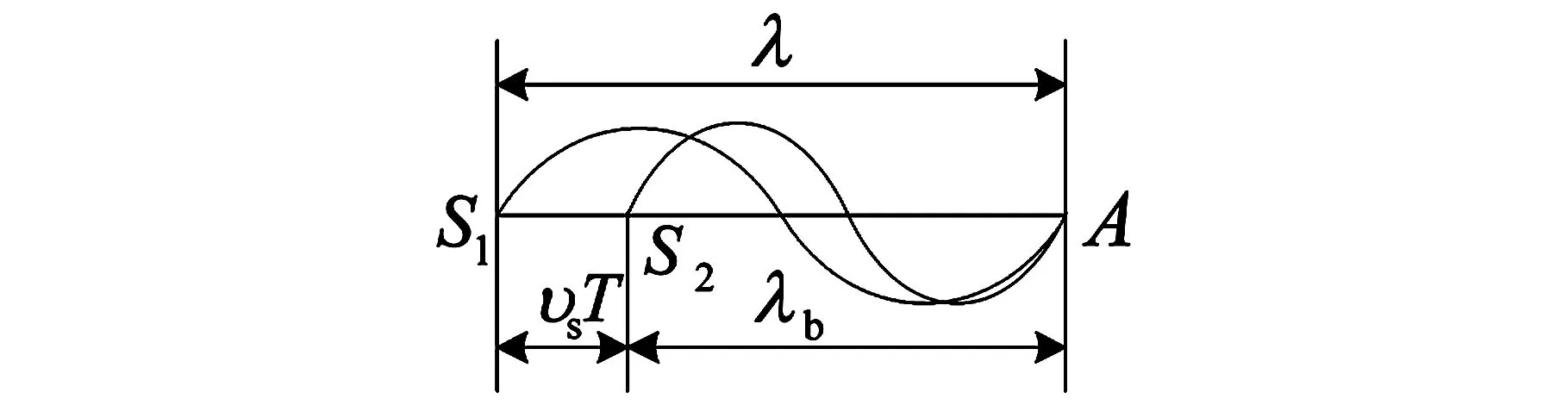
图2 b 波源运动的前方波长变短
假设波源S1以速度υs向着观察者运动,当波源从S1发出的某一振动状态经过一个周期T的时间传到位置A时波源已经运动到了S2(S1S2=υsT),此时发出与之前振动运动状态相位差为2π的下一个运动状态,S2与A之间的距离即为此时介质中的波长λb,设波源静止时的波长为λ =uT,则由图2b可得出:

即可求得现在波的频率为:

因为观察者是静止的,所以观察者接收到的频率即为现在波的频率:

同上述分析,当波源远离观察者运动时,观察者接收到的频率为:

2 汽车测速
2.1 多普勒测速的原理
仪器发射一定频率的超声波,由于多普勒效应的存在,当被测物体移动时反射回来波的频率发生变化,只要将回收的频率与原始数据进行比较和计算后,就可以推断出被测物体的运动速度。
应用到实际中,测速仪一般固定不动,故考虑汽车在向测速仪运动,并且在极短的时间内是均速行驶的。下面来讨论测速仪和汽车相对位置不同时的不同情况。
2.2 测速仪在汽车行进方向上
我们假设汽车A向着测速仪O以速度υ0移动,测速仪发出频率为v的超声波。
此时的情况是:测速仪O是波源,汽车A是接收者;波源静止,接收者向波源以速度υ0运动,如图3a。
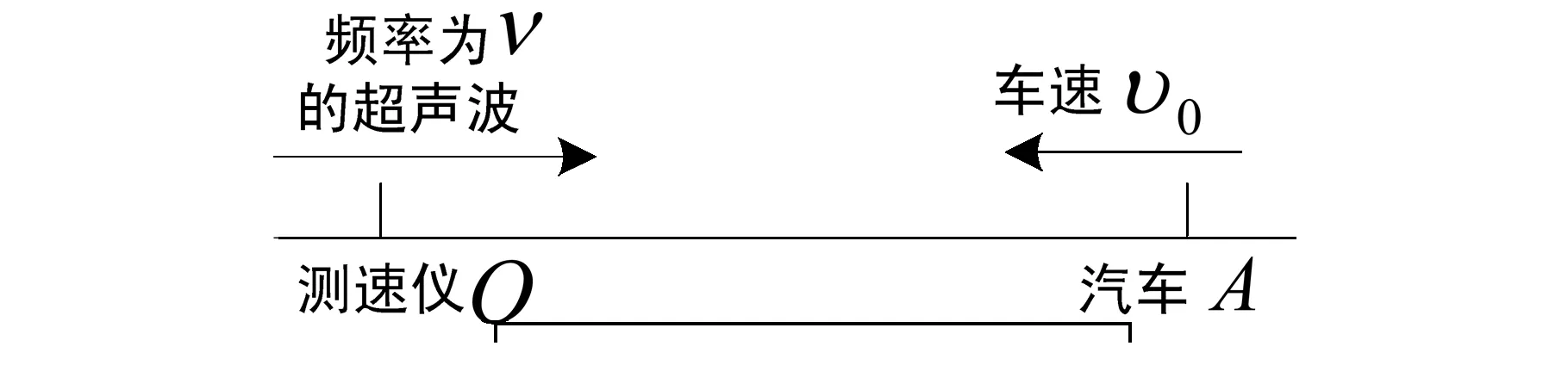
图3 a 测速仪在汽车行进方向上发射超声波
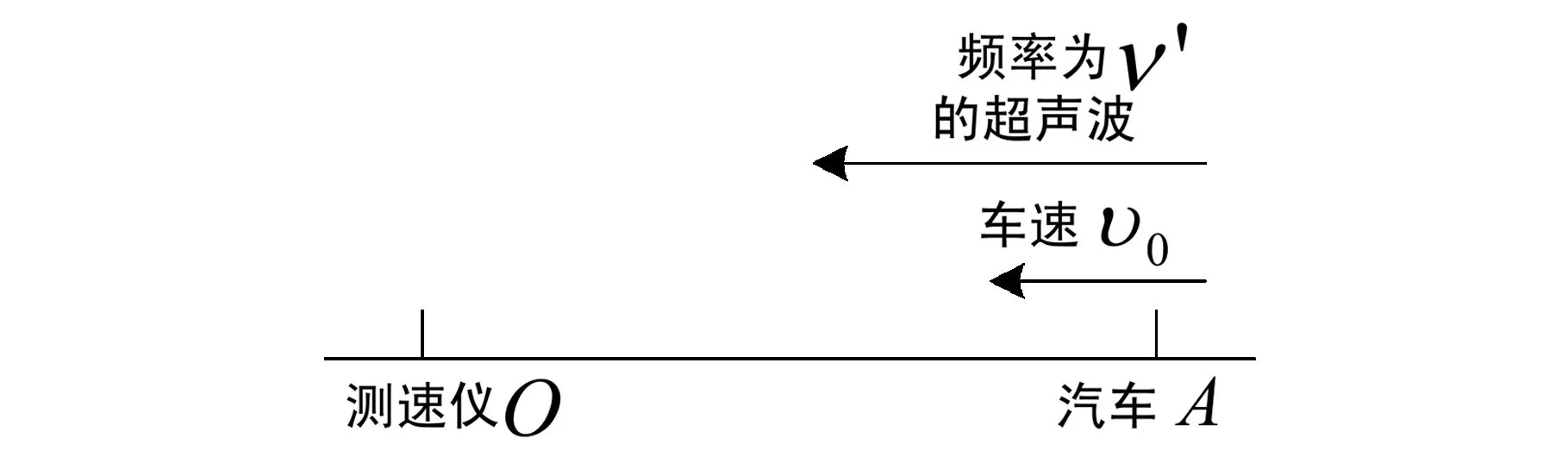
图3 b 测速仪在汽车行进方向上接收超声波
可以参照1.1,利用公式②,故汽车接收到的频率为:

反射之后,汽车变为波源,测速仪变为观察者,情况变为波源向观察者以速度υ0运动,波源频率由变为v′,观察者静止,如图3b。
可以参照1.2,利用公式⑥,则测速仪接收到的频率为:

联立②、⑧可计算出汽车的速度:

其中,测速仪发射波的频率v,波速u,测速仪最后接收到的频率v″均可由仪器测出,带入数据即可求出车速υ0,但是这种情况是不实际的。
2.3 测速仪在汽车的前进方向上但高度不同
这种情况的讨论是基于现在交通上最常见的测速仪和摄像头位置放置,即从马路一侧的支柱延伸出一根横向支柱于马路中央上方,安置测速仪和摄像头,如图4a所示。
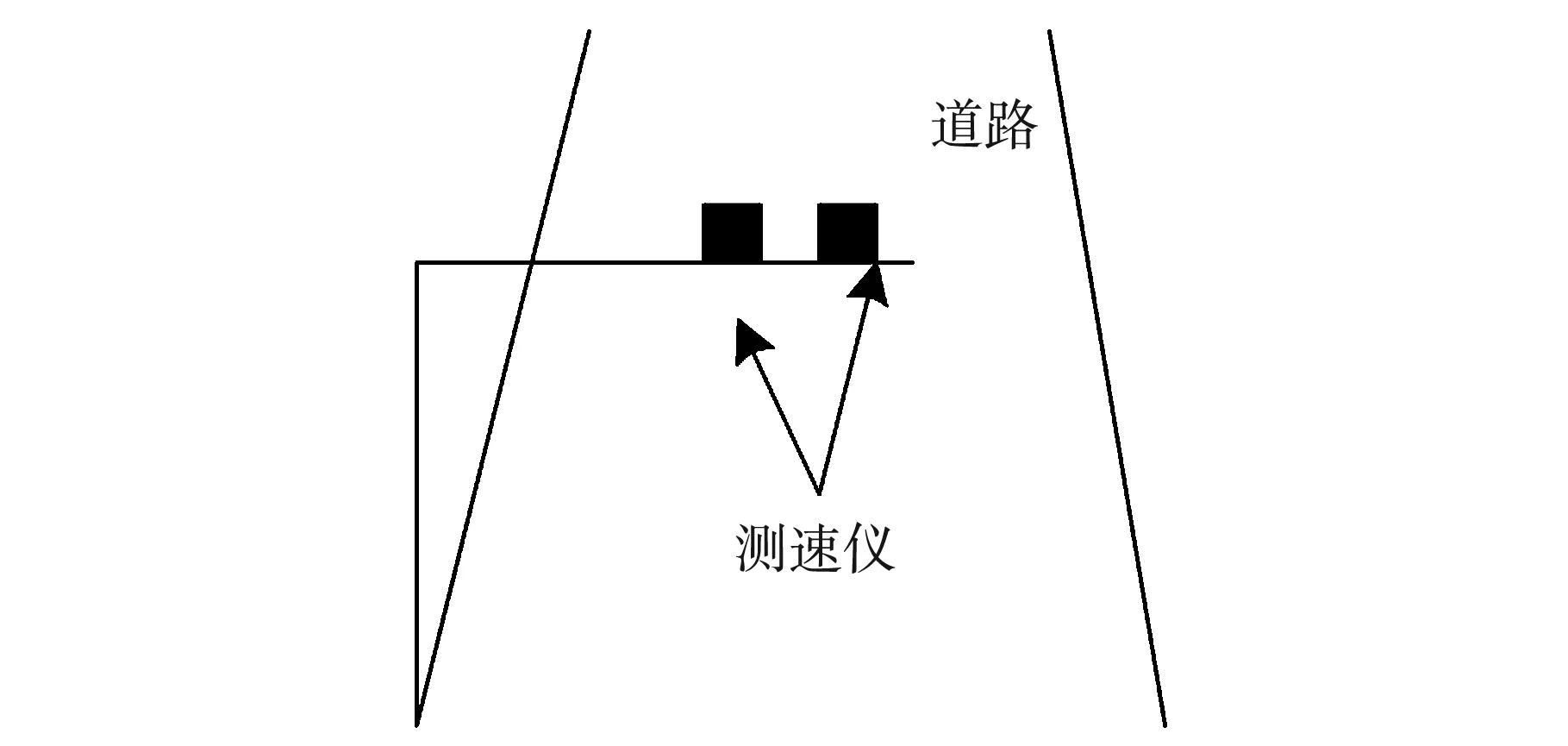
图4 a 测速仪在汽车前进方向上空

图4 b 测速仪在汽车前进方向的上空发射超声波
设汽车速度为υ0,波源O发射频率为v的波,如图4b所示。

当汽车在A处时,测速仪O是波源,汽车是接收者;波源静止,接收者向波源以速度υ0cosα运动,可参照1.1,利用公式②,求得汽车接收到的频率为:

反射之后,汽车是波源,测速仪是接收者,波源向接收者以速度υ0cosα运动,可以参照1.2,利用公式⑥,求得测速仪接收到的频率为:

同理,经过较短的时间d t(我们假设汽车在这段极短的时间d t内以υ0匀速运动)汽车运动到B处,测速仪O是波源,汽车是接收者;波源静止,接收者向波源以速度υ0cosβ运动,可参照1. 1,利用公式②,求得汽车接收到的频率为:

反射之后,汽车是波源,测速仪是接收者,波源向接收者以υ0cosβ速度运动,可以参照1.2,利用公式⑥,求得测速仪接收到的频率为:
因为汽车从A到B的运动可视为匀速运动,故有下式:

联立⑫、⑬、⑰可得:
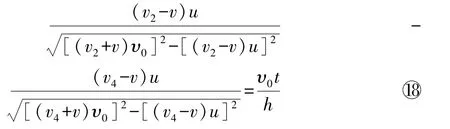
⑱式中v、u已知,v2、v4、t、h可通过仪器测得,带入数据通过计算软件即可得出车速υ0。
2.4 测速仪不在汽车的前进方向上
测速仪不在汽车的前进方向上且高度相同的情况与2.3中讨论类似,下面我们讨论测速仪不在汽车的前进方向上且高度不同的情况。此情况的讨论是基于测速仪和摄像头安置在马路一侧的支柱上的情况,如图5a所示。
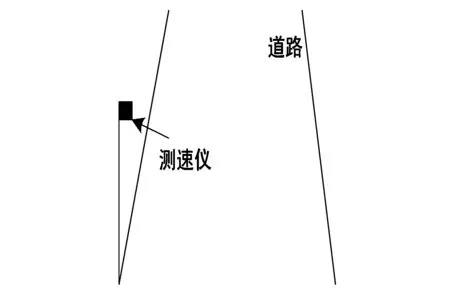
图5 a 测速仪在道路一侧上方
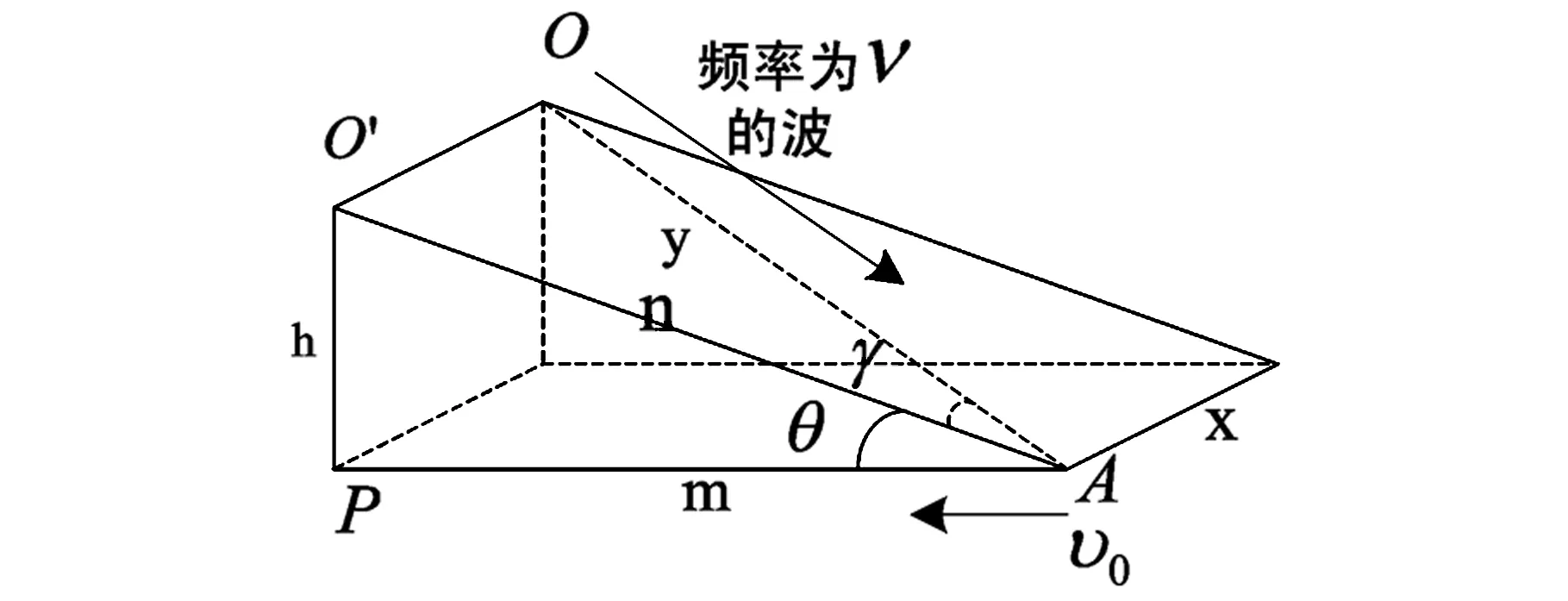
图5 b 测速仪在道路一侧上方发射超声波
如图5b,只需将汽车速度分解两次,表示出汽车沿汽车A与测速仪O连线AO方向上的速度:

再带入2.3中公式⑩~⑱即可。
4 结 论
在实际应用中,测速仪可能在汽车的行进方向上,但此时测速仪不可能与汽车在同一高度,即测速仪放置在道路的中央上空,或者测速仪不在汽车行进方向上,此时它与汽车在同一高度或者不同高度均可,即测速仪放置于道路侧边或侧边上空,在这些情况下,交警均可利用多普勒效应方便的检测车辆是否超速行驶并拍照取证。
[1] 张少平,唐楚华,第七○七研究所九江分部,等.多普勒测速声呐在小型潜器中应用的分析[J].声学与电子工程,2006(1):35-38.
[2] 孙渝生.激光多普勒测速及其应用[J].物理,1987 (5).
[3] 孙渝生,唐开元,张自栋,等.两维激光多普勒测速仪[J].计量学报,1985(2).
[4] 唐春晓,李恩邦,李志平,等.同时多点激光多普勒测速系统[J].光电子·激光,2007,18(7): 824-827.
[5] 吴卫玲,宋喜报.海军航空工程学院青岛分院火控教研室.多普勒测速雷达测速误差分析[J].计量与测试技术,2000:31-32.
[6] 马文蔚等.物理学下册[D].5版.高等教育出版社:马文蔚,2006:70-75.
[7] 刘林.用多普勒测速仪监测车速[J].物理教师, 2012(11):57-57.
[8] 周珺,陈宗广,郭鹏.不同频率的声波对测速的影响[J].大学物理实验,2014,2(10):35-36.
Revisiting the Doppler-effects Based Velocity M easurement
ZHANG Meng-qi,YANG Ming
(Anhui University,Anhui Hefei230601)
Starting from the Doppler effects,this paper discussed basic principles of the Doppler-effect based velocity measurement and the special attention is paid to the effect of the relative position between the detector and the object on themeasurement results.
Doppler effects;Doppler-effects based velocity measurement;vehicle velocity measurement
O 4-34
A
10.14139/j.cnki.cn22-1228.2015.005.024
1007-2934(2015)05-0082-04
2015-06-02
国家自然科学基金项目(11274010);安徽省高等学校省级质量工程项目(2014tszy004);安徽大学本科教育质量提升计划项目(xjtszy1401);安徽大学大学生科研训练计划项目(kyxl2013083)