基于PID控制技术的供水网控制系统设计
2015-06-07张亚明高晓丁
张亚明,高晓丁
(西安工程大学机电工程学院,陕西西安 710048)
基于PID控制技术的供水网控制系统设计
张亚明,高晓丁
(西安工程大学机电工程学院,陕西西安 710048)
针对传统的城市深井供水网控制系统采用现场人员值守所造成的费用高,效率低,不便于管理,设计基于PID控制技术的城市深井供水网水位控制系统.系统首先采用PID控制技术,通过压力传感器获取水位变化信息,然后反馈到PID的控制器形成闭环控制,通过对变频器控制实现深井水泵电机的变频调速,从而实现了对供水网水位的自动控制.MATLAB仿真实验结果表明,系统对深井供水网水位PID控制响应速度快,运行稳定,控制精度高.
PID控制;变频调速;水位控制;MATLAB
0 引 言
城市供水网控制系统作为一个城市的生活基础设施,其供水质量关系到城市的健康发展.国内供水网控制系统的应用始于80年代初期,虽然经过30多年的研究与开发,系统性能和可靠性有了较大提高,特别是计算机技术应用方面有了长足的进步,但当前的城市供水网控制系统在实际推广应用中还存在一些问题,比如实用性不强,功能单一,系统某些技术不够标准化和规范化,实时控制不准确等[1].
针对国内大多数城市供水网水位控制系统的供水方式普遍不同程度地存在浪费水力、电力资源,效率低,可靠性差,自动化程度不高等缺点,提出了采用PID控制技术结合变频器控制的方法来实现对城市供水系统的供水控制工作[2-3].为了给城市供水网控制系统后续的实际应用提供理论依据,建立了供水系统的供水数学模型,模型由一阶系统模型加时滞环节来近似描述.并结合实际工作环境,利用MATLAB/SIMULINK对所建立的模型进行了实例化仿真研究.系统利用了变频调速的低能耗,并把PID控制的简便性与鲁棒性融为一体,易于实现,便于工程应用.
1 总体设计方案
系统总体方案如下,蓄水池水位通过重力作用产生压力,并使得安装在高位水池底部的压力传感器感知产生电压信号,通过基于嵌入式技术的下位机和无线数传电台将该电压信号传送到上位机(PC机)的PID控制系统.上位机经过对采集的信号经行分析,并经过简单的线性计算后,得到实际的水位信息,根据PID控制运算后,发出控制水泵电机转速的命令数据,数据通过无线数传电台传输给基于嵌入式技术的下位机,下位机输出4~20mA的电流信号,输入到变频器模拟量控制端,控制变频器输出的频率,变频器控制水泵电机的转速,使水泵给蓄水池的供水量达到居民用水的要求.水泵电机的电压、电流以及水泵的出水口水压信息通过相应的电压、电流、压力传感器采集得到模拟量并输入到下位机,经过AD转换后实时上传到上位机,实现对水泵系统工作状态的实时监测.系统框图如下图1所示.

图1 城市深井供水网水位控制系统总体框图Fig.1 Municipal deep well water level control system block diagram
2 PID控制器方案设计
本系统中PID控制输入量为蓄水池水位实际值N(t)和指定期望水位值u0(t),输出量为控制水泵电机供电电压的频率调节信号U(t).在该系统中通过对期望水位和蓄水池实际水位对比产生的偏差信号E(t)进行比例、积分、微分运算,从而产生控制水泵电机供电电压的频率调节信号U(t),调节水泵电机的运行速度,进而调整水泵的出口流量[4].从而实现对高位蓄水池水位的控制.系统的PID控制器结构如图2所示.
2.1 PID控制算法设计
PID控制器是一种基于“过去”,“现在”和“未来”信息估计的简单算法.常规PID控制式为

式中,Kp,Ti,Td分别为比例系数、积分时间常数和微分时间常数.
在计算机控制中,必须进行离散采样处理,把模拟量变为数字量,所以本设计采用增量式PID算法,用求和的形式替代式(1)中积分可得

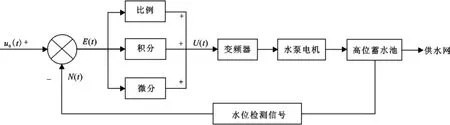
图2 PID控制器结构图Fig.2 PID controller structure
用增量的形式替代式(1)中微分可得
式(1)经过变换后得


由第k次采样的输出值Uk和第(k-1)次的采样输出值Uk-1相减得

式中,T为采样周期,K为采样序号.
由式(5)可知根据本次采样的偏差Ek、前两次采样的偏差值Ek-1和Ek-2,以及上一次的输出值Uk-1就可以得到本次的输出值
2.2 供水对象数学模型
蓄水池水泵供水对象模型如图3所示.用一阶系统模型加时滞环节来近似描述时,常可用两点法直接求取对象参数.水流入量Qi由水泵流量加以控制,流出量则由用户根据需要来改变.被调量为水位h,它反映水的流入与流出之间的平衡关系.
依据深水泵设计时的排量q,泵每转一圈所排出的流量是固定的,所以单位时间的流量Q为
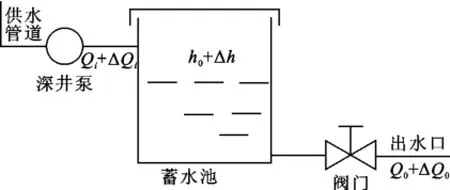
图3 蓄水池水泵供水系统模型Fig.3 Supply system model of reservoirwater pump water

交流异步电机的频率与转速的对应关系为

式中,n是电机转速,r/min;f是电源频率;p是电机磁极对数.由式(6)和式(7)得到水泵电机频率和流量的关系为

一般水泵选定以后,驱动电机磁极对数p,水泵排量q都是固定值,由(8)式可得水泵的单位流量与电机运行频率之间的对应关系[6].
令Qi表示输入水流量的稳态值,ΔQi表示输入水流量的增加,Qo表示输出水流量的稳态值,ΔQo表示输出水流量的增量,h表示液位高度,h0表示液位的稳态值,Δh表示液位的增量.设A为高位水池横截面积,R为流出端负载阀门的阻力即液阻.根据物料平衡关系,在正常工作状态下,初始时刻处于平衡状态:Qi=Qo,h=h0当水泵流量发生变化时,液位随之发生变化.在流出端负载阀开度不变的情况下,液位的变化将使流出量改变[7].
流入量与流出量之差为

式中,V为液槽液体贮存量,ΔQi由水泵流量变化Δq引起,当水泵前后压差不变时,可得
式中,Kq是水泵流量系数.

流出量与液位高度的关系为,这是一个非线性关系式,可在平衡点(ho,Qo)附近进行线性化,得液阻表达式为
将式(10)和(11)代入式(9),可得


式中,T=RA,K=KqR.在零初始条件下,对式(12)两端进行拉氏变换,得到单台水泵供水的传递函数为

由于时间常数T反映系统的惯性[8],所以一阶系统的惯性越小,其响应过程越快;反之响应越慢.
2.3 机组循环控制方案设计
考虑到城市供水网高位蓄水池会有N组机组和响应新时代的节能环保,且为了使各个机组有相同的寿命,避免对同一台机组频繁的控制,设计轮流选择变频器去控制机组.在供水高峰期,全部机组高速运行;在用水低谷,就要有选择地去控制机台机组工作,设计控制调节的条件,实现对整个系统的循环控制.这里假定有9组机组:
(1)当水位h≥hmax时,机组全部暂停运行;
制另外的一组机组);(3)当水位时,循环控制6台机组(即在下次水位到达改区间时,变频器轮换选择控制另外的两组机组);
(4)当水位h≤hmin时,机组全部运行.
3 建模与仿真
设被控对象的传递函数是

建立SIMULINK模型[9]如图4所示.图中,“I”为积分器,“D”为微分器,“Kp”为比例系数,“Ti”为积分时间常数,“Td”为微分时间常数.
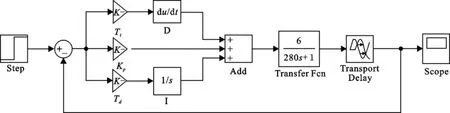
图4 SIMULINK仿真模型图Fig.4SIMULINK model diagram
根据Ziegler-Nichols经验公式[10],可知PID控制整定时,比例放大系数Kp=0.3,积分时间常数Ti=118.8,微分时间常数Td=27,将“Kp”的值置为0.3,“1/Ti”的值置为1/118.8,“Td”的值置为27.
为了测试该PID控制器控制效果,通过外加扰动信号来验证,如图5所示,在t=3 000ms时,外加一个幅值为1的扰动信号[11].
选定仿真时间,点击仿真运行按钮,等待运行完毕后,双击“Scope”得到结果,如图6所示.
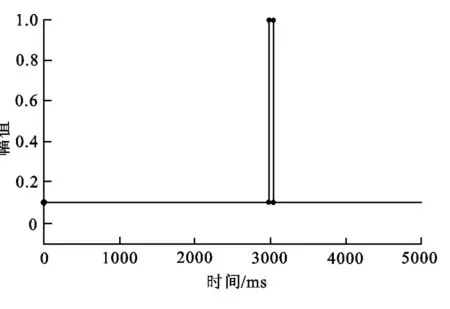
图5 扰动信号图Fig.5 Disturbance signal
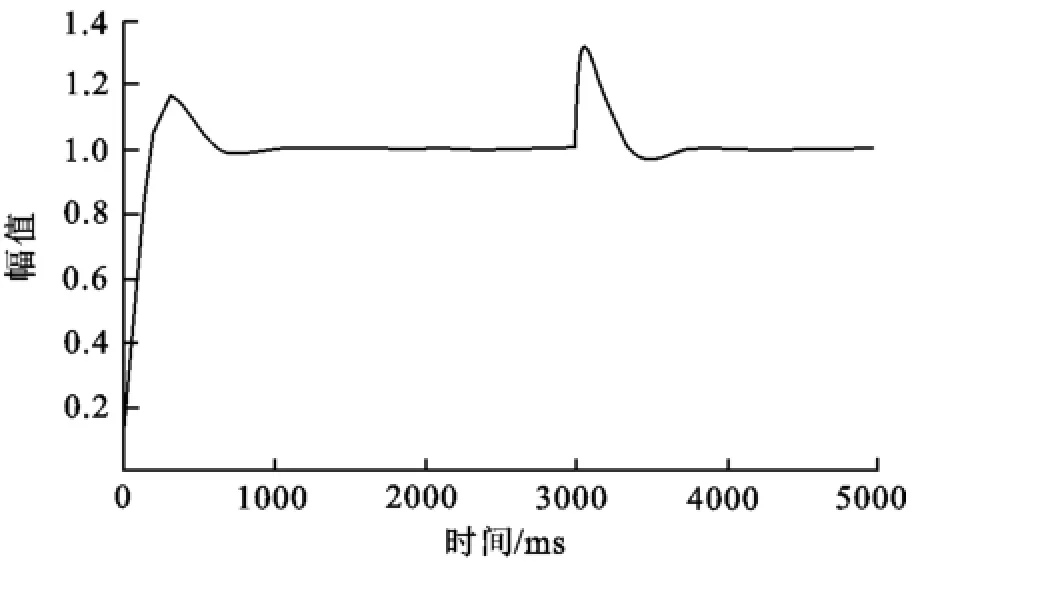
图6 仿真结果图Fig.6 Simulation results
由图6可以看出,该PID控制器效果良好,在1 000ms时系统已趋于稳定状态;当系统稳定后,若加一个幅值为1扰动信号,PID控制器很快对被控对象的响应进行校正,在不到1 000ms时间内使其稳定.利用MATLAB/SIMULINK可以实现PID控制器的离线设计和整定,并可实现实验室仿真.
4 结束语
基于PID控制技术的城市深井供水网水位控制系统建立在数学模型上,运用成熟的PID控制技术,在MATLAB/SIMULINK环境下对PID控制器进行了设计和仿真.仿真结果表明,基于PID控制技术的城市深井供水网水位控制效果良好,提高了系统的动静态性能,为实现供水网实现自动化控制打下了理论基础.系统把PID控制的简便性与鲁棒性融为一体,易于实现,便于工程应用,具有较强的实际意义.
[1] 石啸.城市自来水厂自控系统的设计与实现[D].上海:华东理工大学,2013:1-8.
SHI Xiao.Design and application of automatic system for water treatment[D].Shanghai:East China University of Science and Technology,2013:1-8.
[2] 杨继盛.城市供水远程监控系统的研究与应用[D].合肥:合肥工业大学,2011:14-16.
YANG Ji-Sheng.Research and application of remote monitoring system of urban water supply[D].Hefei:Hefei University of Technology,2011:14-16.
[3] 尹超.变频恒压供水系统的智能控制策略[D].长沙:长沙理工大学,2013:32-39.
YIN Chao.Intelligent control strategy based on constant pressure water supply system with frequency conversion[D].Changsha:Changsha University of Science&Technology,2013:32-39.
[4] 朱涛,周天沛.基于PLC的双容水箱液位控制仿真与实物实验系统设计[J].实验技术与管理,2013,33(11):29-33.
ZHU Tao,ZHOU Tianpei.Design of double-capacity water tank level control simulation and reality experiment system based on PLC[J].Experimental Technology and Management,2013,33(11):29-33.
[5] 陶永华.新型PID控制及其应用[M].成都:机械工业出版社,2006:44-76.
TAO Yonghua.New type of PID control and its application[M].Chengdu:China MachinePress,2006:44-76.
[6] 王志新,谷云东,李洪兴.单水箱液位控制系统的模糊推理建模及仿真[J].模糊系统与数学,2007,21(2):141-147.
WANG Zhixin,GU Yundong,LI Hongxing.Fuzzy modeling and simulation of several level control experiments on single tank system[J].Fuzzy Systems and Mathematics,2007,21(2):141-147.
[7] 洪世杰.基于神经网络PID控制算法的起爆具生产线温度控制设计与开发[D].杭州:杭州电子科技大学,2014:28-32.
HONG Shijie.The booster production line temperature control design and development based on Neural Network PID[D].Hangzhou:Hangzhou Dianzi University,2014:28-32.
[8] 刘均益,何清华,王石林,等.基于PID控制算法的自动调平系统的仿真研究[J].中国工程机械学报,2011,9(4):452-456.
LIU Junyi,HE Qinghua,WANG Shilin,et al.Simulation on automatic leveling system using PID control algorithm[J].Chinese Journal of Construction Machiner,2011,9(4):452-456.
[9] 薛定宇.反馈控制系统设计与分析——MATLAB语言应用[M].北京:清华大学出版社,2000:149-161.
XUE Dingyu.Feedback control systems design and analysis,application of MATLAB language[M].BeiJing:Tsinghua University Press,2000:149-161.
[10] 黄小洁.基于MATLAB的数学实验系统的实现及应用[D].南昌:南昌大学,2012:7-12.
HUANG Xiaojie.Realization and application of mathematical experimental system based on MATLAB[D].Nanchang:Nanchang University,2012:7-12.
[11] 张凤莉,李泰.自适应模糊PID控制系统及其MATLAB仿真[J].漯河职业技术学院学报,2011,10(5):34-35.
ZHANG Fengli,LI Tai.Adaptive Fuzzy PID control system and its MATLAB simulation[J].Journal of Luohe Vocational and Technical College,2011,10(5):34-35.
编辑、校对:赵 放
Design of water supply network control system based on PID control technology
ZHANG Yaming,GAO Xiaoding
(School of Mechanical and Electrical Engineering,Xi′an Polytechnic University,Xi′an 710048,China)
To solve the problem of the traditional control system of municipal deep well water supply network which is high-cost,inefficient,and inconvenient to manage,the water level control system of the network based on Proportional-Integral-Differential(PID)control technology is designed.The water level change information is obtained through pressure sensor and feedback to the PID controller,forming a closed-loop control.Frequency conversion speed control of deep well pump motor was achieved by controlling frequency converter and the automatic control of water supply network is realized.The simulation experiment results by using MATLAB show that the system has quick response,good stability,high control accuracy to PID control of deep well water supply network.
PID control;frequency control of motor speed;water level control;MATLAB
TH 39
A
1674-649X(2015)05-0578-05
10.13338/j.issn.1674-649x.2015.05.011
2015-06-09
高晓丁(1955—),男,湖北省监利县人,西安工程大学教授,研究方向为机电设备的测控技术及动态检测技术.E-mail:gaopengpeng119@163.com
