越野车辆机动性研究
2015-05-16韩愈孟广伟黄朝胜门玉琢
韩愈,孟广伟,黄朝胜,门玉琢
(1.吉林大学机械科学与工程学院长春 130025;2.中国第一汽车股份有限公司技术中心,长春 130011; 3.长春工程学院机电工程学院长春 130012)
越野车辆机动性研究
韩愈1,2,孟广伟1,黄朝胜2,门玉琢3
(1.吉林大学机械科学与工程学院长春 130025;2.中国第一汽车股份有限公司技术中心,长春 130011; 3.长春工程学院机电工程学院长春 130012)
为研究越野车辆行驶在不平路段机动性问题,通过偏频试验识别车辆部分特征参数,测量试验车辆悬架位移,计算行驶路段路面不平度,监测驾驶员座椅Z加速度在不平试验路段时序信号,据人体疲劳特性计算人体吸入功率,并建立“人体-车身-车轮”三自由度振动模型;用傅里叶逆变换生成不平路段的时序信号作为仿真输入,利用Simulink仿真试验车辆驾驶员座椅Z向加速度在不平路段的时序信号;提出人体吸入功率为6 W时对应的车速作为评判越野车在不平路段的机动性能。
车辆机动性;路面不平度;偏频试验;动力学仿真
越野车辆在不平路面上行驶时,振动通过轮胎、悬架及车身传递至驾驶员,振幅随车速增加而增加,最终因振动影响使驾驶员不能正常驾驶。国内外对车辆平顺性进行过大量试验、研究,但较少将平顺性作为军用越野车辆机动性评价指标[1-3]。
本文以人体吸入功率为评价指标,对UNIMOG越野车的机动性能进行测量评价,并进行仿真研究。
1 车辆模型
为一辆越野车(UNIMOG-U4000)安装加速度、位移、车速仪等传感器。通过偏频试验测量识别车辆轮胎、悬架、座椅主要参数。对某汽车试验场不平路段进行路面不平度测量计算。据文献[2],人体吸入功率为6 W时对应车速作为越野车辆不平路段的机动性能评价指标。建立车辆振动模型,利用Matlab软件Simulink模块对车辆在不平路段的人体吸入功率进行仿真计算,流程见图1。
车辆振动简化模型[4]为:前后悬挂系统的垂直振动是独立的;车辆各弹性元件刚度均为位移的线性函数;各减震器阻尼均为相对速度的线性函数。将人体、座椅部分质量简化为刚性质量ms,与座椅弹性、阻尼元件构成单自由度子系统,与车身-车轮构成人体-车身-车轮三自由度振动系统,见图2。

图1 吸入功率计算流程框图Fig.1 Absorbed power calculation flow diagram
忽略人体质量的惯性力msp··对车身质量m2运动影响,车身垂直振动z2为“人体-座椅”子系统输入。“人体-车身-车轮”三自由度振动系统微分方程为

图2 人体-车身-车轮振动模型Fig.2 Human-vehicle body-wheel vibration model

2 路面不平度
车辆垂直振动输入激励为路面凸凹不平。通常将路面相对基准平面高度q、沿道路长度l的变化q(I)称路面不平度函数,见图3。
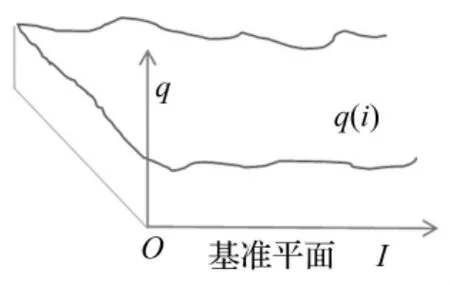
图3 路面不平度模型Fig.3 Road roughness q(I)model
用空间功率谱密度函数描述路面不平度[5-6]为

式中:n为空间频率(单位,m-1),为波长λ的倒数,表示单位长度中所含波长数;n0=0.1/m-1为参考空间频率;Gq(n0)为参考空间频率n0下路面功率谱密度值,称路面不平度系数(单位m3);W为频率指数,为双对数坐标下斜线斜率,决定路面功率谱密度的频率结构。
功率谱密度与空间功率谱密度间转换关系为

式中:u为车辆行驶速度。
3 人体疲劳特性
车辆在不平路段行驶时驾驶员臀部吸入通过轮胎、车身及座椅传递的振动,单位时间内吸入振动的能量称为人体吸入功率。Z向人体吸入功率计算式[7-10]为

式中:Ai为驾驶员座椅加速度均方根有效值(单位,ft/s2);Ci为第i个频谱权系数,即

式中:Wi为角速度,单位rad/s。
各参数值见表1,其中fi为第i频段中心频率。

表1 人体吸入功率计算系数Tab.1 Absorbed power calculation coefficients
人体吸入功率计算权系数Ci随频率变化曲线见图4,人体吸入功率计算程序流程见图5。
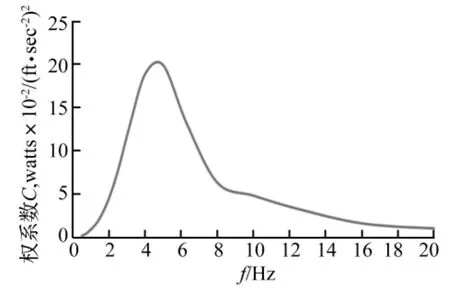
图4 权系数Ci随频率变化曲线Fig.4 Frequency-weighting Cicurve
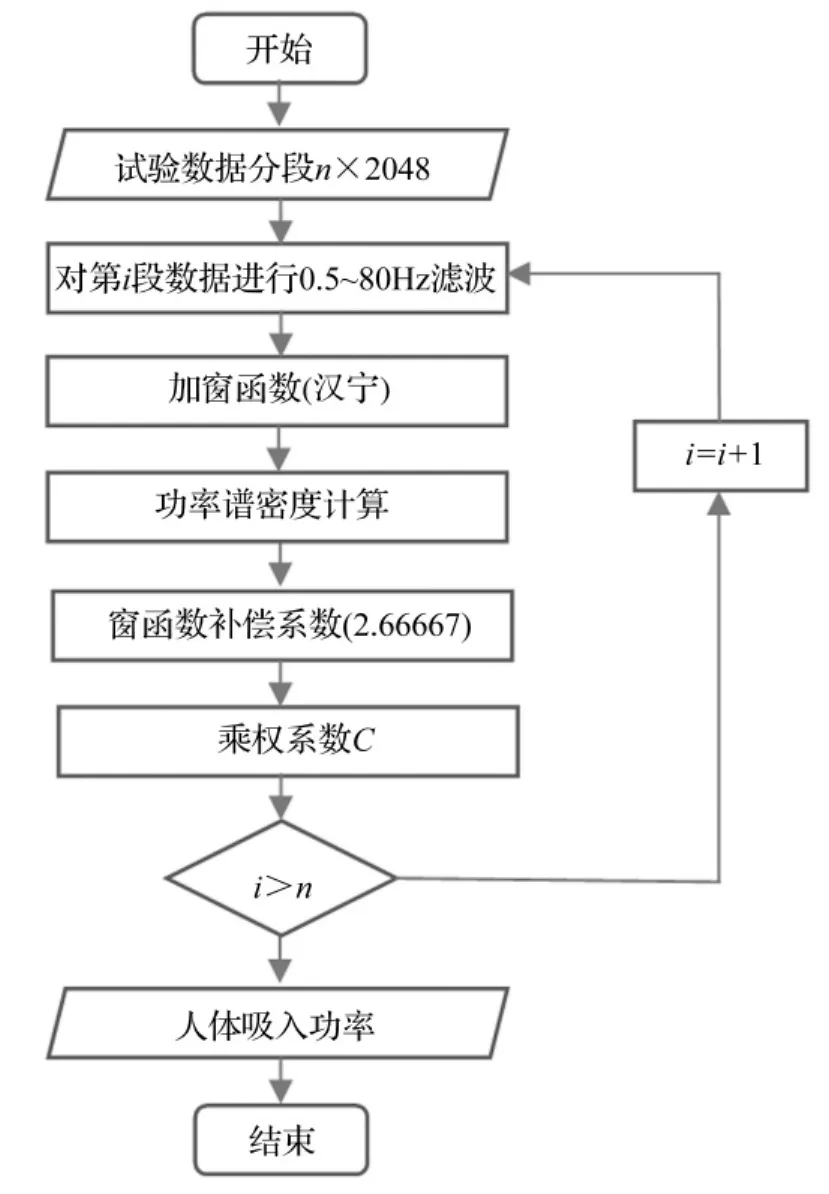
图5 人体吸入功率程序流程框图Fig.5 Absorbed power program flow diagram
4 试验测量
4.1 车辆偏频试验及参数识别
通过偏频试验计算识别获得试验车辆整车动力学参数[4,11]。偏频试验方法采用滚下法,即将汽车测试端车轮沿斜坡驶上图6的凸块,停车挂空档发动机熄火后将汽车车轮从凸块上推下,滚下时应尽量保证左、右轮同时落地。
试验车辆偏频试验过程见图7。已知轮胎气压为385 kPa,四分之一车辆整备质量为1 724 kg,通过偏频试验获得整车动力学参数见表2。
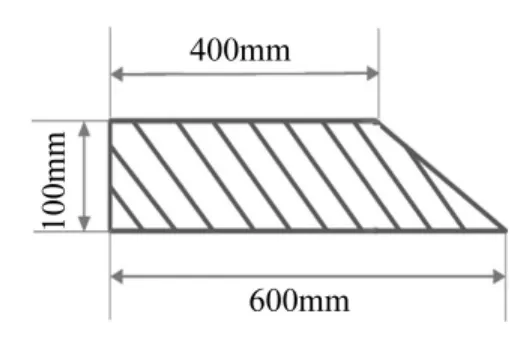
图6 凸块断面示意图Fig.6 Schematic of the block section plane

图7 车辆偏频试验Fig.7 Vehicle frequency offset test

表2 整车动力学参数Tab.2 Vehicle dynamics parameters
4.2 路面不平度测量
车辆在路面行驶时,路面不平度引起的振动通过轮胎、车身、座椅传递到驾驶员。故对试验路段不平度进行测量计算,试验路段见图8。
在式(2)、(3)中,若令y=z2-z1,则有

图8 试验路段Fig.8 Test road

测量悬架位移y,其均方值统计计算式[12]为

式中:A为路面不平程度;V为车辆行驶速度;u= m2/m1;ε=C/2m2。
估算路面不平程度A为
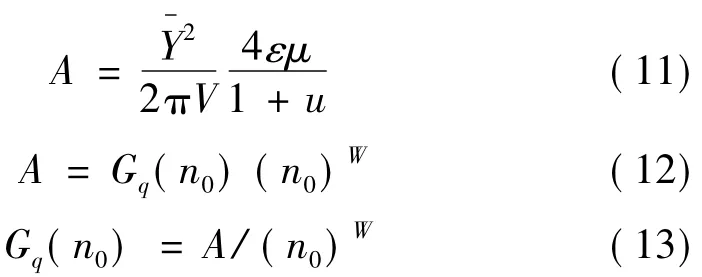
测量路面不平度时车辆以稳定低车速通过试验路段,能有效避免轮胎离开地面的可能性。车辆以V=20 km/h车速通过试验路段,得=324.540 2。
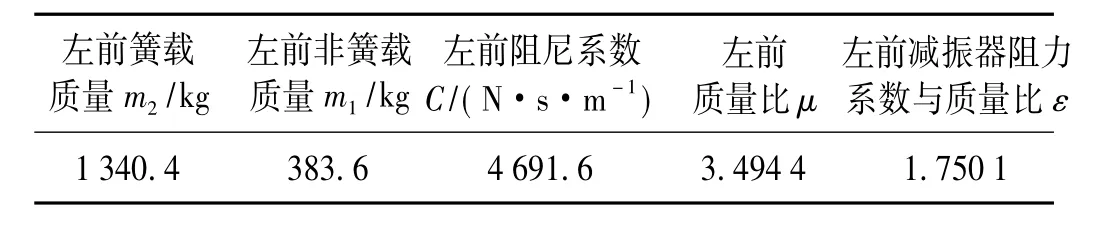
表3 试验车辆计算系数表Tab.3 Test vehicle calculation coefficients
国标路面不平度分级标准[13-15]n0=0.1 cycle/m,频率指数W=2,试验车辆参数见表3。据式(13)计算得Gq(n0)=0.005 062/m3,查表4知该试验路段属E级路面。
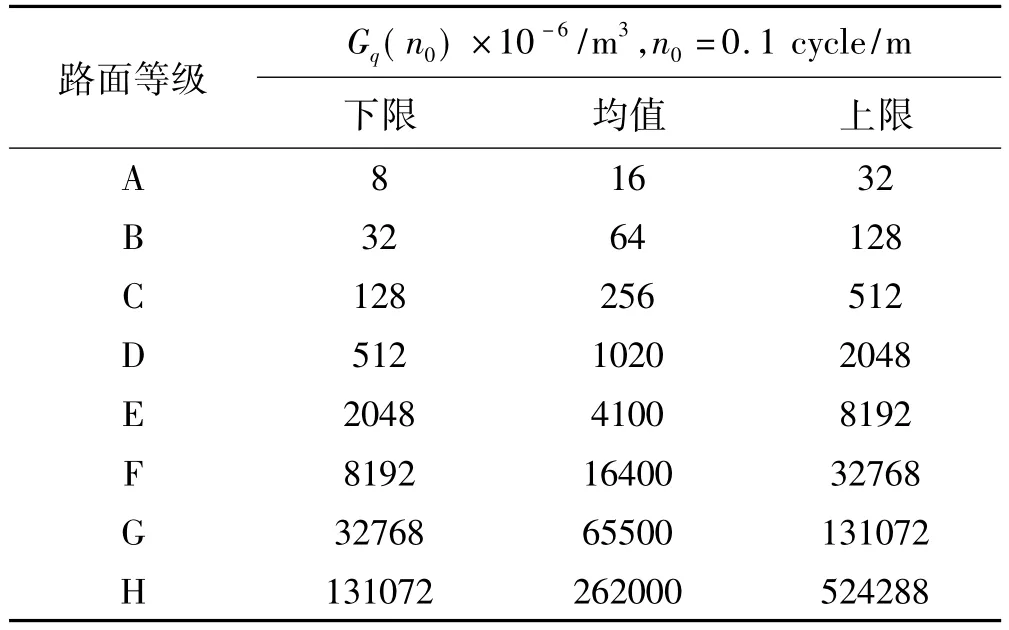
表4 路面不平度分级Tab.4 Road roughness grades
5 人体吸入功率仿真
5.1 傅里叶逆变换生成时序信号
利用上述计算结果,并用傅里叶逆变换方法生成试验路段时序信号[16]。路面不平度时域序列x(n)对应的傅里叶变换X(k),Gx(fk)为功率谱密度函数,即
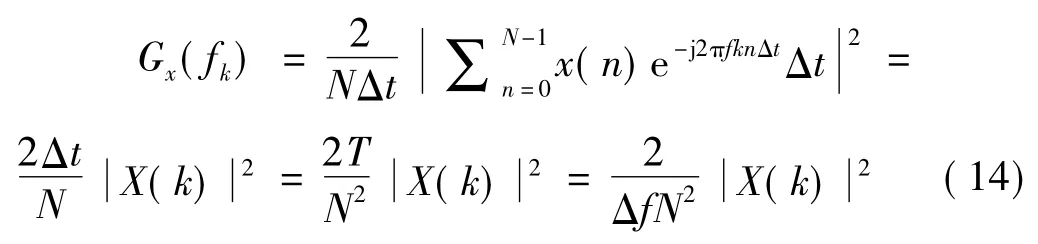
式中:n=0,1,2,…,N-1;k=0,1,2,…,N-1;f为采样频率,Δt=1/f;T为采样时间;N为采样点数。
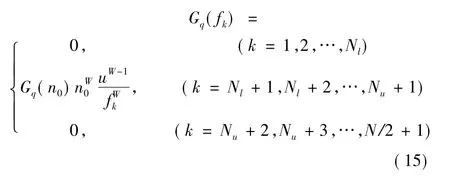
式中:Nl,Nu分别为上下截止频率(此处取0.5、80 Hz);u为车速;n0=0.1 cycle/m。
路面随机激励频谱Q(k)为

式中:k=1,2,…,N/2+1;φk为路面随机激励频谱相位,服从(0,2π)均匀分布。
据实数序列离散傅里叶变换性质,得采样点后一半频谱为

将复数序列Q(k)(k=1,2,…,N)进行傅里叶逆变换,得时域路面随机激励q(n)为

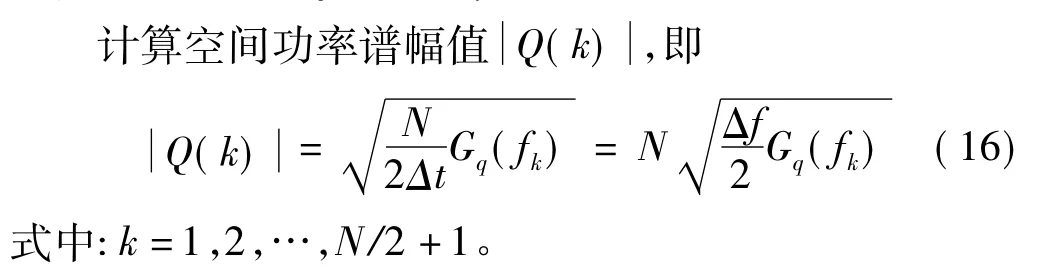
据式(15)~式(19)计算拟合获得试验路段不平度随机激励信号q(I),见图9。
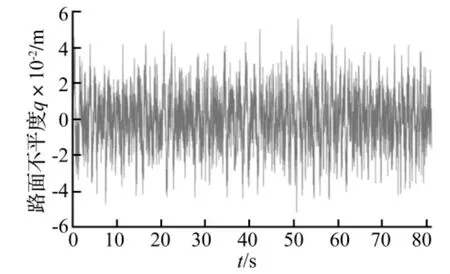
图9 计算所得试验路段不平度q(I)时序信号Fig.9 Road roughness q(I)sequence signals by the calculation
5.2 Simulink仿真
车辆在不平路段行驶时,由于路面不平度引起振动,使驾驶员难以控制车辆以稳定速度通过不平路段。因此通过试验方法很难准确对车辆机动性进行描述。而仿真软件可进行仿真试验,如Matlab Simulink可模拟仿真车辆高速通过不平试验路段,从而更准确评价试验车辆的真实机动性能[17]。据表2,利用Matlab Simulink软件仿真试验车辆在通过不平试验路段时的机动性能,仿真框图见图10。利用驾驶员座椅Z向加速度时序信号,据式(6)计算人体吸入功率,见图11。对比试验与仿真所得驾驶员Z向吸入功率结果表明,利用Matlab Simulink仿真及由试验所得数据具有一致性,表明仿真能替代试验描述车辆机动性能。图11中,吸入功率为6 W时试验越野车(UNIMOG)在该路段的机动性能为31.5 km/h。
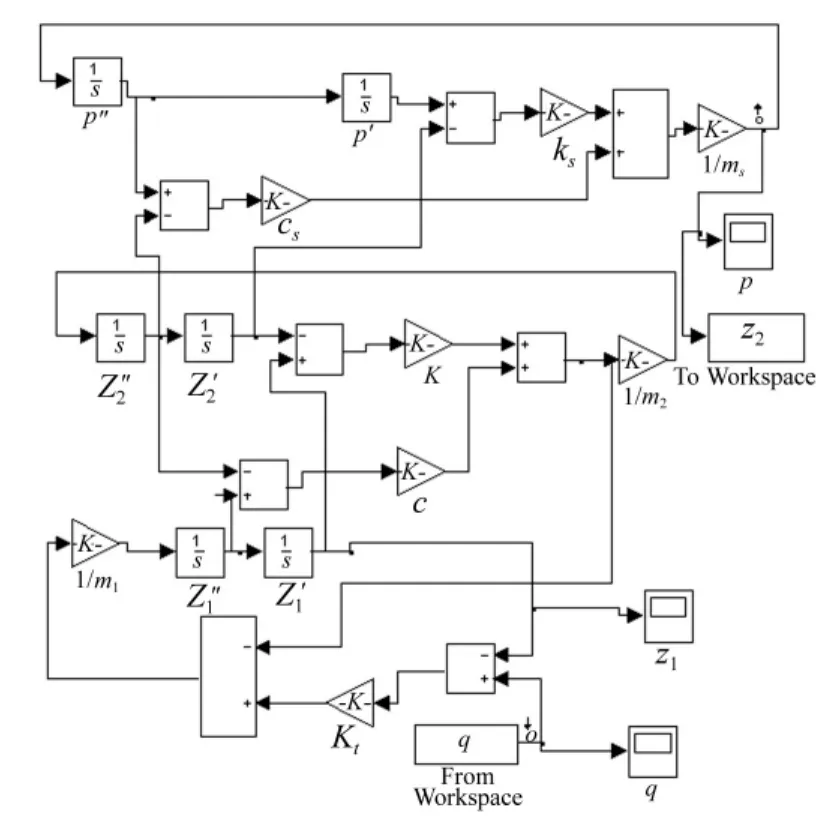
图10 Matlab Simulink仿真框图Fig.10 Matlab Simulink diagram
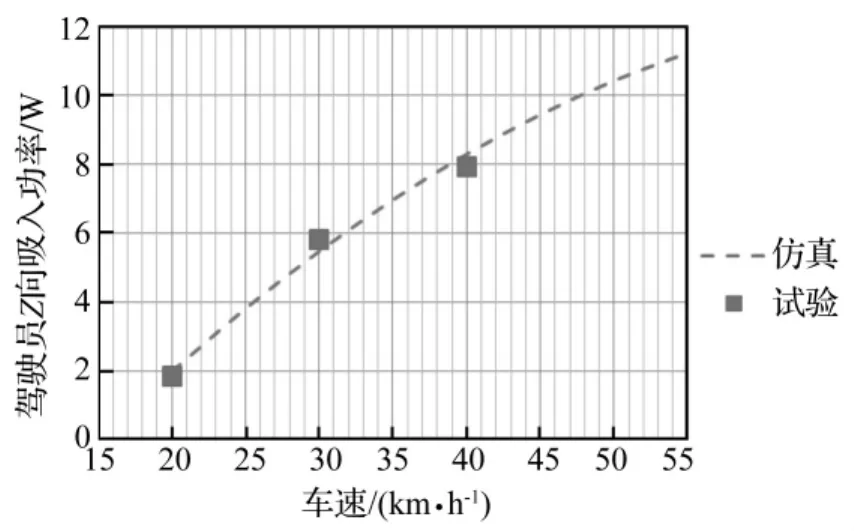
图11 人体吸入功率Fig.11 Human absorbed power
6 结论
本文通过为某奔驰越野车(UNIMOG-U4000)安装传感器进行偏频试验测量识别车辆轮胎、悬架及座椅主要参数;对试验路段进行路面不平度测量计算;用傅里叶逆变换生成不平路段时序信号作为仿真输入,利用Matlab Simulink软件仿真试验车辆在不平试验路段的机动性能;仿真计算得出吸入功率为6 W时试验车辆(UNIMOG)的机动性能为31.5 km/h。
[1]杨靖.浅谈军用车辆的越野机动性[J].方舱与地面设备,2007(2):18-24.
YANG Jing.Discussion on military vehicle mobility[J]. Shelter and Ground Equipment,2007(2):18-24.
[2]SAESP-1567,Commercial use of military truck technology[S].2000.
[3]SAE J1490-1999,Measurement and presentation of truck ride vibrations[S].
[4]余志生.汽车理论[M].北京:机械工业出版社,2007.
[5]赵济海,王哲人,关朝雳.路面不平度的测量分析与应用[M].北京:北京理工大学出版社,2000.
[6]段虎明,石峰,谢飞,等.路面不平度研究综述[J].振动与冲击,2009,28(9):95-101.
DUAN Hu-ming,SHI Feng,XIE Fei,et al.Road roughness study overview[J].Journal of Vibration and Shock,2009,28(9):95-101.
[7]ISO2631-1-1997,Mechanicalvibrationandshockevaluation of human exposure to whole-body vibration-part 2-vibration in buildings(1~80 Hz)[S].
[8]ISO 2631-2-2003,Mechanical vibration and shock-evaluation of human exposure to whole-body vibration-part 1[S].
[9]GB-T 4970-2009,汽车平顺性试验方法[S].
[10]Wong J Y.Theory of ground vehicles[R].Fourth Edition,Carleton University,Ottawa Canada,2008.
[11]GB/T 4783-1984,汽车悬挂系统的固有频率和阻尼比[S].
[12]郭孔辉.汽车振动与载荷的统计分析及悬架系统参数的选择[J].汽车技术,1976,4:1-15.
GUO Kong-hui.Automobile vibration and load statistical analysis and suspension system parameters selection[J]. Automobile Technology,1976,4:1-15.
[13]GB T7031-2005,机械振动道路路面谱测量数据报告[S].
[14]ISO-8608-1995,Mechanical vibration-road surface profilesreporting of measured data[S].
[15]王若平,焦贤正,王国林.基于汽车车身垂直加速度的典型道路路面谱识别研究[J].汽车工程,2008,30(12): 1047-1051.
WANG Ruo-ping,JIAO Xian-zheng,WANG Guo-lin.A study on road surface spectrum identification of typical roads based on the vertical acceleration of vehicle body[J].Automotive Engineering,2008,30(12):1047-1051.
[16]金睿臣,宋健.路面不平度的模拟与汽车非线性随机振动的研究[J].清华大学学报(自然科学版),1999,39(8): 76-82.
JIN Rui-chen,SONG Jian.Simulation of the road irregularity and study of nonlinear random vibration of the automobile[J].JournalofTsinghuaUniversity(Scienceand Technology),1999,39(8):76-82.
[17]李峻岩,万亦强,赵旗,等.军用汽车振动性能的仿真[J].中国科技论文在线,2010,10(5):807-812.
LI Jun-yan,WAN Yi-qiang,ZHAO Qi,et al.Vibration Performance simulation of military automobile[J].Science Paper Online,2010,10(5):807-812.
Mobility of off-road vehicle
HAN Yu1,2,MENG Guang-wei1,HUANG Chao-sheng2,MEN Yu-zhuo3
(1.School of Mechanical Science and Engineering,Jilin University,Changchun 130025,China;
2.China FAW Group Corporation R&D Center,Changchun 130011,China;
3.School of Mechatronics Engineering,Changchun Institute of Technology,Changchun 130012,China)
The problem of mobility of off-road vehicle on roughness roads was studied.The vehicle model parameters were identified by using frequency offset tests.The road roughness was estimated by testing the suspension displacement.The driver seat's vertical acceleration time series signal on roughness roads was detected.The absorbed power was calculated based on human tolerance limit.The‘human-vehicle body-wheel'three-degree-of-freedom vibration model was built.The road roughness time series signals were worked out by the inverse Fourier transform,and then were used as the input of the simulation.On the other hand,the driver seat's vertical acceleration signal on roughness roads was simulated by utilizing the Simulink software.The speed at absorbed power of six-Watt was suggested to indicate the mobility of the off-road vehicle passing through roughness roads.
vehicle mobility;road roughness;frequency offset test;dynamics simulation
U467.6
A
10.13465/j.cnki.jvs.2015.02.017
国家自然科学基金(51378075)
2014-07-04修改稿收到日期:2014-08-30
韩愈男,博士生,1979年生
孟广伟男,教授,博士生导师,1959年生
邮箱:mgw@jlu.edu.cn
