考虑附加质量的旋转柔性梁的随机动力学分析
2015-05-08靳红玲陈建军郭康权
靳红玲, 陈建军, 郭康权
(1.西北农林科技大学机电工程学院, 陕西 杨凌 712100;2.西安电子科技大学电子装备结构设计教育部重点实验室, 陕西 西安 710071)
考虑附加质量的旋转柔性梁的随机动力学分析
靳红玲1,2, 陈建军2, 郭康权1
(1.西北农林科技大学机电工程学院, 陕西 杨凌 712100;2.西安电子科技大学电子装备结构设计教育部重点实验室, 陕西 西安 710071)
研究了带有附加质量的旋转柔性梁系统在参数具有随机性时的动力响应问题。基于假设模态法和Lagrange方程建立了带有附加质量的柔性悬臂梁系统的一次近似耦合随机动力学方程,利用混沌多项式结合高效回归法将其转化为完全隐式纯微分方程,求解方程得到柔性悬臂梁变形响应的数字特征。最后,通过数值仿真对物理参数和几何参数具有随机性的系统进行动力特性研究。仿真结果表明:利用随机参数的动力学模型能客观地反映出系统的动力学行为;部分随机参数的分散性对柔性体动力响应的影响不可忽视。
柔性悬臂梁; 随机参数; 混沌多项式; 动力响应; 附加质量
引 言
随着航天器、机器人、机械系统等向高速化、轻质化、大型化和高精度方向发展,许多学者对进行大范围运动柔性悬臂梁的动力学问题进行了深入研究[1-4]。文献[5]考虑刚体作大范围平面运动时柔性梁的横向弯曲引起的纵向缩短,运用Lagrange方程推导出系统的刚柔耦合动力学方程,建立了较零次近似模型更精确的一次近似模型。文献[6]通过全物理仿真实验验证了动力刚化现象的存在以及一次近似耦合模型的合理性和正确性。
在传统的柔体动力学研究中,通常认为研究对象的所有物理参数和几何参数均是确定的或可精确测量的。事实上,由于多种随机因素的存在,使得基于确定性参数的动力学建模和分析结果无法反映出随机因素对系统动力特性的影响。因此,研究随机参数柔体动力学问题将具有重要的理论意义和现实的工程背景。目前,关于含有不确定性参数的柔性悬臂梁系统,尤其对末端附有集中质量的柔性悬臂梁系统的研究鲜有报道。文献[7]利用蒙特卡洛模拟法(Monte Carlo Simulation, MCS)对计及参数不确定性的柔性空间梁的动力学建模问题进行了研究,但该法需要样本量大,计算效率较低。文献[8]采用摄动法分析不确定的多体系统,该方法仅适合于小参数的情况。
混沌多项式(Polynomial Chaos,PC) 是一种非常严密的不确定分析方法,具有很强的数学基础,该方法采用正交多项式对不确定变量进行展开,通过正交多项式的特性,将随机变量的随机特性转移到多项式系数上。近年来,PC方法逐渐在复杂问题分析中取得了广泛的应用[9-11],该方法与MCS相比,在保证计算精度的前提下,可以显著减少模拟次数,提高计算效率。在PC的应用过程中,首要的工作是如何选取配点以求解混沌多项式展开式中的待定系数。现在常用的配点法是Isukapalli提出的高效回归法(Regression Method with Improved Sampling, RIS)[12],RIS建议配点数目取为待定系数的2倍以获得比其它配点法更为稳健和准确的解。
本文在文献[13]建立的考虑附加质量的柔性悬臂梁系统的一次近似刚柔耦合模型的基础上,利用高效回归法作为混沌多项式的配点求解展开式的待定系数,在系统大范围运动已知的条件下,对参数具有随机性的、考虑附加质量的柔性悬臂梁系统的动力特性进行了研究,重点通过仿真计算揭示系统参数的随机性及其分散性对动力特性的影响。
1 一次近似耦合动力学模型
文献[13]采用假设模态法和第二类Lagrange方程建立了带有附加质量的柔性悬臂梁的一次近似刚柔耦合动力学方程
(1)
本文在文献[13]给出的一次近似刚柔耦合动力学方程的基础上,建立了大范围运动规律为已知的系统动力学方程
(2)

为后续表述方便,式(2)可表示为

(6)
由文献[13]可知,公式(6)中各变量M,G,K,Q均是系统几何参数和物理参数的函数,若假设系统中的几何参数和物理参数构成了变量矢量,并用x=(x1,…,xn)表示,其中n表示系统中参数的个数,则式(6)可表示为

(7)
式中M(x),G(x),K(x),Q(x)分别为广义质量阵、广义陀螺阵、广义刚度阵和广义力阵。
2 随机动力学模型
2.1 混沌多项式
混沌多项式的基本思想是用含独立随机变量的正交混沌多项式之和近似表示随机过程。考虑一个随机过程Y(θ),其中θ为随机事件,为了进行数值计算,取有限项来近似表示输出响应量。精度达到p阶的PC可简化表示为
(8)
式中ξ=(ξ1,…,ξn)是服从标准正态分布的随机变量矢量,n为随机变量个数;H(ξ)=(H0(ξ),…,HN-1(ξ))是Hermite多项式;y=[y0,y1,…,yN-1]是混沌多项式展开式的待定系数矢量,待定系数个数N的表达式为
(9)
研究显示[12],混沌多项式展开的阶数越高,作为替代模型的PC将越接近原模型,但求解系数所需的方程个数也将随之快速增加,计算成本显著增加。通常情况下,取2阶的PC即可获得对Y较理想的近似,只有当2阶的PC不能满足精度要求时才考虑更高阶的混沌多项式展开。
2.2 随机参数动力响应分析


(10)

式中s为随机解的维数。
将式(11)~(13)代入方程(10)中,则有
(i=1,…,s;k=0,…,N-1)
(14)
由于H已知,式(14)中M(H),G(H),K(H),Q(H)为确定性矩阵。
利用Galerkin法对式(14)映射得
(15)

在得到混沌多项式系数yt之后,根据Hermite多项式的正交性,随机变量响应q的均值可通过下式求得[9]:
(16)
由式(16)可以看出,响应函数q的均值为其多项式混沌展开式的0阶项。归纳以上求解过程,给出求解随机参数空间柔性梁动力响应的流程如图1,其中k为时间节点总数。

图1 柔性梁动力响应的求解流程图Fig.1 Flowchart of solving the dynamic response of flexible beam
3 动力学仿真
对于带有附加质量的柔性悬臂梁结构进行研究,如图2所示[14],取中心刚体半径rA=0,梁长L=8 m。梁的横截面宽度y、高度z、体积密度ρ、弹性模量E和附加质量m均为服从正态分布的随机变量,它们的均值分别为μ(y)=3.6×10-2m,μ(z)=2.0×10-3m,μ(ρ)=2.766 7×103kg/m3,μ(E)=6.895 2×1010N/m2,μ(m)=0.085 kg。

图2 考虑附加质量的柔性悬臂梁系统Fig.2 Flexible beam with tip mass
柔性悬臂梁由静止开始作大范围旋转运动,角速度规律为
式中T为达到恒定转速之前的加速时间,取T=15 s,ω0为t>T时的恒定转速,分别取ω0=2,4和10 rad/s。
文中分别采用循环42次的二阶PC(简写为PC-2nd)和循环112次的三阶PC(简写为PC-3rd)求解该柔性悬臂梁末端的变形响应。图3给出了角速度ω0=4 rad/s,所有变异系数γall=0.05时,通过Matlab编程分别模拟42次PC-2nd和112次PC-3rd与模拟105次的MCS获得梁端变形位移响应的均值和标准差随时间变化的时程曲线。图4给出了ω0=4 rad/s,变异系数分别为γall=0.05和γall=0.1时PC-3rd获得梁端变形位移响应的均值和标准差随时间变化的时程曲线。图5给出了γall=0.05,角速度分别为ω0=2,4和10 rad/s时PC-3rd获得梁端变形位移响应的均值和标准差随时间变化的时程曲线。图6给出了γall=0.05,角速度分别为

图3 梁末端的位移响应(ω0=4 rad/s,γall=0.05)Fig.3 Tip displacement response of flexible beam (ω0=4 rad/s,γall=0.05)

图4 不同变异系数下梁末端的位移响应(ω0=4 rad/s)Fig.4 Tip displacement response of flexible beam with different coefficient of variation (ω0=4 rad/s)

图5 不同ω0下梁末端的位移响应(γall=0.05)Fig.5 Tip displacement response of flexible beam with different ω0 (γall=0.05)

图6 不同ω0下梁末端的速度响应 (γall=0.05)Fig.6 Tip velocity response of flexible beam with different ω0 (γall=0.05)

图7 不同随机参数时位移响应的标准差(ω0=10 rad/s)Fig.7 Tip standard deviation of displacement with different probabilistic parameters (ω0=10 rad/s)
ω0=2,4和10 rad/s时PC-3rd获得梁端变形速度响应的均值和标准差随时间变化的时程曲线。图7(a)给出了ω0=10 rad/s时,变异系数γall,γy,γz,γρ,γE,γm分别为0.05时梁端变形位移响应标准差的时程曲线,其中图7(b)为图7(a)在t=14 s附近位移响应的局部放大图。同时,表1给出了前20 s内,不同随机参数组合和不同角速度ω0时的随机模型梁端变形位移响应的绝对值的最大值。由图3~7和表1可见:(1)角速度ω0和变异系数γall相同的前提下,本文PC-2nd和PC-3rd与MCS得到位移响应的均值和标准差高度一致,说明本文方法的正确性和有效性;(2)角速度ω0相同的前提下,变异系数γall越大,响应的标准差越大,但响应的均值基本不变;(3)变异系数γall相同的前提下,角速度ω0越大,柔性悬臂梁的变形位移响应的均值的绝对值越大,位移响应的标准差也越大;(4)变异系数γall相同的前提下,角速度ω0越大,柔性悬臂梁的变形速度响应的均值的绝对值越大,速度响应的标准差也越大;(5)几何参数y的分散性对柔性梁变形位移响应的分散性影响较大,而体积密度ρ和附加质量m的分散性对变形位移响应的分散性影响很小,可以忽略不计。
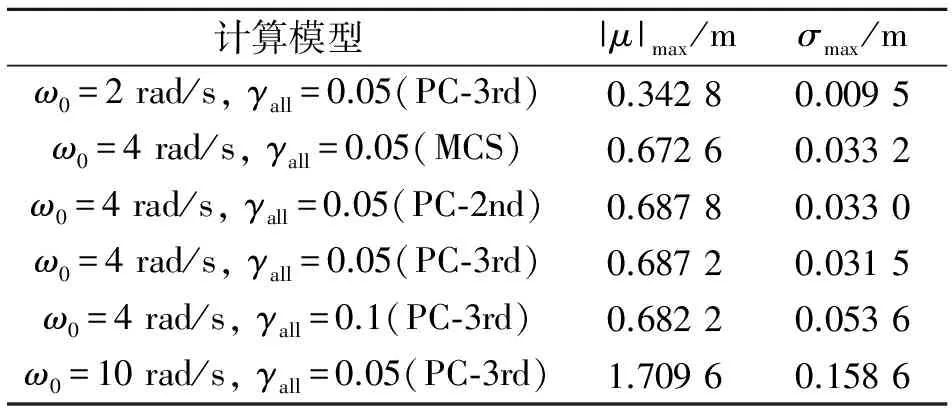
表1 不同随机变量对柔性梁位移响应数字特征的影响
4 结 论
本文对大范围运动规律为已知和参数具有随机性时的考虑附加质量的柔性悬臂梁系统的动力学问题进行了分析研究,获得了较好的效果,并得到以下结论:(1)混沌多项式可以应用于含有多个随机参数的带有附加质量的柔性悬臂梁系统动力响应分析,与MCS相比,在随机参数比较多时只需要很少次数的分析即可获得系统变形响应的主要数字特征,计算效率明显提高;(2)在相同角速度ω0前提下,不同的变异系数γall仅对位移响应的标准差有影响;在相同变异系数γall的前提下,不同的角速度ω0则对位移响应和速度响应的均值和标准差均有影响;(3)各参数的随机性对末端具有附加质量的柔性悬臂梁系统的动力响应的影响不可忽略,故欲增强系统动力响应的平稳性,应首先降低对系统动力响应影响较大参数的分散性;(4)通过MCS的验证表明,在考虑参数随机性时,文中建立的带有附加质量的柔性悬臂梁系统模型是合理的,且该模型能客观反映出实际工程中刚柔耦合体的动力学行为。
[1] Schiehlen W. Research trends in multibody system dynamics[J]. Multibody System Dynamics, 2007,18(1):3—13.
[2] 刘锦阳,崔麟.热载荷作用下大变形柔性梁刚柔耦合动力学分析[J].振动工程学报,2009,22(1):48—53.
LIU Jinyang, CUI Lin. Rigid-flexible coupling dynamics analysis for flexible beam with large deformation and applied with thermal load[J]. Journal of Vibration Engineering, 2009,22(1):48—53.
[3] 和兴锁,邓峰岩,王睿.具有大范围运动和非线性变形的空间柔性梁的精确动力学建模[J].物理学报,2010,59(3):1 428—1 436.
HE Xingsuo, DENG Fengyan, WANG Rui. Exact dynamic modeling of a spatial flexible beam with large overall motion and nonlinear deformation[J]. Acta Physica Sinica, 2010,59(3):1 428—1 436.
[4] 戎保,芮筱亭,王国平,等.多体系统动力学研究进展[J].振动与冲击,2011,30(7):178—187.
RONG Bao, RUI Xiaoting, WANG Guoping, et al. Developments of studies on multibody system dynamics[J]. Jounal of Vibration and Shock, 2011,30(7):178—187.
[5] 吴胜宝,章定国.大范围运动刚体-柔性梁刚柔耦合动力学分析[J].振动工程学报,2011,24(1):1—7.
WU Shengbao, ZHANG Dingguo. Rigid-flexible coupling dynamic analysis of hub-flexible beam with large overall motion[J]. Journal of Vibration Engineering, 2011,24(1):1—7.
[6] 杨辉,洪嘉振,余征跃.动力刚化问题的实验研究[J].力学学报,2004,36(1):118—124.
YANG Hui, HONG Jiazhen, YU Zhengyue. Exprimental investigation on dynamic stiffening phenomenon[J]. Acta Mechanica Sinica, 2004,36(1):118—124.
[7] 张海根,何柏岩,王树新,等.计及参数不确定性的柔性空间曲线梁动力学建模方法[J].天津大学学报,2003,36(1):37—40.
ZHANG Haigen, HE Baiyan, WANG Shuxin, et al. Dynamic model of flexible spatial camber beam with uncertainty parameters[J]. Journal of Tianjin University, 2003,36(1):37—40.
[8] Wang S X, Wang Y H, He B Y. Dynamic modeling of flexible multibody systems with parameter uncertainty[J]. Chaos, Solitons & Fractals, 2008,36(3):605—611.
[9] Sandu A, Sandu C, Ahmadian M. Modeling multibody systems with uncertainties. Part I: Theoretical and computational aspects[J]. Multibody System Dynamics, 2006,15(4):369—391.
[10]Wei D, Cui Z, Chen J. Robust optimization based on a polynomial expansion of chaos constructed with integration point rules[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2009,223(5):1 263—1 272.
[11]赵轲,高正红,黄江涛,等.基于PCE方法的翼型不确定性分析及稳健设计[J].力学学报,2014,46(1):10—19.
ZHAO Ke, GAO Zhenghong, HUANG Jiangtao, et al. Uncertainty quantification and robust design of airfoil based on polynomial chaos technique[J]. Chinese Journal of Theoretical and Applied Mechanics, 2014,46(1):10—19.
[12]Isukapalli S S. Uncertainty analysis of transport-transformation models[D]. Rutgers: The State University of New Jersey, 1999.
[13]陈思佳.刚-柔耦合问题与空间多杆柔性机械臂的动力学建模理论研究[D].南京:南京理工大学,2012.
CHEN Sijia. Researches on the rigid-flexible coupling problem and the dynamic modeling theory of multi-link spatial flexible manipulator arms[D]. Nanjing: Nanjing University of Science & Technology, 2012.
[14]Cai G P, Hong J Z, Yang S X. Dynamic analysis of a flexible hub-beam system with tip mass[J]. Mechanics Research Communications, 2005,32(2):173—190.
Stochastic dynamic analysis of rotating flexible beam with tip mass
JINHong-ling1,2,CHENJian-jun2,GUOKang-quan1
(1. School of Mechano-electronic Engineering, Northwest A & F University, Yangling 712100, China; 2. Key Laboratory of Electronic Equipment Structure Design, Ministry of Education, Xidian University, Xi′an 710071, China)
Dynamic response of rotating flexible beam with tip mass and uncertain parameters is investigated. Based on assumed modes method and Lagrange′s equations, the first-order approximation coupling stochastic dynamic equations are derived.The polynomial chaos method and a regression-based collocation method are applied to derive system of completely implicit differential equations. The resulting system of equations is then used to find the numerical characteristics of the response. As an illustrating example, dynamic modeling of flexible hub-beam system considering probabilistic geometric and physical parameters is presented. Simulation results demonstrate that probabilistic parameters have effect on the dynamic response of the flexible beam, and the dynamic modeling with probabilistic parameters can objectively reflect the actual dynamic response of flexible system.
flexible cantilever beam; probabilistic parameters; polynomial chaos; dynamic response; tip mass
2014-07-03;
2015-05-12
国家自然科学基金资助项目(51375401);中央高校基本科研业务费专项基金资助项目(2452015058);中国博士后科学基金资助项目(2015M582709)
O326; O324
A
1004-4523(2015)06-0960-06
10.16385/j.cnki.issn.1004-4523.2015.06.014
靳红玲(1975—), 女, 讲师。电话:15991270635;E-mail:jhl@nwsuaf.edu.cn
郭康权(1955—),男,教授。电话:15929317953;E-mail: jdgkq@nwsuaf.edu.cn
