距离-多普勒二维处理在防撞雷达中的应用
2015-04-20陈大海王磊磊陶坤宇
陈大海, 王磊磊, 陶坤宇
(上海无线电设备研究所,上海200090)
0 引言
防撞雷达要实现其功能,不但要完成目标距离速度的测量,还需要具备多目标识别能力。在防撞雷达系统中,线性调频连续波(LFMCW)体制应用最广泛。简单的线性调频可以分为三角波调制和锯齿波调制。锯齿波调制形式较简单,但存在严重的距离速度耦合问题,因此在动目标检测上有巨大缺陷。三角波调制采用正负斜率频谱配对,解决了距离速度的耦合,并且系统实现相对简单,因此应用广泛,但是该方式也存在明显的缺点[1]。在多目标情况下,采用频谱配对方法会产生多个虚假目标,导致目标识别困难。研究者针对多目标识别提出了一些改进方法[2],如变周期调制、多斜率调频、逐次逼近法等,虽然解决了虚假目标问题,但是也大大提升了系统的复杂度和工程实现难度,因此都不是理想的方法。
本文研究的距离-多普勒二维处理方法很好地解决了多目标识别问题。该方法应用于锯齿波线性调频系统中,通过多周期积累抑制固定杂波、简化目标环境,可以在复杂的环境中实现运动目标的距离速度去耦合[3]。该方法运用于防撞雷达系统,在较低的系统复杂度下可以实现多个动目标的测距测速,因此比较有实用价值。
1 距离-多普勒二维处理方法分析
在锯齿波线性调频系统中,设f0为信号载频,B 为 调 频 带 宽,T 为 调 频 周 期,c为 光 速,v 为目标速度,根据线性调频信号特点可知回波信号与发射信号的差拍信号仍是一个线性调频信号[4],对其作频谱分析得到差频fΔ,进而可得到目标距离

虽然,距离中耦合了速度信息。
设目标多普勒频率为fD,可得出目标速度为

可见只需求出fΔ与fD,即可得知目标的距离和速度。
根据上述分析,距离-多普勒二维处理方法实现步骤:将单个调频周期的采样数据[a,b,c,d,e…]进行FFT 变换,得到频谱[A,B,C,D,E…],分析后可得到差频fΔ,积累多个周期数据后得到矩阵
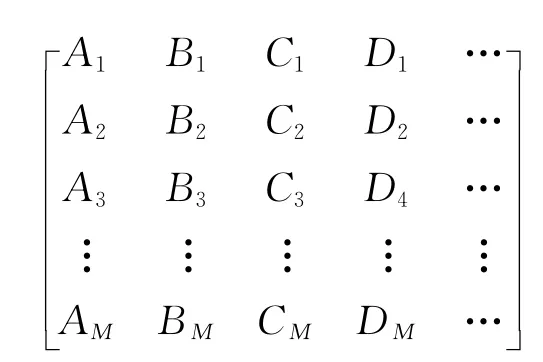
通过多个周期间的包络变化得到目标速度信息,即对多周期数据对应的每个距离单元如[A1,A2,A3,…,AM]进行FFT 变换,得到多普勒频率fD。通过式(1)和式(2)便可计算出目标的距离和速度。
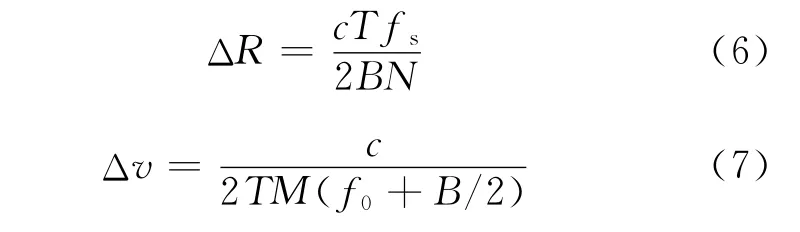
二维FFT 处理对调频周期T 有约束条件。第二维FFT 处理相当于对第一维FFT 的结果进行周期为T 的等间隔采样,根据奈奎斯特采样定理,为保证多普勒频率不混叠,采样频率fs=1/T应大于信号最大频率fD的两倍[4]。设需要检测的最大速度为vmax,则其对应的多普勒频率为

则

因此,调频周期需要降低到足够小,才可以保证测速不模糊。设ΔR 为距离分辨率,此时距离速度耦合引起的距离误差

可忽略不计,因此距离速度耦合已消除。
设第二维FFT 点数为M,则一次二维FFT信号积累时间为M×T,在防撞雷达系统中典型值为几毫秒,虽然高于三角波调制下的处理周期,但仍小于系统要求的刷新频率(约50 ms),并且由于多周期积累,获得了更高的信噪比和测速精度。
2 防撞雷达系统参数设计与仿真
已知防撞雷达系统信号载频f0=77GHz,现欲设计测距精度ΔR=0.5 m,测速精度Δv=1m/s。设一维FFT 点数为N,二维FFT 点数为M,根据式(1)和(2)可知[5]
经过计算选取以下系统参数:调频带宽B =300 MHz,调频周期T=25.6μs,采样频率fs=20 MHz。一维FFT 点数N=512,二维FFT 点数M=128。
假 设 有 两 个 目 标,其 中R1=40 m,v1=20m/s,R2=80m,v2=10m/s,在MATLAB 中对二维FFT 方法进行仿真。程序在每个周期内采样512个数据后进行512点的FFT 运算,然后将128个周期的FFT 结果进行第二维128点的FFT 运算,之后对实部和虚部求模。仿真运行后的结果,如图1所示。
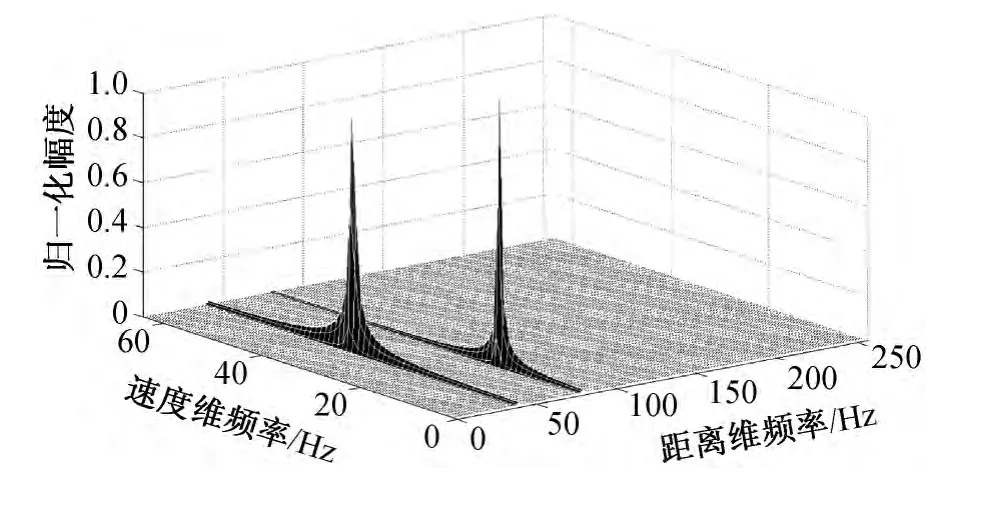
图1 二维FFT 仿真结果
三维图中两个尖峰的坐标分别为(80,35)和(160,18),可 计 算 出fΔ1=3.125 MHz,fD1=10.376kHz,fΔ2=6.25 MHz,fD2=5.188kHz。代入 式(1)和(2),得 出R1=39.74 m,v1=20.13m/s,R2=79.93 m,v2=10.06 m/s,结果都在设定的精度范围之内。
仿真结果表明,该方法可以有效区分距离速度不同的目标,并且求解的距离速度的精度都符合初始设计。
3 二维处理的实现与验证
距离-多普勒二维处理由于在短时间内要进行多次FFT 运算,因此对硬件处理能力有一定要求。一次测量需要完成M 次N 点FFT 以及N次M 点FFT,这些运算都必须在一个刷新周期内完成。考虑到FPGA 擅长并行处理,系统采用DSP+FPGA 的架构,所有的FFT 运算在FPGA中进行,DSP 完成解算与其他控制,两者通过EMIF接口连接。系统采用两块SRAM 实现乒乓存储,一维FFT 的数据先存储在SRAM1中,待完成M 次后,FPGA 从SRAM1中读出数据作第二维FFT 运算,此时一维FFT 的结果存储至SRAM2中,如此交替存储,实现连续测量。二维FFT 完成后的频谱数据传输至DSP 中进行目标识别与距离速度解算。
图2为信号处理平台结构框图,A/D 采样信号存入FPGA 的FIFO 中,待存满一个周期后(512点),送 入512-FFT 模 块 进 行512 点FFT运算,结果存入SRAM,等到128个周期都完成后,数据从SRAM 读出至128-FFT 模块进行128点FFT 运算,结果存入FIFO,待DSP 来读取。
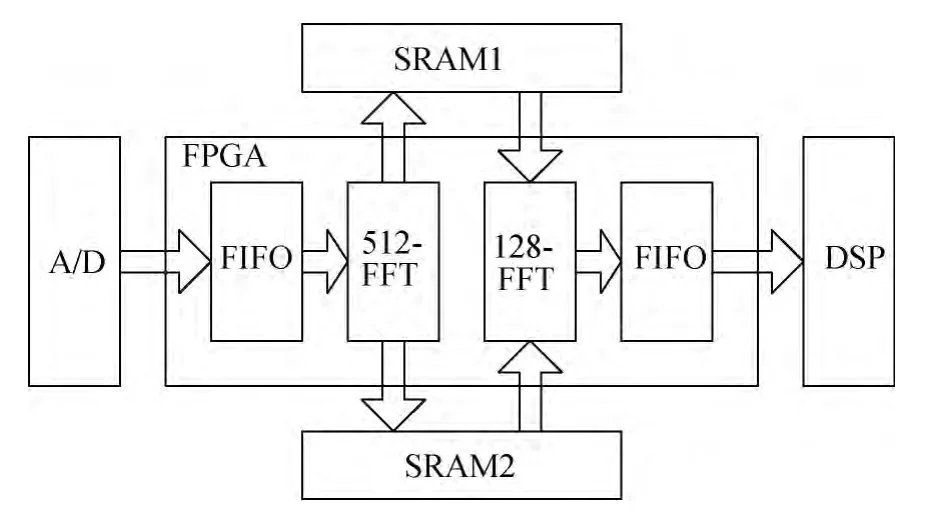
图2 信号处理平台结构框图
根据系统要求,采用12 位20MSPS 的AD9 238完成对差拍信号的采样,数据以并行方式送入FPGA 处理。FPGA 选用Xilinx 公司的XC3SD3400A,该芯片具有126个最高工作频率为250MHz的DSP48A 数字信号处理单元,以及2 268K 的Block RAM,适合完成大量运算。静态存储器采用CY7C1011DV33,速度级别10ns,存储空间达2 Mbit。DSP 采用TI 公司的TMS320F2812,具有16位EMIF接口,可方便的从FPGA 读取数据进行解算,结果最后通过SCI发送至上位机。
本设计中,FFT 运算采用Xilinx公司提供的IP 核,设FFT 都 采 用 基-4 算 法,数 据 长 度 为16bit,FFT 运算时钟为100MHz,则完成512点FFT时间为17.72μs,小于一个采样周期25.6μs。完成128 点FFT 时间为4.72μs,则完成二维FFT 算法的时间为4.72μs×512=2.4ms,小于128个周期的采样时间128×25.6μs=3.2 ms,可以连续处理。中间数据需要的存储空间为128×512×2×16bit=2 Mbit,可见硬件平台的实现能力满足系统要求。
根据以上方案设计的防撞雷达系统,在实际路况下以汽车为目标进行测试试验,得到的频谱数据绘出三维图,如图3所示。
从图中可明显分辨出两个主要目标,根据横纵坐标解算的频率信息即可求出距离速度。可见,该方法运用于防撞雷达系统,可以有效分辨多个不同距离速度的目标,并实现各个目标的测距测速。
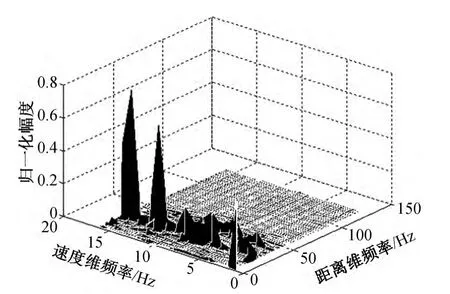
图3 样机试验结果
4 结论
在防撞雷达系统中,简单的锯齿波调制和三角波调制都存在固有的缺陷,都不是理想的实现方法。锯齿波线性调频与距离-多普勒二维处理相结合的方法充分利用了相位信息,可以在较低的系统复杂度下实现多个目标的无模糊测距测速。通过对该方法的仿真、硬件实现与试验,表明该方法适合应用于防撞雷达系统,但该方法运算量较大,对硬件平台的处理能力有一定要求。
[1] 王月鹏.对称三角线性调频连续波雷达技术研究[D].西安:西安电子科技大学,2005.
[2] 刘艳.FMCW 汽车防撞雷达的多目标信号处理方法研究[D].南京:南京理工大学,2004.
[3] 江玲.低截获概率雷达信号处理算法实现[D].西安:西安电子科技大学,2007.
[4] 王月鹏,赵国庆.二维FFT 算法在LFMCW 雷达信号处理中的应用及其性能分析[J].电子科技,2005,(5):25-28.
[5] 杜川华,龚耀寰.LFMCW 雷达的距离/多普勒处理[J].电子科技大学学报,2004,33(1):27-30.
