某型航空发动机的温度传感器惯性补偿研究*
2015-04-08王立国邓罗泉刘卓崴郑铁军
王立国, 邓罗泉, 刘卓崴, 郑铁军, 程 礼
(空军工程大学 航空航天工程学院,陕西 西安710038)
某型航空发动机的温度传感器惯性补偿研究*
王立国, 邓罗泉, 刘卓崴, 郑铁军, 程 礼
(空军工程大学 航空航天工程学院,陕西 西安710038)
针对某型航空发动机温度传感器的测量滞后问题,提出了传感器的惯性补偿方法。该方法首先求得时间常数,并采用最小误差原则对时间常数进行修正,然后将时间常数写入补偿环节,最后使用二次指数平滑法对补偿曲线进行修正。通过仿真与实验验证,求出了时间常数并实现了温度补偿,表明该方法是有效的,能够用于温度传感器的惯性补偿。
传感器; 惯性补偿; 时间常数; 时间序列
0 引 言
航空发动机涡轮后燃气温度T6是表征发动机工作状态的重要参数[1],需要准确地测量。而测量T6的温度传感器是由物理元器件构成,由于材料属性与结构的限制,无法瞬间完成热能交换[2],这就导致了测量值的滞后,影响发动机燃气温度控制系统的正常工作,因此,需要对温度传感器进行惯性补偿。程建华[3]设计的软件补偿和滤波的方法能够定期为测温回路进行测定补偿,但主要适用于恒温系统,不能满足发动机要求;夏敦柱[4]提出了使用神经网络进行传感器补偿的方法,但神经网络计算量大,对样本数据质量、数量的依赖程度高,应用实例与网络规模易产生矛盾等。
为更好地实现温度补偿,某型航空发动机的控制系统中使用了一部分补偿电路,但有很多关键性技术有待研究解决,比如:时间常数和如何实现温度补偿等。
本文主要在分析硬件电路基础上,验证了温度补偿原理的实现过程,并提出了时间常数的求取方法和传感器数据的处理方法。按照最小误差原则对求时间常数做了创新性工作,并尝试使用时间序列法解决补偿不理想问题。各种方法应用的效果已通过仿真和实验验证。
1 补偿电路原理
温度补偿装置原理结构图如图1所示。

图1 温度补偿装置图
该装置补偿思路是将传感器输出的滞后温度T6输入到一个传递函数为τs+1的补偿环节,使补偿环节输出的温度与输入的温度相同,如图2所示。

图2 温度补偿流程图
其中,T6为涡轮后燃气温度,τ为温度传感器时间常数。
2 时间常数的获得
本文对比了几种常用惯性环节时间常数的求取方法,从中选取适于涡轮后燃气温度测量的一种。
2.1 温度传感器一阶惯性模型
假设传感器内部温度分布均匀、没有辐射换热并忽略导热,考虑发动机温度传感器安装的保护套,由文献[5]知传感器模型为二阶惯性模型,可以直接使用简单的一阶惯性模型来代替。虽然一阶模型缺少二阶模型的某些特征或有其他缺陷[6],但对于发动机控制系统的温度补偿是无关参数,因此,传感器模型如公式(1)所示
(1)
式中Ts,Tm分别为传感器与介质温度,τ为传感器敏感体与保护套共同的时间常数。
2.2 求取时间常数
2.2.1 定义法
由一阶系统阶跃响应曲线知,响应值从初始值上升到终值的63.2 %所用时间,即为阶跃响应的时间常数
τ=0.632Tm.
(2)
仿真数据中一般没有准确的响应值,故先对数据进行拉格朗日插值,再求时间常数。
2.2.2 温度变化法
根据温度传感器的惯性模型公式(1),得通解为
Ts=C′e-t/τ+Tm.
(3)
可导出τ的公式
(4)
式(4)表明:只要知道Tm-Ts,就可求出时间常数τ。
2.2.3 斜率法
对式(1)移项,可得
τ=(Tm-Ts)/(dTs/dt).
(5)
表明只要得到曲线斜率,即可得到时间常数τ。
2.3 时间常数仿真实验
利用Matlab软件构建一阶惯性系统,取单位阶跃量和几组合适的时间常数,验证三种方法的有效性。
表1中的实验数据表明:经拉格朗日插值的定义法和温度变化法在时间常数为0.9~8的范围没有误差,斜率法计算时认为相邻数据按照直线变化,而实际曲线按指数规律变化,导致误差的出现。由于时间常数会随着外界条件如温度的变化而变化,而温度变化法可以实现对求得的时间常数进行实时修正,因此,本文将温度变化法作为求取惯性时间常数的方法。
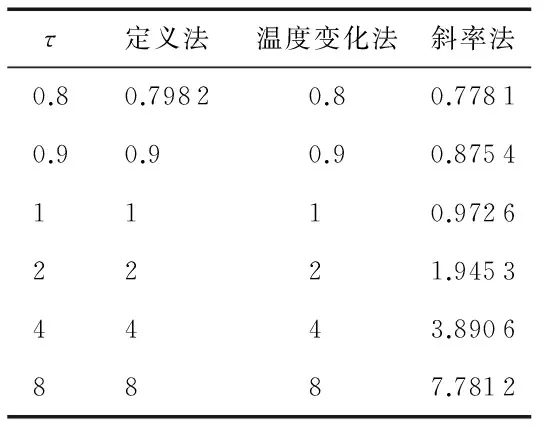
表1 时间常数仿真结果对照表
3 实验验证
利用仿真求得时间常数,在Matlab上能容易地得到理想的补偿曲线,这里不再赘述。利用搭建的实验平台,对温度传感器惯性补偿方法进行了实验验证。由于补偿方法具有通用性,因此,实验中未选择某型航空发动机测量排气温度的热电偶,而是使用了温度易于获取的数字化温度传感器DS18B20,该传感器体积小,可实现高精度测温,时间常数约在1~5 s之间,适用于本实验需要。表1数据表明:使用温度变化法可以准确得到DS18B20的时间常数。
3.1 实验平台描述
以Atmel公司的89C51单片机为控制器,实验平台如图3所示。第一次测量温度属于系统学习过程,从第二次测量开始为带有补偿温度的输出。

图3 实验装置连接图
将传感器从室温21 ℃迅速放入83 ℃热水中,测得实验数据[7],如图4中曲线所示。

图4 DS18B20阶跃响应曲线
从图4中可以看出:实际测得的曲线有波动,在计算时间常数时必然会出现误差,比如在A点求得的时间常数为负值,因此,需要先对曲线进行平滑处理。
3.2 求取时间常数与补偿温度
最小二乘法是通过最小化误差的平方和寻找数据的最佳函数匹配的数学优化技术。可用于参数估计与曲线拟合[8]。本文利用最小二乘法对实验数据进行拟合,拟合曲线如图5所示,可以看出:比较理想的范围是2~6次,从第5次拟合开始曲线出现大的波动,3次拟合的阶跃上升部分高于其它阶次曲线,2次拟合则偏低,所以,温度数据拟合选为4次。

图5 2~6阶最小二乘拟合的曲线
从拟合的曲线上按照0.05 s时间间隔读取数据,采用温度变化法求出时间常数。为得到实时准确的时间常数,以最小误差为原则对时间常数进行修正
(6)
式中 τ′为第t次校正后的时间常数,τ为第t次计算的时间常数,ζ为修正系数, error(t-1)-t为第t-1次与第t次时间常数差值。
经计算发现,时间常数主要在τ=1.83附近浮动,且呈不明显的变大趋势,表明该方法是有效的。
将时间常数写入补偿环节,绘制仿真曲线如图6所示。
由图6可以看出:曲线波动幅度很大,效果不理想,没起到温度补偿作用。分析原因:一是传感器测量的不准确性,比如:在t=τ时刻传感器输出值不一定是阶跃值的63.2 %,可能偏大或者偏小;二是本文把传感器二阶惯性模型建立为一阶惯性模型,导致使用的一阶惯性补偿策略对实际的二阶模型并不适用,出现了过补偿或欠补偿的现象,所以,还需进一步对补偿工作进行改善。
3.3 补偿曲线的校正
时间序列法是通过对预测目标时间序列的处理来研究其变化趋势的。众多学者已经将它引入工程实践中[9],并取得了良好效果。
本文根据补偿温度时间序列应呈直线趋势的特点,将移动平均公式改进为一次指数平滑公式,然后在一次指数平滑基础上,利用滞后偏差规律建立直线趋势模型,作二次指数平滑
(7)


(8)

(9)
其中
(10)
由于实测温度数据也会存在误差,导致由数据求得的系数有误差,为避免此问题,在采集到数据后对各系数利用公式(11)进行修正
(11)
式中 λj(j=1,2)为调整常数,实验经多次调整,选定λ1=0.03,λ2=0.02为最佳参数,ei+1为第t+1实测温度与预测温度的预测误差。这样当系统a,b的选择偏大时,误差ei+1为负值,可以调小系数;反之,亦然。历史观测值个数为20,此方法得到的响应曲线如图7所示。

图7 时间序列法整理的曲线
从图7中可看出:补偿过后的调节时间比补偿前缩短约5s,约占原调节时间的65.7 %,效果比较理想。故认为在补偿环节用时间序列法处理后的数据是可行的,能够实现实时地补偿温度。
4 结 论
本文某型航空发动机涡轮后燃气温度补偿的实际问题出发,解决了如何求得时间常数和实现温度补偿的问题,并得出如下结论:
1)在不考虑外界条件对时间常数影响的前提下,使用温度变化法能够较为准确地求得温度传感器的时间常数。
2)针对时间常数随外界因素变化而变化的情况,按照时间常数修正公式能够有效地进行实时修正。
3)对于补偿实验中出现的补偿曲线大幅度波动问题,可采用了基于时间序列的二次指数平滑法,同时对平滑公式系数进行校正来解决。
本文所提出的方法具有一般适用性和参考性,可应用于流量、压力等其他形式的惯性系统。
[1] 王海涛,谢寿生,胡金海,等.基于Volterra-Laguerre拓展模型的发动机加速过程辨识[J].航空动力学报,2009,24(2):465-469.
[2] Tian Feifei,Cong Jiawei,Yun Binfeng,et al.A fiber Bragg grating current sensor with temperature compensation[J].Optoelectronics Letters,2009,5(5):347-351.
[3] 程建华,罗立成,王鑫哲.高精度测温系统的测温补偿算法研究[J].传感器与微系统,2010,29(11):36-39.
[4] Xia Dunzhu,Wang Shourong,Zhou Bailing.Temperature compensation method of silicon microgyroscope based on BP neural network[J].Journal of Southeast University:English Edition,2010,26(1):58-61.
[5] 鹿晓力,路立平,李 奎,等.温度传感器动态特性完全补偿方法研究与补偿电路设计[J].郑州大学学报:工学版,2012,33(3):65-70.
[6] Shi Jian,Zhang Shuyou.Model order reduction for coupled dynamic characterization of torsional micromirrors[J].Chinese Journal of Mechanical Engineering,2011,24(5):829-835.
[7] 刘宗瑞,咸婉婷,刘志远.热电偶动态响应测试系统[J].传感器与微系统,2014,33(6):82-85.
[8] Yu Shengwen,Dong Jun,Wang Aimin.Least squares fitting of coordinate paramaters model[J].Trans on Nonferrous Met Soc China,2005,15(1):189-191.
[9] Hu Liang,Che Xilong.Parameter selection in time series prediction based on nu-support vector regression[J].High Technology Letters,2009,15(4):337-342.
Inertial compensation study of temperature sensor in aeroengine*
WANG Li-guo, DENG Luo-quan, LIU Zhuo-wei, ZHENG Tie-jun, CHENG Li
(College of Aeronautics and Astronautics Engineering,Air Force Engineering University, Xi’an 710038,China)
Aiming at problem of measurement hysteresis of temperature sensor in a type of aeroengine,a method for inertial compensation of sensor is proposed.This method firstly gets time constant,and advice it adopt least error rule;then applys time constant to compensate;finally,secondary exponential smoothing method is used to revise the compensation curve.By simlation and experimental verification,time constant is obtained and temperature compensation is realized,and it shows that the method is effective and it can be used for inertial compensation of temperature sensor.
sensor; inertial compensation; time constant; time series
10.13873/J.1000—9787(2015)03—0066—03
2014—12—17
国家自然科学基金面上项目(51175509)
TH 81
A
1000—9787(2015)03—0066—03
王立国(1989-),男,吉林省长春人,硕士研究生,研究方向为航空宇航科学与技术、航空发动机控制。
