基于星图模拟的星空目标提取
2015-03-29徐韬祜孙华燕张廷华
徐韬祜,孙华燕,张廷华,都 琳
(1.装备学院研究生院,北京101416;2.装备学院光电装备系,北京101416)
1 引言
通过地基设备对空间目标进行观测时,由于星空背景的影响,空间目标淹没在大量的星体背景中,因此星空背景下的空间目标提取成为普遍关注的难点问题。
目前空间目标提取方法主要针对单帧或多帧图像,其中,单帧图像提取一般是基于目标信号特征进行滤波,由于信噪比极低,此类方法通常无法使用[1],多帧检测多是基于目标运动轨迹连续特性的检测,将连续两帧图像配准、差分、二值化与后一帧边缘提取的图像进行逻辑乘,得到目标[2],此方法对于前后两帧时间间隔较长,有恒星进场或出场导致无法配准的情况不适用。文献[3]还提出了一种将序列图像叠加得到恒星背景图像,并对星点图像进行膨胀处理后生成掩模,利用生成的掩模对序列星图进行去除恒星背景的处理,此方法只适用于序列图像中恒星像素坐标相对运动较小的情况。
针对这些问题,本文提出了一种通过模拟星图去除恒星背景提取目标的方法,利用模拟星图生成掩模,对实拍星图做去除恒星背景的处理。
2 基本原理
模拟星图去除恒星背景提取目标的基本原理如图1所示,通过实时引导信号传输到地基跟踪转台对空间目标进行拍照,同时根据拍摄参数(曝光时刻、方位俯仰、测站天文坐标)生成对应视场的模拟星图,即光测设备每拍摄一张照片,对应生成一张同视场的模拟星图,然后利用模拟星图生成掩模,对拍摄星图进行去除恒星背景的处理,提取出空间目标,优势在于利用一帧图像和对应的模拟星图就可以有效去除恒星背景提取空间目标。
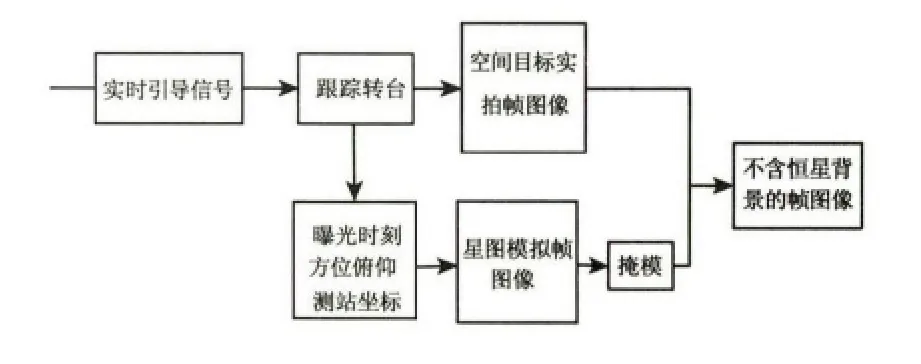
图1 基于星图模拟提取空间目标原理图
这种方法的关键技术在于高精度星图模拟,针对地基观测设备星图模拟主要有坐标系变换、视场星选取、星体赤道坐标修正三个步骤,并给出了利用模拟星图提取空间目标的实验结果。
3 坐标系变换
3.1 光轴指向计算
星图模拟首先需要确定光轴指向对应的赤道坐标。根据观测站的地理坐标、曝光时刻和光轴的方位俯仰可推算出光轴指向对应的赤经赤纬。各坐标系之间的关系如图2所示,其中(λ,)表示测站天文坐标,(h,A)表示光轴高度角方位角,(LHA,δ)表示恒星地方时角坐标,(α,δ)表示光轴指向赤道坐标,GMST(Greenwich mean sidereal time)表示格林尼治恒星平时[4]。

图2 坐标系转换关系
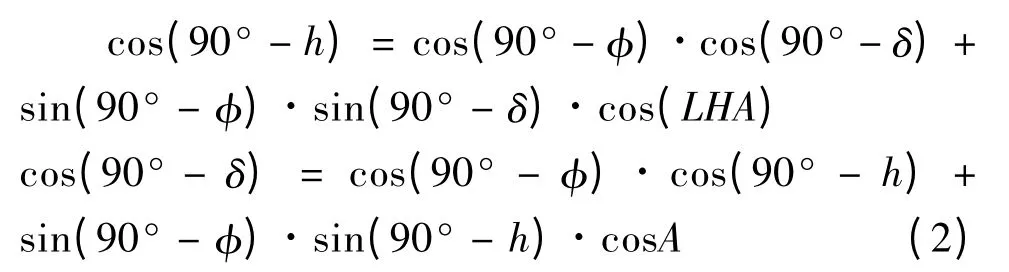
阴影部分为球面三角形,球面三角形PAS中内角K未知,由球面正弦定理可得一组方程:
由球面余弦定理可得两组方程:
时角、格林尼治恒星平时、赤道经度以及地理经度的关系为:

3.2 赤道坐标到焦平面坐标变换
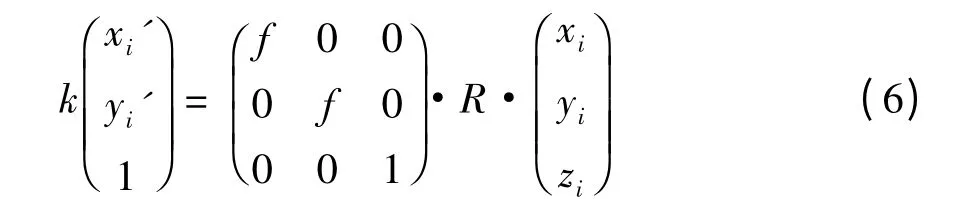
光轴指向计算中求得的赤道坐标为站心赤道坐标,星体站心赤道坐标系和相机坐标系转换只有旋转变换,其关系为:

其中,(Xi,Yi,Zi)为星点在相机坐标系的坐标,(xi,yi,zi)为星点在赤道坐标系的直角坐标表示,(αi,δi)为星点的赤经赤纬。
设由式(1)(2)(3)求出的光轴指向的赤道坐标为(α0,δ0),旋转矩阵可表示为[5]:

其中,0表示横滚角,横滚角由相机安装方式决定,一般情况下固定不变。

图3 相机坐标系和图像坐标系映射关系
相机坐标系和图像坐标系的映射关系忽略镜头的畸变影响,其坐标系变换如图3所示,满足相似三角形原理,则图像坐标系星点坐标(xi',yi')可表示为:
系数k,由第i颗星的Zi决定。已知CCD上光轴对应的像素为(u0,v0),像元尺寸为(dx,dy),星点对应的像素坐标(ui,vi)为:

4 视场星的选取
为保证能够去除星图中所有恒星背景,应选择完备导航星库,第谷第二星表涵盖了99%的11.0等以下的恒星,当光测设备具有较强的探测能力时,应选择第谷第二星表制作模拟星库。本文实验中,拍摄星图曝光时间短,只拍摄到了较亮的星,所以选取了依巴谷星表[6]中亮于9星等的星作为模拟星库。
视场为矩形视场,选定光轴指向附近较大范围内的星,先进行投影变换,再检测投影变换后的坐标是否在指定的像素坐标范围内,处于边界附近的星,考虑到星点成像的半径,可能出现星点质心在视场范围内,而像点部分像素溢出视场边缘,因此在对投影变换后的星像点选取时,对于星点质心坐标处于图4中阴影范围r内的星也予以剔除,r由恒星像点半径决定。
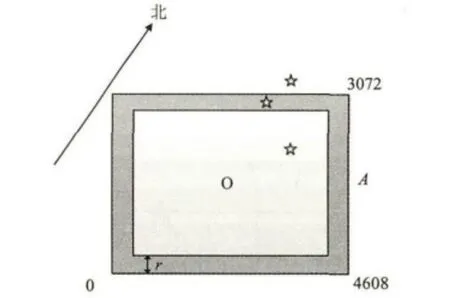
图4 视场星选取示意图
确定像点位置后,还需模拟星等亮度,星等转为灰度大小和像点大小[7],灰度大小G和像点半径R(单位:像素)与星等M的关系采用简单线性变换,变换公式为:


像点在以质心为中心半径为R的范围内服从标准差为1的高斯分布,R由统计实拍星图星点大小得出,考虑到实拍星图与模拟星图星点位置误差,通过形态学膨胀处理,模拟星图生成的星点半径R大于实拍星图中的星点半径4个像素。
5 星体赤道坐标修正
上述坐标系变换用到的星体赤道坐标是以测站为中心的赤道坐标(站心坐标),而依巴谷星表提供的星体赤道坐标是太阳系质心(日心)J2000时刻的赤道坐标,因此需要将星表中的J2000时刻日心赤道坐标转为当前时刻的站心坐标,其计算流程如图5所示。
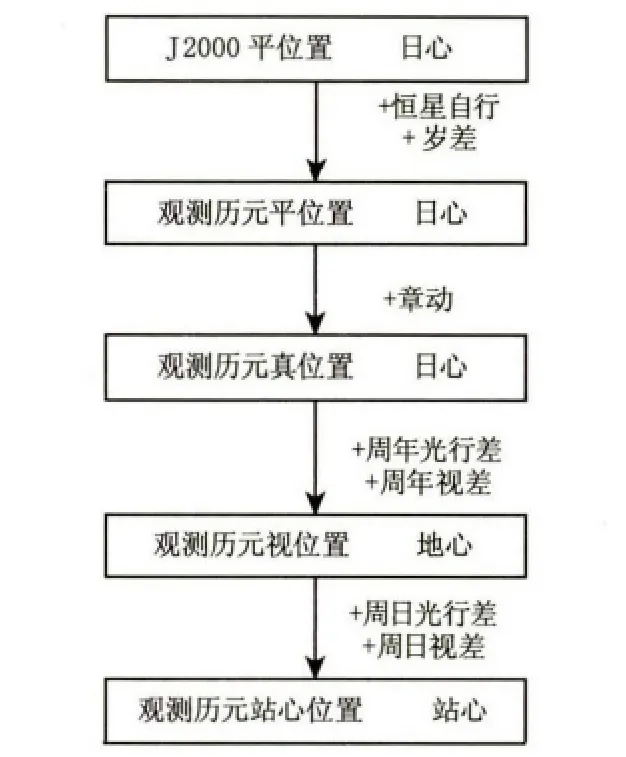
图5 星体赤道坐标修正流程图
其中恒星周年视差均小于1″[8],由于地球半径远小于公转轨道半径,所以周日视差可以忽略不计。周日光行差由地球自转造成,与测站位置有关,为方便计算,在计算时不修正恒星的赤经赤纬,而是修正恒星的地平坐标[9],修正大小均小于0.32″。设备所用相机一个像素对应的视场角约为4.1″,因此周年视差、周日视差和周日光行差对模拟星图恒星位置的影响不足1/3个像素,模拟星图用来生成掩模,不用来做精确计算,其精度满足去除恒星背景的需求。计算结果相当于忽略了周年视差影响的观测历元视位置。
恒星自行、光行差参考了文献[4],岁差章动模型采用了IAU2000A岁差章动模型[10],限于篇幅这里不再讨论具体计算过程,对猎户座的参一(星号26727)、参二(星号26311)、参三(星号25930)星宿给出2014年10月10日世界时0时的视位置计算结果,对比《2014中国天文年历》(恒星视位置坐标)结果给出计算精度,如表1所示。

表1 视位置计算结果比较
6 实验结果
设备所用相机的分辨率为4608×3072,CMOS尺寸32 mm×24 mm,镜头焦距为391.3 mm,口径140 mm。北京时间2013年11月18日0时27分57秒(计算时需转为世界时)拍摄的猎户座星图如图6所示,由于拍摄的星图中并没有空间目标,在拍摄星图中添加一个亮点作为空间目标来提取(图中用圆圈所标记亮点)。方位俯仰:(146.51727°,43.33358°),横滚角:-26.33001°,测站坐标:(116.4075°,39.9040°),修正大气蒙差后的方位俯仰:(146.51727°,43.32331°),求得光轴指向为(83.95605°,-1.450843°),将星表J2000平位置坐标转为当前纪元视位置坐标,选取星点得到模拟星图如图7所示。

图6 添加了目标的拍摄星图

图7 模拟星图
利用模拟星图生成掩模,对拍摄星图去除恒星的处理结果如图8所示。结果显示恒星背景得到了有效地去除,提取出了添加的亮点目标。对拍摄星图标记星点1~7(如图9所示)进行像素坐标误差统计[11],结果如表2所示。

图8 目标提取结果

图9 拍摄星图恒星标记
由上述数据可以看出,视场中心附近实拍星图和模拟星图星点坐标误差较小,视场边缘坐标误差较大,产生以上误差主要原因有:①转台码盘输出的方位俯仰与光轴实际的方位俯仰的误差,属于系统误差;②投影变换中未考虑镜头畸变,导致视场边缘坐标误差较大;③大气情况复杂,大气蒙差校正有误差。本文中未作以上修正,通过形态学膨胀处理确定了模拟星图星点半径R,使模拟星图生成的掩模能够去除质心位置有偏差的实拍星图的星点背景。下一步工作中可对镜头畸变导致的误差进行精确修正,使模拟星图恒星所占的像素大小与实拍星图恒星所占像素更加接近,可预防当空间目标与恒星相近邻时,由于模拟星点太大而将空间目标像点的部分去除。同时还应考虑行星的影响,以降低目标检测虚警率。

表2 像素坐标误差统计
7 结论
实验证明用地基光测设备探测空间目标时,只需获取每帧图像的曝光时刻、测站天文坐标、设备光轴方位俯仰,就可通过星图模拟生成的掩模有效去除恒星背景,提取出帧图像中的空间目标图像。此方法不依赖于相邻帧图像之间的关系,利用一帧图像和对应的模拟星图就可以提取空间目标,具有较强实用性。
[1] LIAO Bin.Research of the targets detection in the sky background[D].Changsha:National University of Defense Technology,2002.(in Chinese)廖斌.星空背景下的目标检测研究[D].长沙:国防科技大学,2002.
[2] SHAO Xiujuan,HU Bingliang,YAN Peng.Research on target recognition algorithm for microspacecraft[J].Modern Electronics Technique,2010(4):163-165.(in Chinese)邵秀娟,胡炳樑,闫鹏.星空背景中目标识别算法研究[J].现代电子技术,2010(4):163-165.
[3]ZHANG Chunhua,ZHOU Xiaodong,CHEN Weizhen.Target trace acquisition method of star images based on background elimination[J].Infrared and Laser Engineering,2008,37(1):143-146.(in Chinese)张春华,周晓东,陈维真.基于背景抑制的星空图像目标运动轨迹提取[J].红外与激光工程,2008,37(1):143-146.
[4] Meeus J H.Astronomical algorithms[M].Willmann-Bell:Incorporated,1998.
[5] ZHANG Guangjun.Star Identification[M].Beijing:National Defense Industry Press,2011.(in Chinese)张广军.星图识别[M].北京:国防工业出版社,2011.
[6] Data-sharing Network of Astronomy Science[DB/OL].http://lamost. geodata. cn/Portal/dataCatalog/dataList.jsp.2014-04-20.(in Chinese)天文数据分中心[DB/OL].http://lamost.geodata.cn/Portal/dataCatalog/dataList.jsp.2014-04-20.
[7]CHEN Weizhen,ZHANGChunhua,WANGXuewei,et al.Moving target simulation of space observation serial images[J].Laser&Infrared,2008,38(3):300-303.(in Chinese)陈维真,张春华,王学伟,等.空间观测序列图像目标运动成像仿真[J].激光与红外,2008,38(3):300-303.
[8] WANG Anguo,JIA Chuanying,SUN Peng.Precise apparent position calculation of star in navigation[J].Journal of Traffic and Transportation Engineering,2004,4(4):117-120.(in Chinese)王安国,贾传荧,孙鹏.航用恒星视位置高精度计算[J].交通运输工程学报,2004,4(4):117-120.
[9] ZHANG Chao.System-level development and application research on astronomic surveying system base on electronic theodolites[D].Zhengzhou:PLA Information Engineering University,2009.(in Chinese)张超.基于电子经纬仪的天文测量系统及应用研究[D].郑州:郑州信息工程大学,2009.
[10]McCarthy D D,Petit G.IERS conventions(2003)[R].International Earth Rotation and Reference Systems Service(IERS)(GERMANY),2004.
[11]LI Deliang,RUAN Jin.Method adapting to the star sensor’s star extraction[J].Laser&Infrared,2009,39(12):1348-1350.(in Chinese)李德良,阮锦.一种适用于星敏感器的星点提取方法[J].激光与红外,2009,39(12):1348-1350.
