MAS技术下的海洋平台项目重量控制系统
2015-03-23李敬花李凌尧孙苗苗尹宝瑞
李敬花,李凌尧,孙苗苗,尹宝瑞
(1.哈尔滨工程大学船舶工程学院,黑龙江哈尔滨150001;2.海洋石油工程(青岛)有限公司设计部,山东青岛266520)
作为海洋平台项目管理中关键一环,重量控制贯穿于平台建造的全生命周期,是保证项目按期完工、按质交付的重要组成部分[1]。在实际的海洋平台建造过程中,结构局部调整等因素往往导致设计时的平台结构重量、重心与实际落成时存在一定差别,给工程作业带来了严重的安全隐患[2]。然而,实施行之有效的重量控制管理存在较大难度,具体表现于数据采集及处理信息量大,重控文件使用周期长、频率高,牵涉部门多、专业广等方面。
传统重量控制方法主要存在以下2个问题:1)各种数据主要靠事后采集汇总;2)实时性、集成性与可视化程度低[3]。现有的研究更多侧重于重量、重心控制的措施或精度调整方面[4-6],这些研究详细地阐述了海洋平台建造过程中关于重量、重心偏差的调整问题及解决方法,但对于重量控制流程关注不足;也有学者研究并设计重量控制系统来解决数据接口问题[7]和提高管理效率[8-9],但其偏重系统模块建立与分析,未能实现完整应用的重量控制系统。
对此,在明确海洋平台项目重量、重心的控制流程基础上,利用多智能体(multi-agent system,MAS)技术作为新的运行模式,将大而复杂的重量控制系统建设成聚合协作的智能管理系统[10],实现动态灵活、快速响应的重量控制具有一定的工程意义。
1 海洋平台项目重量控制流程
在海洋工程装备制造企业内部,海洋平台的重量控制管理是在设计部和施工部门间形成的一个不断计划、调整、跟踪、控制的循环过程。为描述平台建造全生命周期中的重量控制过程,明确各职能部门交互关系,采用UML建立重量控制业务流程图,如图1所示。
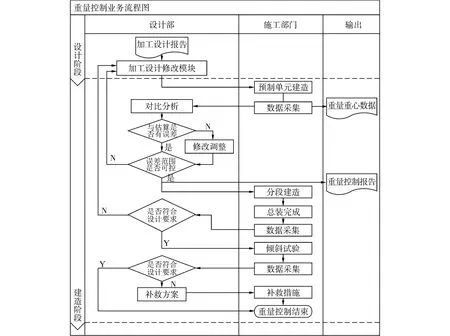
图1 基于UML的重量控制业务流程图Fig.1 Weight control flow chart based on UML
在设计阶段,设计部对详设方案进行加工设计,建立重量、重心模块理论模型,并生成各预制单元重量、重心的理论值。在项目进行过程中,设计部还要根据现场情况(设备、场地及材料等)的反馈信息进行修改,在图中体现为修改模块。
在建造阶段,施工部门依据图纸、工单进行平台建造,完成重量、重心数据采集工作。若理论值与实际值的误差范围超出裕度则需要返回到设计修改模块。若重量重心均符合要求,则编制相应的重量控制报告。总装和倾斜试验时仍需进行前述控制过程,此时若不符合要求,设计人员需立即提出补救方案。
2 基于MAS的重量控制系统模型
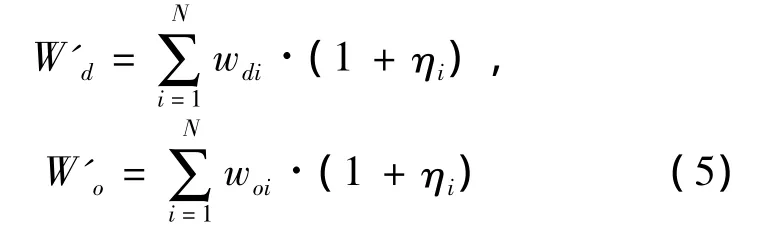
海洋平台项目重量控制不仅要求参与重控的各个部门/专业完成其相应的局部控制目标,同时还要兼顾协同完成全局的重量、重心控制任务。将MAS理论应用于海洋平台项目重量控制过程,即以A-gent来表示参与重量控制过程中的各逻辑资源或物理资源,利用网络结构将Agent链接成一个MAS形式的控制系统,可解决重量控制过程中所呈现的复杂性、动态性、多专业交互并行性等问题。可采用功能映射法(functional mapping method,FMM)对重量控制系统进行建模,海洋平台项目重量控制系统OPMAWCS(offshore platform multi-agent weight control system)模型如图2所示。系统粒度划分是依据所要实现的功能将系统划分为各职能Agent。据图2,OPMAWCS系统粒度划分结果如表1所示。
3 系统重控原理及体系结构
3.1 系统重控原理
重量控制是以构成海洋平台组块的预制单元为对象,通过对重量、重心实际值和理论值的对比分析,从而达到各单元及组块的重控目标。DCA将从X-Steel软件或者现场重控数据采集设备中获取重量、重心数据并通过IA导入OPMAWCS中。然后,系统实现重量控制的原理如下:
1)CA计算搭载后所构成组块的重量及重心坐标。这里,假设某一海洋平台组块中所含有的单元数为N,单元重量理论值为wdi、ηi为各个单元的裕度因子(考虑风载、浪载等影响因素留有的裕度范围),其重心坐标分别为xdi、ydi、zdi,该组块的重量、重心理论值分别为
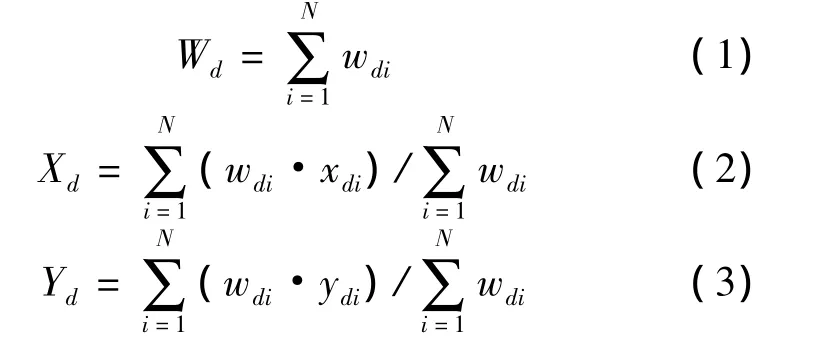

同理,计算得该组块的重量、重心实际值Wo、Xo、Yo、Zo。该组块重量计及裕度的理论值和实际值分别为
组块重量、重心实际值和理论值的差表示为


2)MA可设定误差接受度λ,若DW>λ,则提示报警,给出预警范围,并提供一定的预警分析;若DW≤λ,则重量控制符合要求。对重心预警同理。
3)随着组块搭载成海洋平台,WCA和GCA会记录重量、重心变化趋势;RA会根据操作人员需求生成相应的重控报告。
图2 基于MAS的海洋平台重量控制系统模型Fig.2 Weight control system model based on MAS
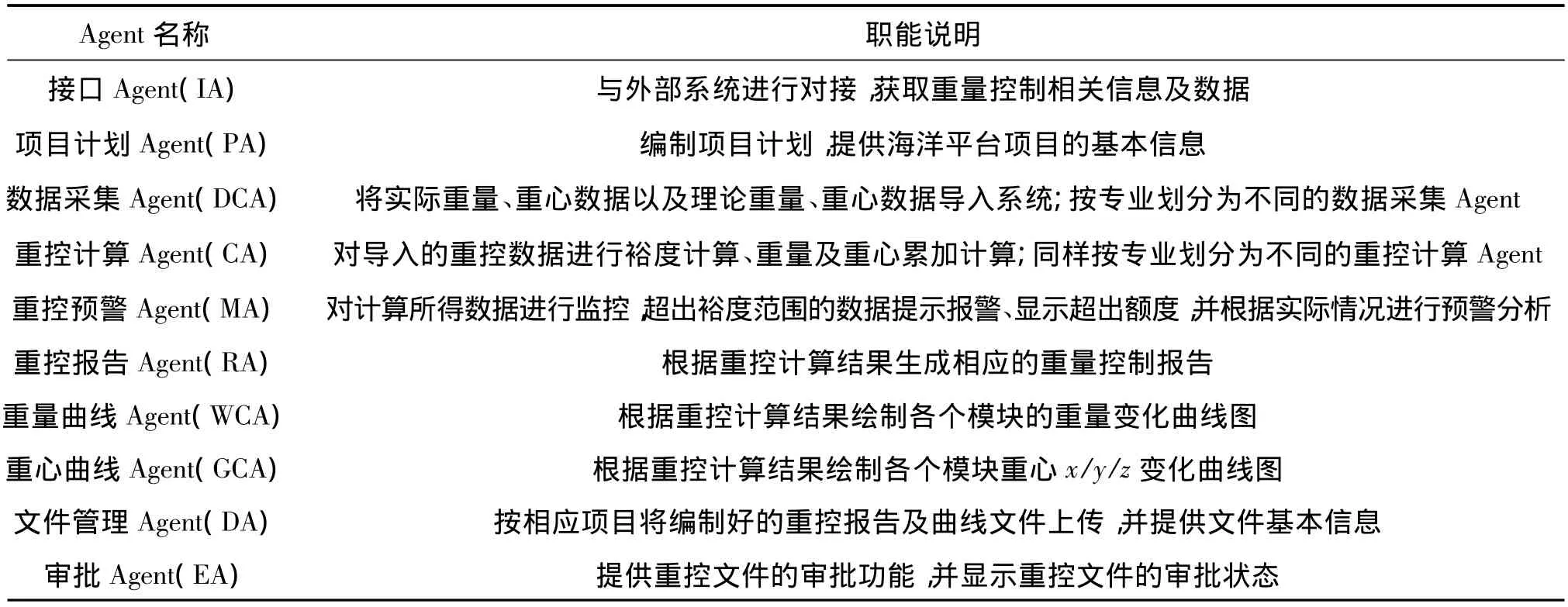
表1 OPMAWCS系统粒度划分Table 1 Granularity design of OPMAWCS system
3.2 Agent内部结构
OPMAWCS中Agent采用混合型结构(hybrid architecture)如图3所示,能够较好地满足海洋平台项目重量控制过程中快速响应、协同控制等要求。
Agent通过传感器感知作业环节、接收并传递重控数据及文件到信息处理单元,并由其完成消息处理、任务定义和决策:XML(extensive makeup language)分析器与KQML(knowledge query and manipulation language)分析器相结合将消息转换为本地的语义表达;任务定义包含任务过程定义(如CA关于重量、重心的计算操作)和参数定义(如MA对误差接受度的定义);确定任务后Agent从知识库、数据库中调用算法和数据,对任务进行操作决策。一经决策后,Agent中的执行器执行相应任务,并由执行监控器监控其准确性。此外,Agent结构中还包含通信模块和人机接口。通信模块根据系统定义的通信语言,使Agent通过消息/对话的方式实现信息交互。人机接口是使Agent通过与用户的对接,将重量控制处理结果实时地反馈给用户。
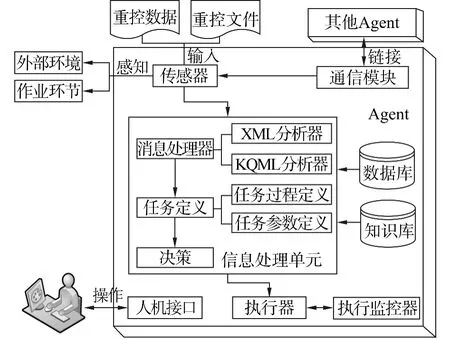
图3 OPMAWCS系统中Agent内部结构Fig.3 Internal structure of agents in OPMAWCS
3.3 系统体系结构
系统体系结构不仅反映了重量控制过程中系统的工作流程和逻辑结构,也体现了系统内部协同运作方式。OPMAWCS系统体系结构如图4所示。
OPMAWCS采用了层次结构与完全自治结构相结合的混合结构,各层次间通过Agent间的协同运作完成重量控制决策目标;在各个层次内部,又划分为互联的不同子MAS结构。OPMAWCS系统具有良好的智能性及柔性特点,体现在Agent不仅具备重控数据处理、决策指标和重控逻辑的智能运作能力,还具备通过协同来感知外部变化,自上而下调整重控数据处理结果的自主能力。
4 系统运行机制
OPMAWCS的运行依赖于Agent间的通信与协作。Agent间的通信实现了信息的交互及传递,有利于Agent对变化的快速响应;而各子MAS下的不同专业Agent通过协作实现了各模块功能,同时各个子MAS间的彼此协同构成了一个完整的重量控制系统,达到全局重量控制决策目标和控制要求,有利于提高了海洋平台项目重量控制效率。
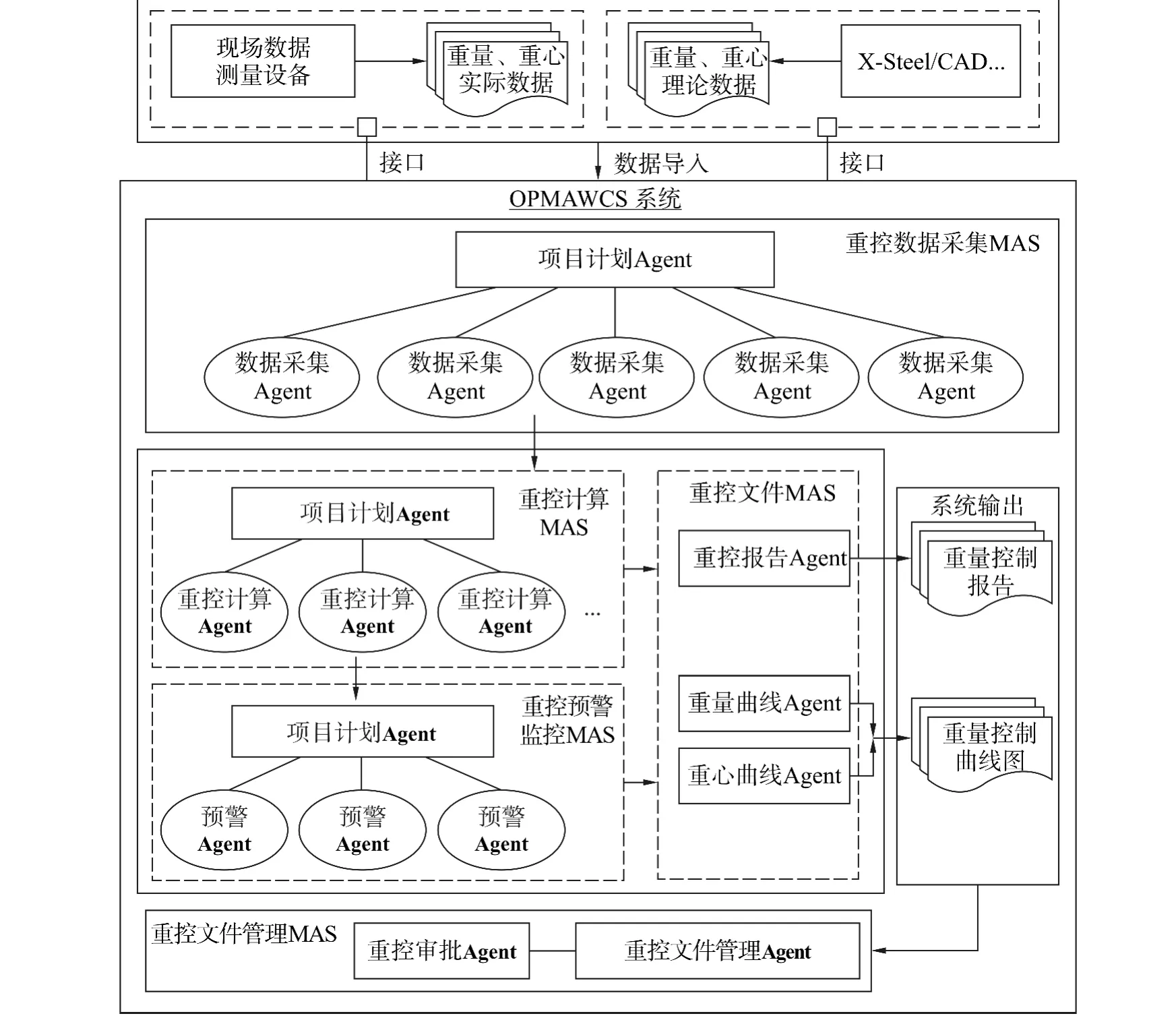
图4 OPMAWCS系统体系结构Fig.4 System architecture of OPMAWCS
4.1 Agent通信
Agent间的通信是通过消息传递的方式实现的,消息格式采用XML格式,语言采用KQML语言。这主要是因为其支持动态的、异构的、含大量自主节点环境下的知识信息共享与重用[11],非常适合处理重量控制过程中大量数据信息。
KQML依据Speech Act理论对Agent的通信言语行为进行分类,通过定义行为原语的方式来规范Agent最基本的言语行为。图5给出了OPMAWCS系统中Agent通信实例:CA向MA发送了一条关于组块Upper Deck中预制单元CEP-F-2720的重量理论值和实际值的确认信息。
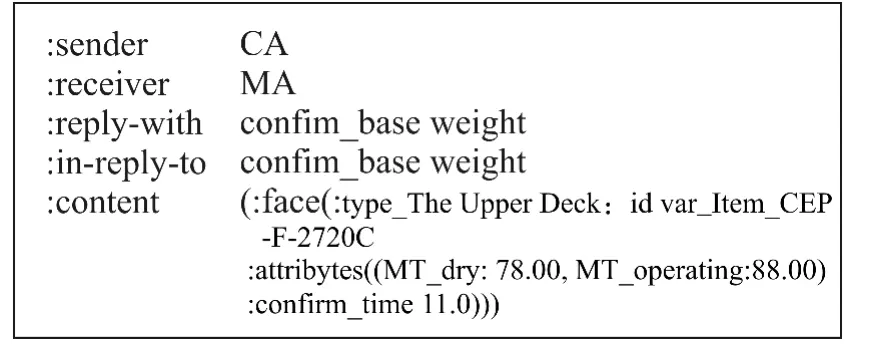
图5 OPMAWCS系统中Agent通信实例Fig.5 Communication example between agents in OPMAWCS
4.2 Agent协作
Agent间的协作保证了系统整体性,以实现重量控制决策目标,达到对海洋平台重量控制的要求。OPMAWCS的运行过程是由重控数据采集MAS、重控计算MAS、重控预警监控MAS、重控可视化MAS以及重控文件管理MAS协作完成的,其协作运行模型如图6所示。
外部系统将海洋平台各专业、组块所包含的单元的重量、重心理论值及实际反馈值经由数据采集MAS导入OPMAWCS系统中,并传递给重控计算MAS。重控计算MAS计算各个组块的重量、重心值以及计及裕度的重量、重心值后,交由重控预警MAS进行预警判断,若超出误差接受度,则提示预警信息,并给出相应的分析,最终传递给重控文件MAS。重控文件MAS按操作人员需求生成相应的重控报告、绘制重控曲线,并经由重控文件管理MAS上传至企业内部各项目组文件夹中。待重控文件审批后,若审批通过,则重控结束;若审批未通过,还需返还给外部系统进一步进行设计及修改,再重新经由OPMAWCS系统处理,直至满足要求。
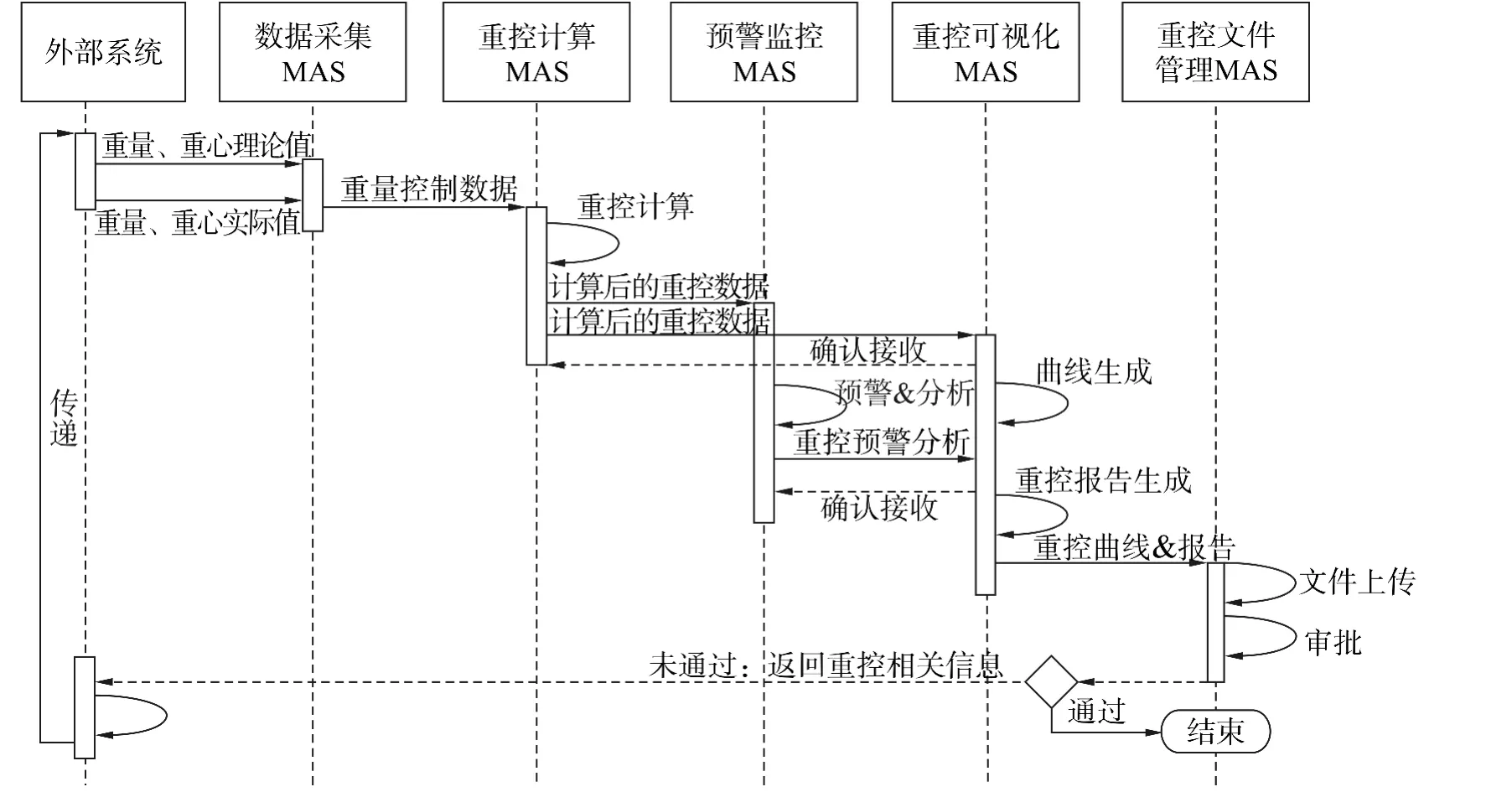
图6 OPMAWCS系统中各子MAS协作运行模型Fig.6 Cooperation model of sub-MAS in OPMAWCS
5 系统总体架构与实例验证
5.1 系统软件总体架构
OPMAWCS采用B/S(Browser浏览器/Server服务器)网络结构,其逻辑架构如图7所示。
1)人机交互。系统与操作人员间的信息接口。其中,界面层包含操作人员可视的各重量控制模块界面;功能层则是通过各个功能模块的交互,实现对海洋平台项目重量控制过程的模拟。
2)运行内核。运行内核对OPMAWCS中各种重量控制数据流、信息流等进行管理和控制,维护系统的运行。工具层与协同层是系统协同运作的核心所在。工具层则包含参与重控过程的各个Agent,而协同层主要包括重量控制过程中各个子MAS结构。模型层实现对海洋平台项目重量控制的仿真建模。
3)运行环境。是OPMAWCS所基于的硬件环境及开发框架。
5.2 实例验证
据前述对OPMAWCS软件总体架构的描述,依据Java智能体开发框架JADE(Java agent development framework)和J2EE(Java 2 platform enterprise edition)架构的工程项目,设计并完成了OPMAWCS系统的开发,该系统主要功能界面如图8所示。
实例验证完了以下任务:1)在JADE环境下建立了重量控制各个子MAS的Container,实现了OPMAWCS系统内部各个Agent之间的信息交互和传递;2)X-Steel软件导出的重量、重心理论数据或现场采集到的实际重控数据可直接导入OPMAWCS系统中;3)实现了重量控制过程中的基本功能,包括:重量、重心值的计算,海洋平台各个组块、预制单元重量预警及分析等;4)OPMAWCS系统提供重控曲线的可视化功能;5)重控相关文件可通过系统进行管理,包括文件上传、文件审批等,从而使得操作人员能够快速追溯文件信息。
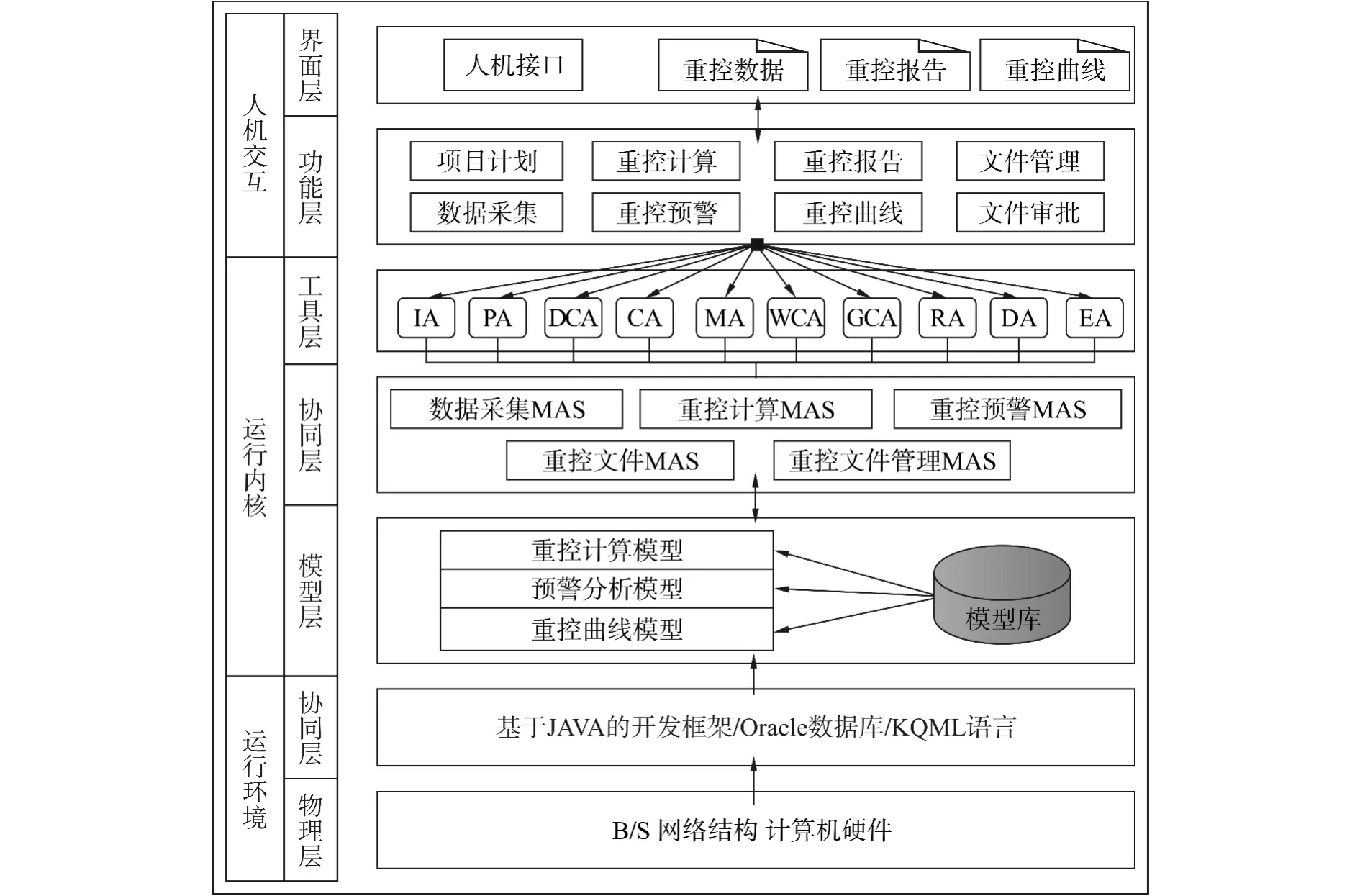
图7 OPMAWCS系统软件总体架构图Fig.7 Software architecture of OPMAWCS

图8 OPMAWCS系统主要功能界面Fig.8 Main function interfaces of OPMAWCS
6 结束语
利用MAS技术中Agent的自主性、协作性、异构性及交互性等智能特性提出了OPMAWCS系统模型,并在此基础上开发了海洋平台项目重量控制多智能体系统,经验证可完成海洋工程装备制造企业重量控制流程。该系统的开发不仅满足重控过程中大量数据的采集与处理的需求,同时实现了重控文件的智能化管理,有利于进一步提高海洋平台建造过程中的重量控制效率。对于重量控制过程中的重控曲线拟合、误差分析和解决方案、重量重心精度调整等方面仍有待进一步深入和完善。
[1]杨勤,汤晶,马鸿钢.自升式钻井平台重量控制研究[J].船舶工程,2012,34(S2):181-183.
YANG Qin,TANG Jing,MA Honggang.Weight control research of jack-up drilling rig[J].Ship Engineering,2012,34(S2):181-183.
[2]谢明智.大型海洋平台重量重心测试系统的研究与应用[D].上海:上海交通大学,2008:8-27.
XIE Mingzhi.Research and application of weight and barycenter measuring system for large-scale offshore platforms[D].Shanghai:Shanghai Jiao Tong University,2008:8-27.
[3]李章锦,刘检华,唐承统,等.面向复杂产品离散装配过程的电子看板系统实现与应用[J].计算机集成制造系统,2014,20(2):313-325.
LI Zhangjin,LIU Jianhua,TANG Chengtong,et al.Realization and application of electronic kanban system for discrete assembly process of complex product[J].Computer Integrated Manufacturing System,2014,20(2):313-325.
[4]刘玉君,胡日强,潘作为,等.海洋结构物空船的质量、质心精度控制技术研究[J].中国造船,2008,49(1): 41-46.
LIU Yujun,HU Riqiang,PAN Zuowei,et al.Study on accuracy control method of weight and gravity centre of offshore structures[J].Shipbuilding of China,2008,49 (1):41-46.
[5]龚闽,赵国良,彭震宇."中油海62"平台性能特点及重量重心控制[J].船舶工程,2012,34(5):86-88.
GONG Min,ZHAO Guoliang,PENG Zhenyu.Performance characteristics and control of weight and center of gravity for CPOE62 platform[J].Ship Engineering,2012,34(5): 86-88.
[6]SHI Qiqi,CHEN Wei,HU Jinhua.PDMS secondary development for weight control in offshore project[C]//2013 International Conference on Frontiers of Energy,Environment Materials and Civil Engineering.Shanghai,China,2013: 685-692.
[7]WU Hang,SONG Zhengrong,LI Lin,et al.Weight control technique in construction of deepwater floating platform[C]//Proceedings of 2013 International Conference on Frontiers of Energy,Environmental Materials and Civil Engineering(FEEMCE 2013).Shanghai,China,2013:671-677.
[8]刘玉君,胡日强,邓燕萍,等.基于局域网的空船重量重心统计管理数据库系统开发[J].造船技术,2007,(5):42-46.
LIU Yujun,HU Riqiang,DENG Yanping,et al.Database system development for the management of weight and centre of gravity of empty ship based on local area network[J].Shipbuilding of China,2007,(5):42-46.
[9]刘玉君,李瑞,汪骥,等.海洋结构物重量控制软件系统开发研究[C]//CAD/CAM学术交流会议论文集.厦门,2011:16-20.
LIU Yujun,LI Rui,WANG Ji,et al.Research on the system development of weight control of marine structure[C]// CAD/CAM Academic Exchange Conference Proceedings.Xiamen,China,2011:16-20.
[10]PALMIERI F,BUONANNO L,VENTICINQUE S.A distributed scheduling framework based on selfish autonomous agents for federated cloud environments[J].Future Generation Computer Systems,2013,29:1461-1472.
[11]LIU Xinhua,PENG Gaoliang,LIU Xiumei,et al.Development of a collaborative virtual maintenance environment with agent technology[J].Journal of Manufacturing Systems,2010,29(4):173-181.
