基于计算机并口的电磁式微电机驱动系统设计
2015-03-12李胜勇肖奇军
李胜勇,肖奇军
(1.厦门蒙发利科技(集团)股份有限公司,厦门361008;2.肇庆学院,肇庆526061)
0 引 言
本文主要以MEMS 强链应用为具体实例,设计了一个基于计算机并口的电磁式微电机驱动系统。这种强链是一种能量门控或开关机构,可广泛用于国防装备、武器引信、要害部门等国防领域,也可用于信息安全领域,如政府机关、信息数据库、金融等场合。
基于非硅MEMS 技术制造的独特结构的电磁式微电机,采用双定子单转子结构,具有转矩大、电压低、转速高等优点。这种微电机应用于强链驱动系统中,具有独特的效果。在实际驱动过程中,施加不同的矢量电流,改变定子绕组驱动转矩,从而改变步进的角度,这样可以避免需要不同结构电机来产生不同转矩。微电机这样的电气结构,使得变速的输出成为可能,减少了传动机构,提高了系统稳定性和装配性。微电机的输出转矩最大可达2.8 N·m,也无需通过减速提高转矩,摩擦问题就可以大大减少。本文设计中采用的电磁式微电机就是双定子单转子的独特结构[1]。
1 MEMS 强链结构
MEMS 强链的结构如图1 所示。结构由三部分组成,包括两组鉴码机构、两组复位机构和一个耦合机构[2]。其中,一组鉴码码盘、驱动微电机依次从上至下安装在棘轮套装轴上,外面结构体对其进行定位,形成其中一组鉴码机构;棘爪、复位微电机按顺序套装在棘爪安装轴上,形成一组复位机构;另外一组鉴码、复位机构与此类似。信息耦合采用光电耦合盘,随动式,可复位的MEMS 强链结构如图1所示[3]。结构尺寸为35 mm×25 mm×25 mm 计算机并口的输出信号分别传递给两个驱动电机和两个复位电机的驱动器,然后分别再与相应的微电机相连,执行鉴码机构的运行与复位,最终完成系统的能量门开启与否以及复位过程[4-5]。

图1 MEMS 强链结构与系统
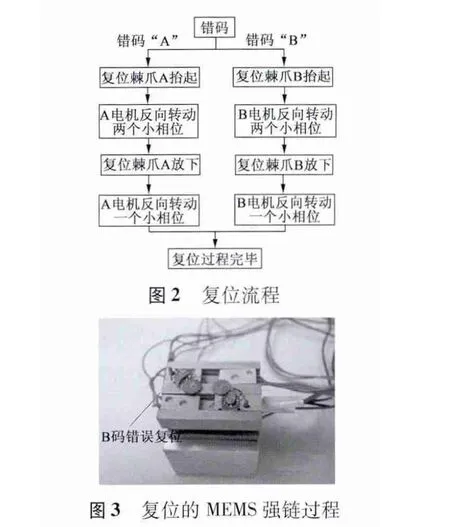
图2 为系统运行复位流程。这里以输入码第八位错误(即应为“A”,而实际为“B”)说明复位过程。假如输入的密码为“BABBABBBAAA…”,假设前七位码是正确的,第八位码“B”是错的。由于第八位错误,应该驱动码轮A。这样一来,由于错误驱动,码轮B 必将与码轮A 干涉,强链无法运行。这种状态下,复位电机B 驱动棘爪使其转动22.5°,将棘爪离开棘轮卡位,密码驱动电机B 反方向运转7.5° ×2 =15°。复位电机B 实现整个复位过程,图3 为复位过程。
2 微电机换相规则
驱动电磁式微电机为三相星形绕组结构,如图4(a)所示,图4(b)所示为其力矩矢量图,其它B,-B,C,-C 的定义与A 相定义相同。
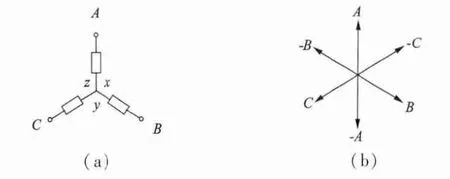
图4 微电机绕组相位连接和矢量力矩
在每一个运行瞬间,微电机由于无中线引出,对其进行组合,共计有12 种通电状态,于是形成12 个矢量力矩,如图5 所示。
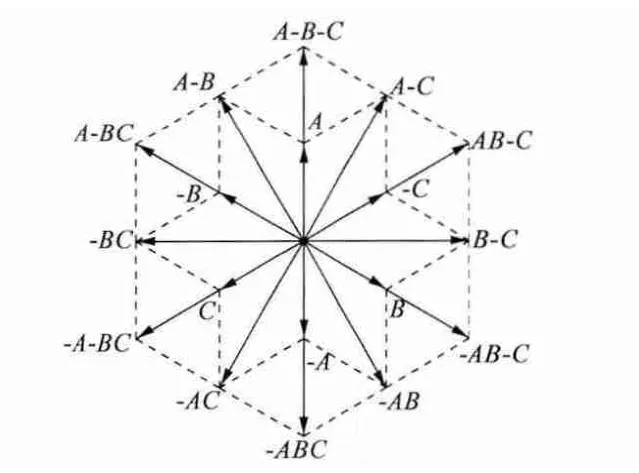
图5 12 种状态对应的矢量力矩
系统中的MEMS 强链电机采用十二拍换相实现22.5°机械步进驱动。在图6 所示的矢量力矩图中,总计有一种这样的二、三通电十二拍换相模式,轴向磁场微电机22.5°机械步进驱动由每4 个换相状态完成。

图6 十二拍模式
3 控制电路设计
PCI-7248 与L6234 芯片的连线方式,如图7所示。利用L6234 芯片实现电路中微电机的驱动,它是一个由可以输入使能的三个半桥组成的驱动芯片,能够实现防止交叉导通、热关断、50 kHz 工作频率、能输出5 A 大电流等功能。
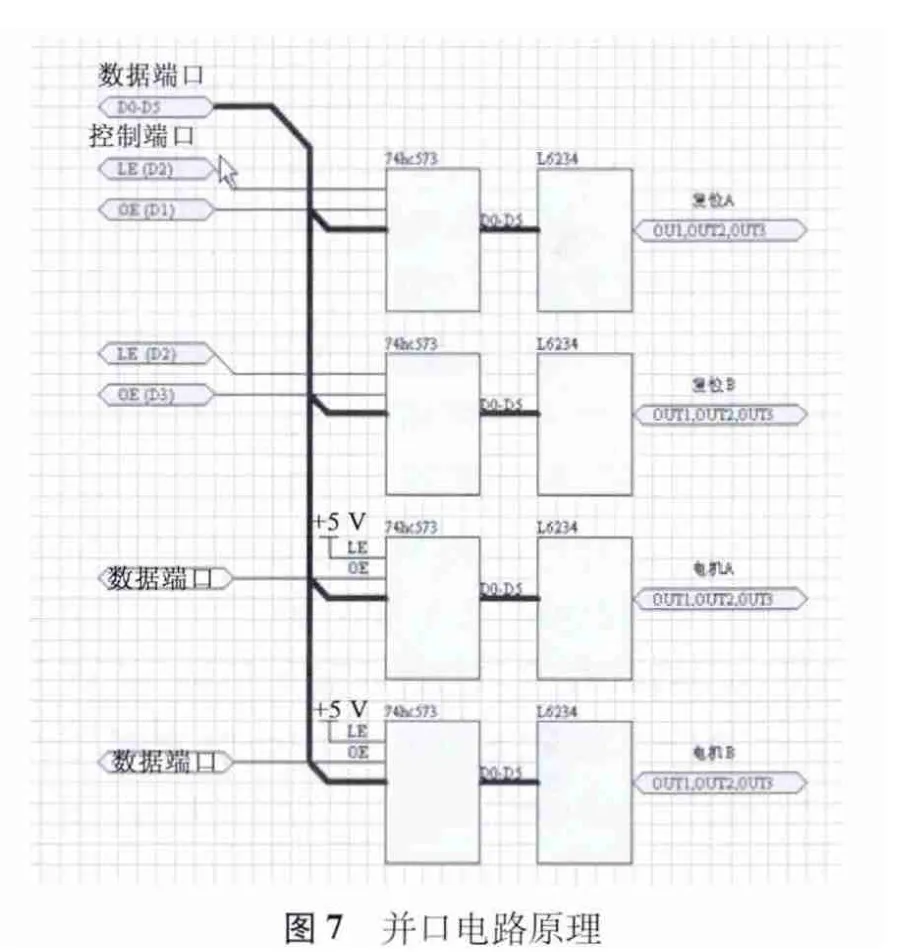
通过设定芯片L6234 的IN1,EN1,IN2,EN2,IN3,EN3 的逻辑值来开关T1 至T6,共计6 个MOS管。当相应的EN1,EN2,EN3 为低电平时,切断相应通道,当EN1,EN2,EN3 为高电平时,打开相应通道。当IN1,IN2,IN3 为高时,上DMOS 晶体管打开,当IN1,IN2,IN3 为低时,下DMOS 晶体管打开,电流方向改变。OUT1,OUT2,OUT3 分别为电机输入相位的A 相,B 相和C 相。只需改变以上6 个输入值,即可实现微电机的电流换相,从而使其实现步进运动的改变[6]。
4 并口编程实现系统的控制
通过编程,使用PC 机并口来实现对四个电机的控制。计算机提供了三个寄存器,即数据寄存器,状态寄存器和控制寄存器。并口的输入/输出分别对应端口378H,379H 和37AH。使用数据寄存器的D0 -D5 作为数据总线。利用并口的Pin2 ~Pin7 进行输出。D6,D7 分别接到两片74HC573 的OE 端,选通两个工作电机,利用并口的Pin8,Pin9 实现输出。控制寄存器的D1,D3 分别控制复位电机A,B的使能,利用并口的Pin14,Pin17 实现输出。当复位工作时,要求有两台电机同时工作,因此复位电机接口需要具有锁存功能,因为两台复位电机不会同时工作,所以可以共用一个锁存线。采用控制寄存器的D2 作为锁存(LE)信号,采用并口的Pin16 输出相应信号。并口输出的命令采用C 语言的outportb()函数或汇编的out 命令向378 及37 A 端口写命令字来实现。
微电机按照如图8 所示的相位循环运转,其中,加下划线的是状态稳定相位,称之为大相位,它们之间间隔22.5°。中间的两个是过渡态相位,称之为小相位,它们之间间隔7.5°。由此可见,一个大相位由三个小相位组成。电机运行4 个大相位为一个循环,经过4 个循环后回到原始位置。L6234 输入一定的控制字,输出端输出与其相对的相位。

图8 微电机循环相位
正常鉴码时,码轮集运行24 位密码,打开光电耦合器,能量耦合,达到开启计算机的功能,然后再输出8 个相位使MEMS 强链恢复到初始位置。
下面以一个鉴码过程说明复位时MEMS 强链的电气特性。例如,输入的解码为“AABBABABAAABBB…”,假设第六位密码正确,第七位密码“A”错误。如果MEMS 强链的初始相位是-BC,输出第七位密码(这时输出“A”,正确码应该是“B”)时,电机A 处在-BC 相位,电机B 处在A-B-C。这时需要电机 A 恢复到上一个相位(- ABC)才能继续解码。此时控制电路依次输出相位A -BC,A-B,A-B-C 到复位电机A,驱动棘爪抬起。复位电机A 的状态被锁存在A-B-C 这一相位,使棘爪保持在抬起状态。然后电机A 依次输出当前相位前的两个小相位(-A-BC,-AC),这时复位电机A 驱动棘爪放下,即控制电路输出A-B,A-BC,-BC 相位到复位电机A。最后电机A 再反方向走一个小相位(-AB -C),这样码轮就退回到了一个正确的位置,复位过程完成。
5 MEMS 强链的安全认证实例
以开启计算机操作系统为例,测试MEMS 强链能否正确解码,对MEMS 强链在输入误码下能否进行复位进行了多次测试实验。测试系统包括MESM强链、控制板、上位机,如图9 所示。
图9 计算机安全认证测试系统
正确解码测试如下:在计算机POST 过程中输入正确的密码,等待MEMS 强链工作完毕后,若操作系统开启,则本次试验完毕,并记录试验结果。如此反复,每次试验都成功解码。错误密码测试如下:该试验测试两种错位码的运行状况,一种是错位在“A”,码为“ABAABABBBBAAA”;另一种是错位在“B”,码为“ABAABABBBBB”。在计算机POST 过程中输入错误的密码启动鉴码,计算机提示MEMS强链走到错误位置,请按任意键复位,按键使得自动复位到初始相位,但计算机锁死,则本次试验完毕,并记录试验结果。如此反复,每次MEMS 强链都能完成自动复位过程。
6 结 语
基于MEMS 强链的计算机安全认证系统采用电磁式微电机作为驱动电机,通过计算机并口实现对MEMS 强链两个复位微电机和两个驱动微电机的控制,经过反复测试,系统稳定正常,没有发生异常情况,MEMS 强链计算机认证可有效杜绝非法入侵。
[1] 张琛.微执行器[M]. 上海:上海交通大学出版社,2005:58 -68.
[2] 张卫平. 基于MEMS 技术的微小机电强链[D].上海:上海交通大学,2004:28 -38.
[3] 陈文元,李胜勇,张卫平,等.具有自动复位系统的逐位鉴别可多次试开的MEMS 强链:中国,200610023449.5[P].2006 -08 -30.
[4] LI Sheng -yong,CHEN Wen -yuan,ZHANG Wei -ping,et al.Multi-try counter-meshing gears discrimination device based on MEMS technology[J]. Journal of Shanghai Jiaotong University(Sci.),2008,13(3):280 -284.
[5] LI Shengyong,CHEN Wenyuan,ZHANG Weiping,et al. Structure mechanism of MEMS security stronglink with multi - try function[C]//International Conference on Smart Materials and Nanotechnology in Engineering,Proc. of SPIE,2007:64235A-1 -64235A-7.
[6] 齐臣杰,刘理天,谭智敏. 微电机和微动力MEMS[J]. 电子科技导报,1999,(12):21 -23.
