电气化铁路隧道衬砌质量检测精度研究
2015-03-09廖红建朱军涛
张 帆,张 立,廖红建,朱军涛
(1.西安交通大学土木工程系,西安 710049; 2.西安铁路局科研所,西安 710054)
电气化铁路隧道衬砌质量检测精度研究
张帆1,张立1,廖红建1,朱军涛2
(1.西安交通大学土木工程系,西安710049; 2.西安铁路局科研所,西安710054)
摘要:针对我国既有电气化铁路隧道,空气耦合式探地雷达开始应用于隧道衬砌质量检测当中,其检测精度成为其应用的关键。应用GprMax二维模拟软件,结合空气耦合式探地雷达实际检测背景,对隧道衬砌5种实际工况进行模拟。通过建立各种工况不同尺寸隧道病害模型,对分界层进行识别,并对其进行逼近分析,计算衬砌及病害层厚度。根据反射回波特性,分析隧道衬砌及病害界面反射时间,探究空气耦合式探地雷达对隧道病害识别的精度,研究证明检测结果可以很好反映隧道衬砌实际情况。对探地雷达隧道检测数据分析及检测结果判定提供了理论依据,为探地雷达隧道衬砌质量在实际应用中隧道缺陷和病害能否识别以及识别分辨率问题提供了依据。
关键词:电气化铁路;隧道衬砌;隧道病害;识别精度;空气耦合式探地雷达
1概述
近年来我国铁路发展迅速,隧道病害是影响铁路行车安全的一个重要因素,因此对铁路隧道的质量检测提出了更高的要求。隧道围岩长期在线路荷载振动等作用下,会出现衬砌厚度不足、衬砌空洞、衬砌脱空、衬砌浸水等隧道病害,甚至会危及到行车安全[1]。
最直接和原始检测隧道衬砌的方法是机械的开挖和钻孔取样,然而,机械开挖的方法有损衬砌且效率低下,并且其操作危险。为了满足铁路隧道的探测高效、无损的要求,在铁路隧道衬砌检测当中开始使用探地雷达测试技术,它具有简便高效、准确无损、实时检测等优点。但是目前国内外广泛采用的是地面耦合式探地雷达,在应用过程中仍然需要停电作业,检测时间长。根据目前我国电气化铁路的实际情况,研制了车载探地雷达技术[2-3],使探地雷达在远距离条件下能连续全断面检测隧道状态,无需停电作业,实现既有线铁路隧道衬砌质量快速自动检测[4-5]。
本文应用GprMax二维模拟软件,结合空气耦合式探地雷达实际检测背景,对隧道衬砌各种实际工况进行模拟,分析隧道衬砌病害,探究空气耦合式探地雷达对隧道病害识别的精度。
2GprMax2D正演模拟原理
时域有限差分法(Finite-Difference Time-Domain, FDTD)是电磁场计算领域的一种常用方法,由K.S.Yee于1966年提出[6],其模型基础就是电动力学中最基本的麦克斯韦方程(Maxwell’s equation)。在FDTD方法提出之后,随着计算技术,特别是电子计算机技术的发展,FDTD方法得到了长足的发展,在电磁学、电子学、光学等领域都得到了广泛的应用。
在宏观范围内,所有的电磁现象,都是由麦克斯韦方程来表示的,通常用以下偏微分方程来描述电磁场量之间的关系
(1)
(2)
(3)
(4)
其中,t为时间,s;qv为电荷密度,C/m3;B为磁感应强度,Wb/m2;D为点位移矢量,C/m2;H为磁场强度,A/m;E为电场强度,F/m;J为电流密度,A/m2。方程中的各个向量都是无界、连续的。
对模型进行FDTD网格划分,空间离散Δx、Δy和时间离散Δt的大小很重要,其值越小模型越精确,但运行量会越大。因此,要同时保证模型具有满意的精度和运行速度,应该确定适量的时间步长Δx、Δy。Δt可以通过以下公式确定
(5)
其中,c为光速。
探地雷达是通过探测有限领域和目标距离来确定目标,因此,需假设一个近似条件,即吸收边界条件(ABC),其作用是吸收电磁波能量,从而达到模拟无界空间的要求[7-8]。
3隧道衬砌质量检测精度
3.1各工况模型(表1)
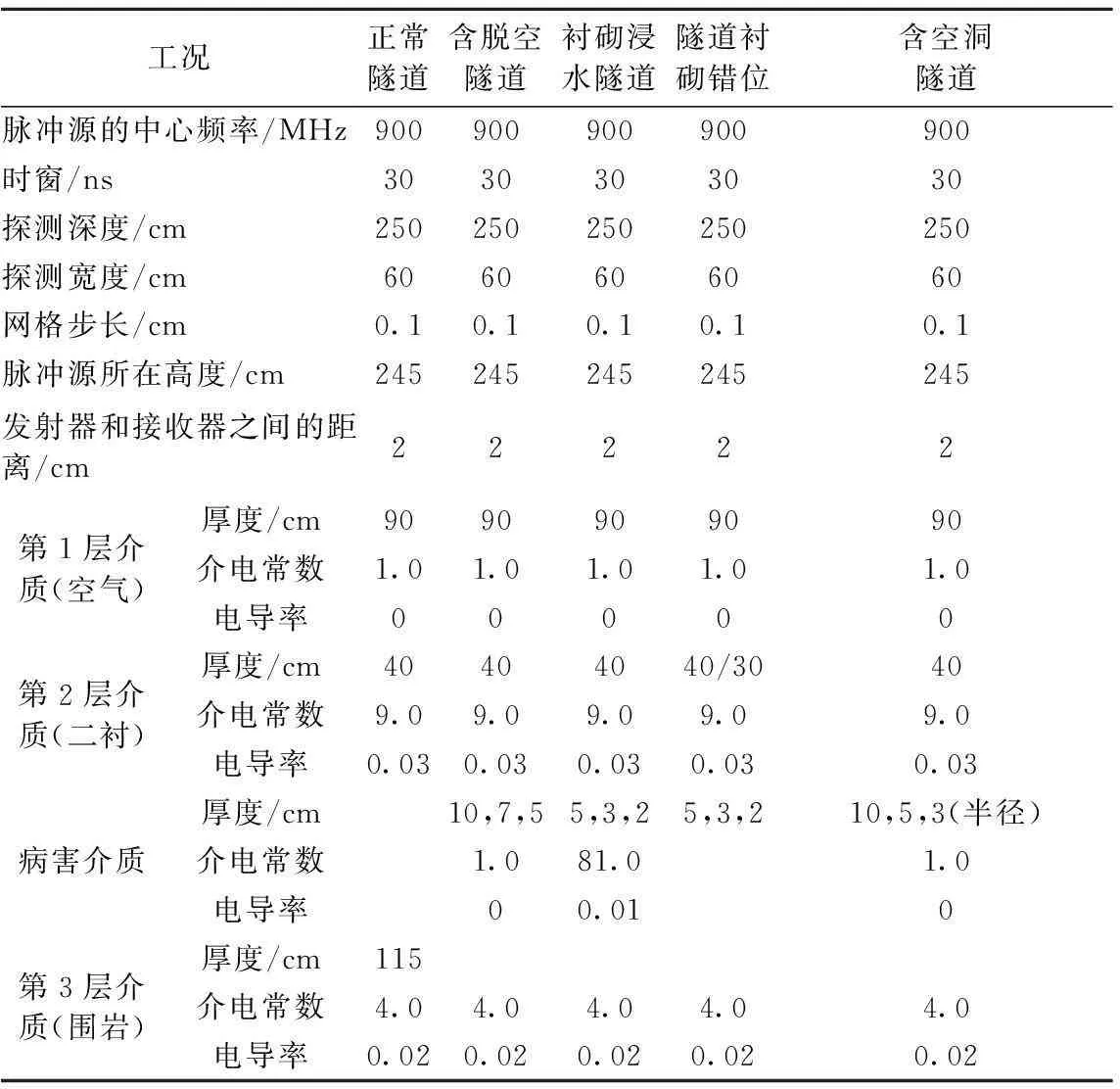
表1 实际隧道工况衬砌模型
应用GprMax二维模拟软件,结合空气耦合式探地雷达实际检测背景,建立5种实际工况模型,每种实际工况都包含不同尺寸大小的病害,对得到的反射波采用偏移及自动增益处理等处理方法[9-12],得到最终波形,并对其进行逼近分析。
在正常的隧道衬砌中,计算得两个界面之间衬砌的厚度s=0.797/2,相对误差为0.4%。其衬砌模型与信号见图1。
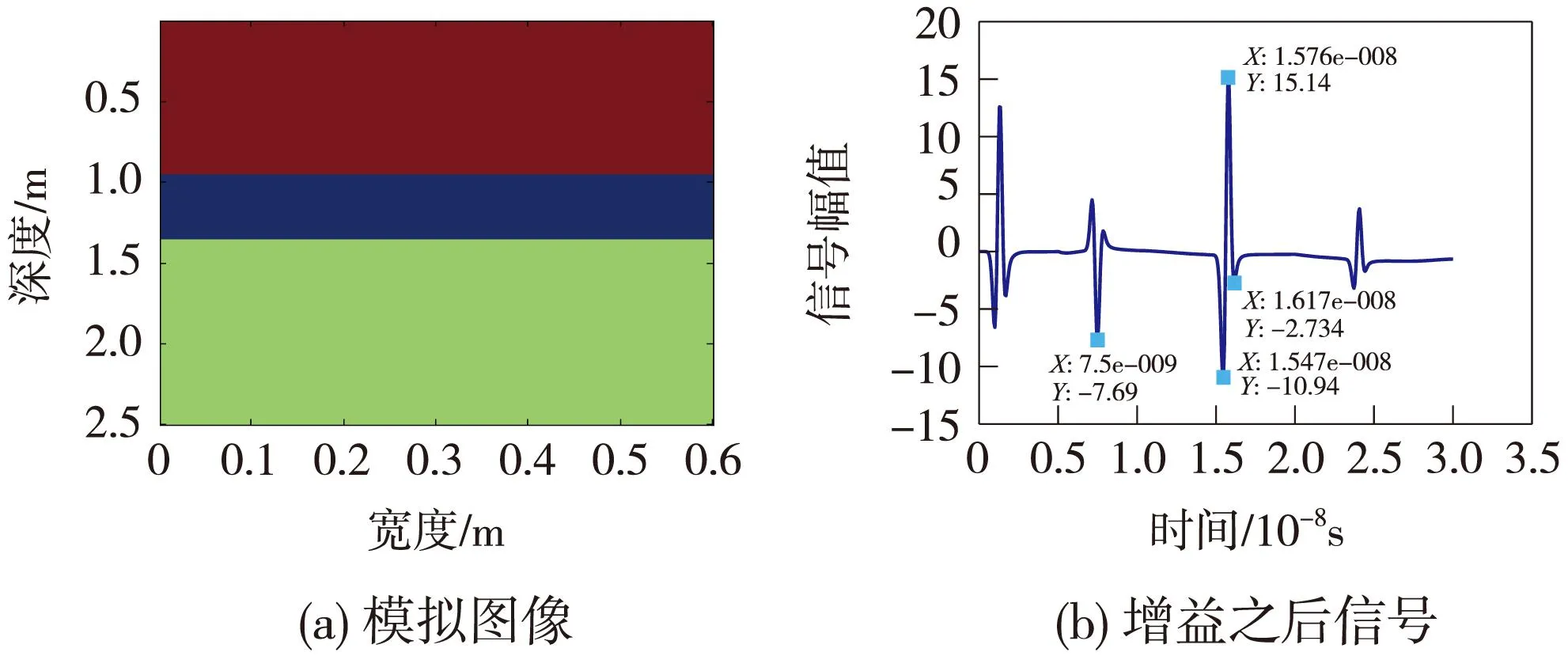
图1 正常隧道衬砌模型与信号
3.2脱空隧道衬砌识别精度
在有脱空厚度为10 cm的隧道衬砌中,计算得两个界面之间衬砌的厚度s=0.791/2 m,相对误差为1.1%。计算得两个界面之间脱空的厚度s=0.105/2 m,相对误差为47.5%,绝对误差为4.75 cm。误差是由于脱空厚度很小,且脱空层的介电常数为1,围岩的介电常数为4,两种介质很接近,因此在脱空层上界面较强的反射波覆盖了脱空层下界面较弱的反射波。衬砌脱空10 cm的模型与信号见图2。
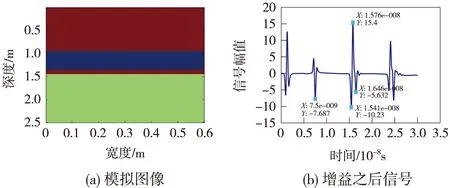
图2 脱空隧道衬砌模型与信号(d=10 cm)
由于误差太大,需要对其进行修正。根据波形图的分析,正常隧道波形震荡波第三个波峰值很弱,而脱空隧道波形,其第三个波峰较强,可取其为脱空下界面反射波的震荡波的第二个峰值,而上界面的震荡波第三个波峰值被覆盖,与正常隧道波形相比,脱空下界面反射时间取得就是上界面反射后的震荡波。根据脱空下界面反射波的震荡波的第二个峰值与上界面的震荡波第三个波峰值的时间差,可推断出下界面反射时间,计算得两个界面之间脱空的厚度s=0.192/2 m,相对误差为4%,绝对误差为0.4 cm。
对于厚度分别为7 cm和5 cm的脱空衬砌,从其单道反射波的情况可以看出,其波形和正常衬砌反射波形差别不大,从剖面图上定性分析,无法判断。如果定量分析,则脱空上界面反射波震荡波和下界面反射波重合,可计算出厚度为7 cm的脱空可计算出其脱空厚度s=0.062 m,绝对误差为0.008 m。综合定性和定量考虑,可识别的脱空最小厚度取为10 cm。如图3、图4所示。
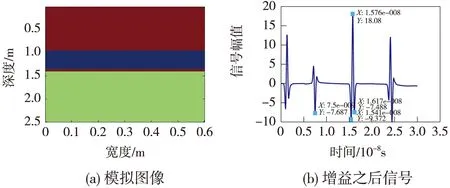
图4 脱空隧道衬砌模型与信号(d=5 cm)
3.3浸水隧道衬砌识别精度
在有浸水5 cm的隧道衬砌中,计算得两个界面之间衬砌的厚度s=0.797/2 m,相对误差为0.4%。计算得浸水两个界面之间的厚度s=0.115/2 m,相对误差为15%,绝对误差为0.75 cm。如图5所示。
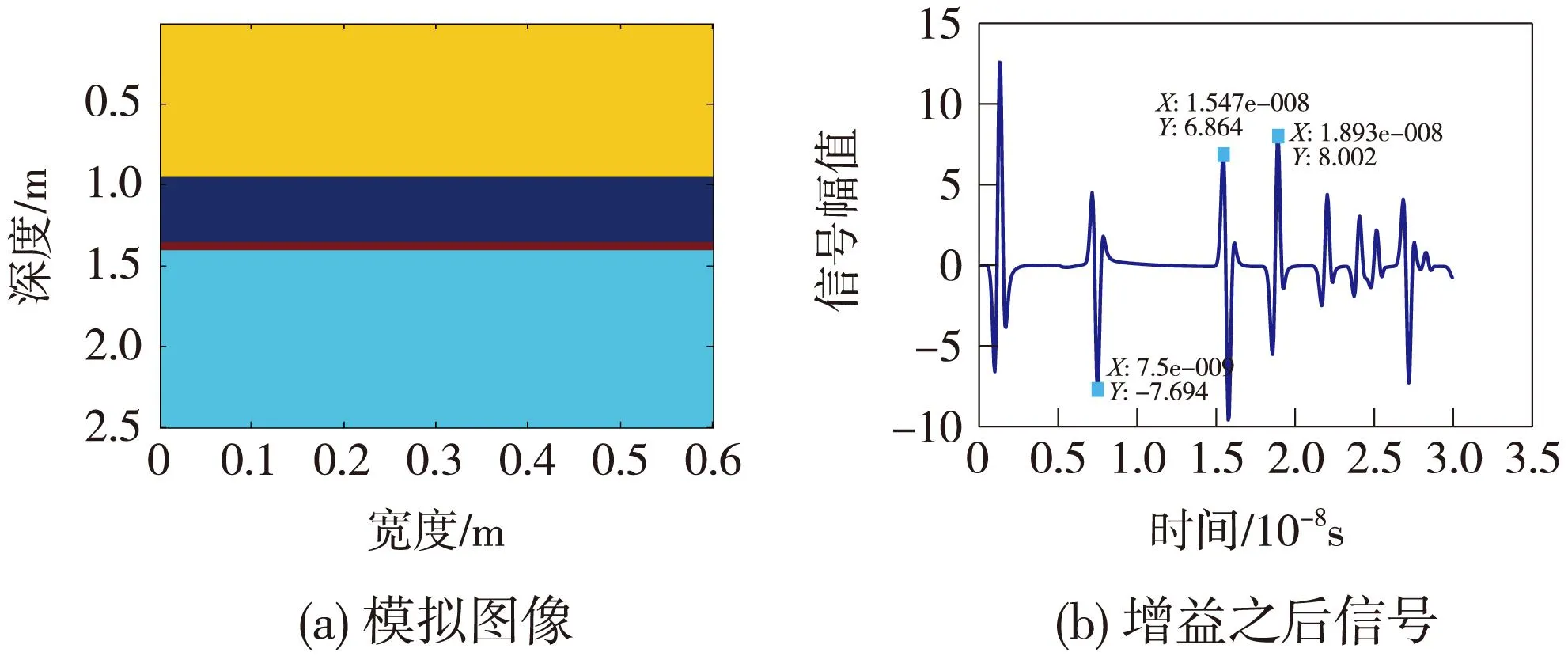
图5 浸水隧道衬砌模型与信号(d=5 cm)
在有浸水3 cm的隧道衬砌中,计算得两个界面之间衬砌的厚度s=0.797/2 m,相对误差为0.4%。计算得浸水两个界面之间的厚度s=0.072/2 m,相对误差为20%,绝对误差为0.6 cm。如图6所示。
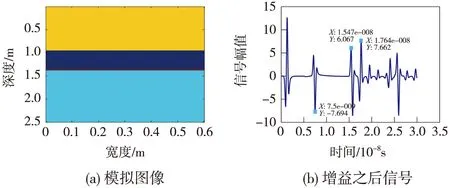
图6 浸水隧道衬砌模型与信号(d=3 cm)
在有浸水2 cm的隧道衬砌中,计算得两个界面之间衬砌的厚度s=0.797/2 m,相对误差为0.4%。计算得浸水两个界面之间的厚度s=0.053/2 m,相对误差为32%,绝对误差为0.65 cm。如图7所示。
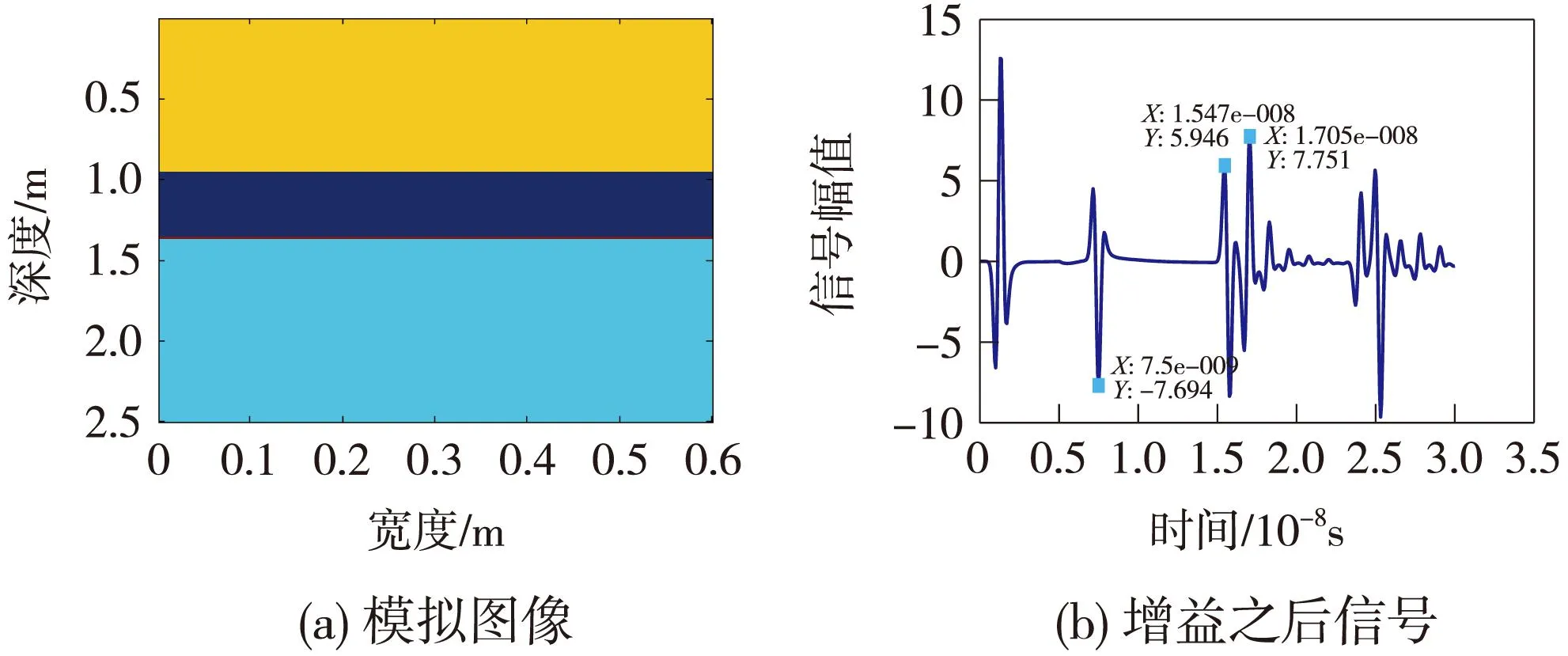
图7 浸水隧道衬砌模型与信号(d=2 cm)
从以上分析可以看出,对于衬砌浸水的情况,其特征很明显,定量的分析,其绝对误差也很小,可认为其对浸水的识别程度很高。
3.4含空洞隧道衬砌识别精度
在含空洞的隧道衬砌中,和脱空的隧道衬砌相比,其雷达剖面图中空洞对其他扫描道也有影响,但其逐渐减弱,呈抛物线状,且由于周围扫描道的影响,会有雷达波直达围岩的反射波,计算得两个界面之间衬砌的厚度s=0.586/2 m,相对误差为2.3%。在空洞两界面的反射时间也需要修正,修正后,算得空洞的半径r=0.195/2 m,相对误差为2.5%,绝对误差为0.025 cm。如图8所示。
在r=5 cm的空洞的隧道衬砌中,计算得两个界面之间衬砌的厚度s=0.686/2 m,相对误差为2.0%。在空洞两界面的反射时,可以看出空洞上界面反射震荡余波直接覆盖空洞下界面反射波,直接与围岩直达波相连接,因此空洞下界面的反射波与上界面震荡波重合,计算得空洞的半径r=0.105/2 m,相对误差为5%,绝对误差为0.25 cm。如图9所示。
在r=3 cm的空洞的隧道衬砌中,计算得两个界面之间衬砌的厚度s=0.727/2 m,相对误差为1.7%。在空洞两界面的反射时,可以看出空洞上界面反射震荡余波直接覆盖空洞下界面反射波,直接与围岩直达波相连接,因此空洞下界面的反射波与上界面震荡波重合,计算得空洞的半径r=0.029/2 m,相对误差为50%,绝对误差为1.6 cm。如图10所示。
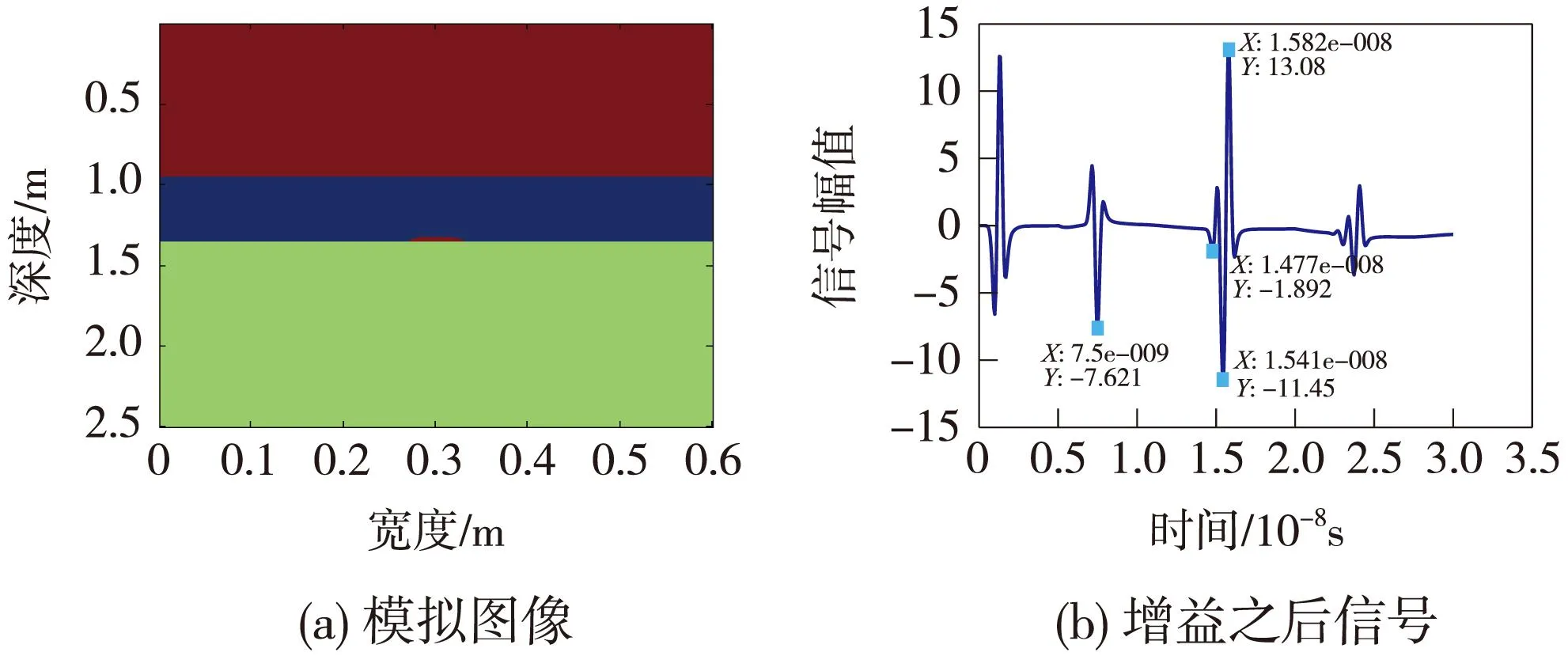
图10 空洞隧道衬砌模型与信号(r=3 cm)
综合以上计算,可得半径为3 cm的空洞其反射波特征不明显,且计算得到误差较大,因此认为空气耦合式探地雷达可识别的最小空洞半径为5 cm。
3.5错位隧道衬砌识别精度
在有5 cm错位的隧道衬砌中,两个单道波分别为错位前后任一扫描道的波形,对比两图可以发现,各个扫描道之间都相互影响,但是相对于本扫描道,根据其反射强度,仍可判断出分界层的位置,计算得衬砌前半部分两个界面之间衬砌的厚度s=0. 791/2 m,相对误差为1.1%。计算得衬砌后半部分两个界面之间衬砌的厚度s=0. 691/2 m,相对误差为1.3%。如图11所示。
在有3 cm错位的隧道衬砌中,两个单道波分别为错位前后任一扫描道的波形,对比两图可以发现,各个扫描道之间都相互影响,但是相对于本扫描道,根据其反射强度,仍可判断出分界层的位置,计算得衬砌前半部分两个界面之间衬砌的厚度s=0. 797/2 m,相对误差为0.4%。计算得衬砌后半部分两个界面之间衬砌的厚度s=0. 732/2 m,相对误差为1.1%。如图12所示。
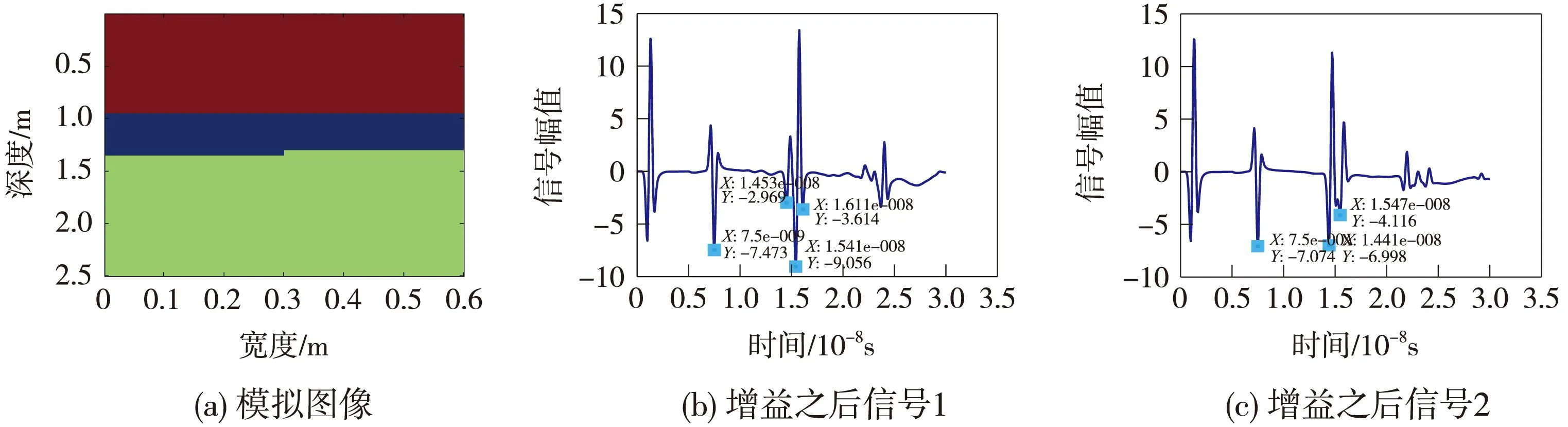
图11 错位隧道衬砌模型与信号(c=5 cm)
图12 错位隧道衬砌模型与信号(c=3 cm)
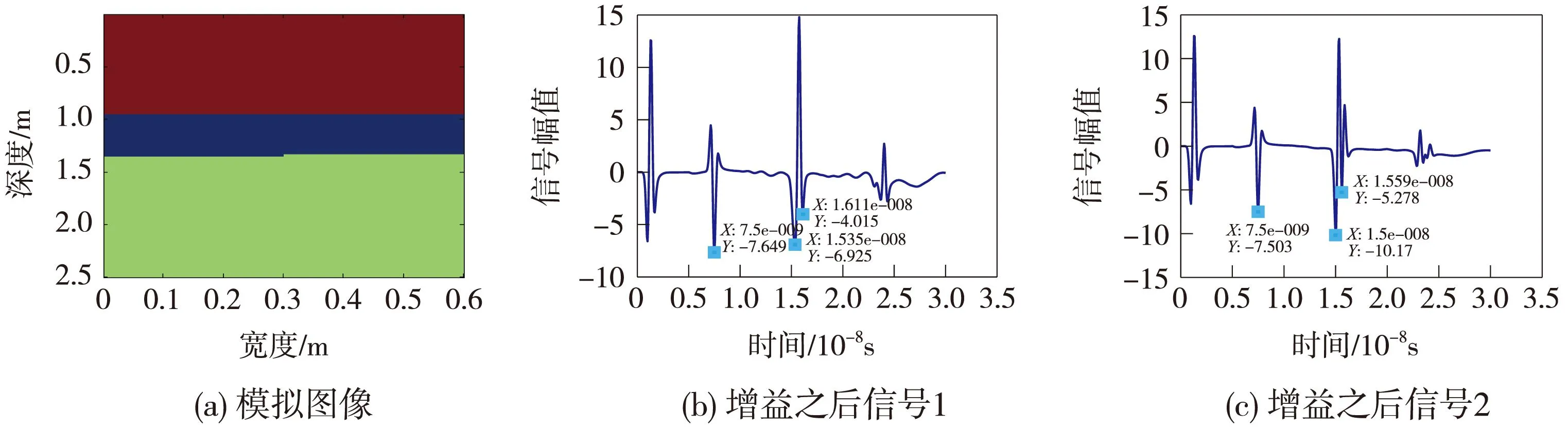
图13 错位隧道衬砌模型与信号(c=2 cm)
在有2 cm错位的隧道衬砌中,两个单道波分别为错位前后任一扫描道的波形,对比两图可以发现,各个扫描道之间都相互影响,但是相对于本扫描道,根据其反射强度,仍可判断出分界层的位置,计算得衬砌前半部分两个界面之间衬砌的厚度s=0. 785/2 m,相对误差为1.9%。计算得衬砌后半部分两个界面之间衬砌的厚度s=0. 75/2 m,相对误差为1.3%。如图13所示。可以看出,对于隧道衬砌错位,其识别精度很高,只要有错位就可以识别出来。
4结语
通过应用GPRMAX二维模拟软件对隧道衬砌进行模拟,在对各个模型及其结果进行对比分析后,得出结论:空气耦合式探地雷达可以用来进行隧道病害的检测,其检测结果可以很好地反映隧道衬砌实际情况,可识别的脱空最小厚度为10 cm;可识别任意厚度的浸水隧道衬砌;可以检测空洞的最小半径为5 cm;可识别任意厚度的错位隧道衬砌,其误差都在允许范围内。
参考文献:
[1]薄会审.铁路隧道衬砌质量检测与评价地质雷达技术实用手册[M].北京:地质出版社,2006.
[2]毛星.地质雷达在隧道超前地质预报中的应用[J].铁道标准设计,2014,58(S1):192-194.
[3]昝月稳.高速扫描多通道铁路车载探地雷达系统[J].西铁科技,2009(1):33-35.
[4]昝月稳,李桂明.既有线电气化铁路隧道病害全断面车载检测技术[J].中国铁路,2013(6):64-66.
[5]霍瑞科.隧道与地下工程[M].北京:中国建筑工业出版社,2011.
[6]K. S. Yee. Numerical solution of initial boundary value problems involving Maxwell’s equations in isotropic media[J]. IEEE Trans. Antennas Propagat. 1966(14):302-307.
[7]李亚飞.地质雷达超前地质预报正演模拟[D].北京:北京交通大学,2011.
[8]栗毅,黄春琳,雷文太.探地雷达理论与应用[M].北京:科学出版社,2006.
[9]朱军涛,廖红建,谢勇勇,等.采用短时傅里叶变换的铁路车载探地雷达数据解译方法[J].西安交通大学学报,2012,46(7):108-114.
[10]徐世强,杨少文,屈战辉.探地雷达波形特征及在隧道质量检测中的应用[J].西安工程大学学报,2012,26(6):791-794.
[11]李梦娟,李川.探地雷达检测衬砌厚度的研究[J].物探化探计算技术,2008(3):231-234.
[12]梁娜,沈文婷.地质雷达在隧道衬砌质量检测中的应用[J].土工基础,2013,27(2):132-135.
Research on Accuracy of Quality Detection of Electrified Railway Tunnel LiningZHANG Fan1, ZHANG Li1, LIAO Hong-jian1, ZHU Jun-tao2
(1.Department of Civil Engineering, Xi’an Jiaotong University, Xi’an 710049, China;2.Scientific and Technological Research Institute, Xi’an Railway Administration, Xi’an 710054, China)
Abstract:Air-coupled Ground Penetrating Radar (GPR) has began to be applied in the quality detection of tunnel lining, especially for the existing electrified railway tunnels in China, and the detection accuracy remains the key to the application. Based on the engineering application of the Air-coupled Ground Penetrating Radar, five kinds of working conditions of tunnel lining are simulated with GprMax two-dimensional simulation software. Tunnel defect models of different sized under different working conditions are established to identify the boundary layer, analyze the approximation and calculate the thicknesses of lining layer and defect layer. The reflection time of tunnel lining layer and tunnel defects are obtained according to echo characteristics, and the recognition accuracy of tunnel defects is identified with air-coupled GPR. The results show that the results of detection truly reflect the actual conditions of tunnel lining, providing a theoretical basis for tunnel detection data analysis and detection results assessment, and providing references for the recognition and accuracy of quality and defects defection for tunnel lining in the practical application of GPR.
Key words:Electrified railway; Tunnel lining; Tunnel defect; Detection accuracy; Air-coupled Ground Penetrating Radar
中图分类号:U455.91
文献标识码:A
DOI:10.13238/j.issn.1004-2954.2015.05.027
文章编号:1004-2954(2015)05-0119-05
作者简介:张帆(1987—),女,硕士研究生,E-mail:844789836@qq.com。
基金项目:国家自然科学基金资助项目(41172276,51279155)
收稿日期:2014-08-18; 修回日期:2014-08-28